Вам также может понравиться
- CSCI3420 Computer System Architectures Project Phase 2Документ6 страницCSCI3420 Computer System Architectures Project Phase 2Nic02417Оценок пока нет
- IT3030E CA Chap5 CPUДокумент82 страницыIT3030E CA Chap5 CPUNguyễn Trương Trường AnОценок пока нет
- Lab Manual-ICP Spring 2020Документ30 страницLab Manual-ICP Spring 2020Anas HussainОценок пока нет
- CA Chap4 Cpu Nlt2021 Part1Документ81 страницаCA Chap4 Cpu Nlt2021 Part1Khánh Hoàng VănОценок пока нет
- EE5530 Lecture18 Complete SV TestBenchДокумент45 страницEE5530 Lecture18 Complete SV TestBenchjithinkrishnac4474Оценок пока нет
- CA Chap4 CPUДокумент83 страницыCA Chap4 CPUTú PhạmОценок пока нет
- Iot Lab Manualdocx Compress Frtyygh SDDWWQ Qrtyhhb - CompressДокумент26 страницIot Lab Manualdocx Compress Frtyygh SDDWWQ Qrtyhhb - CompressVamsi PillabataniОценок пока нет
- CH5 2Документ24 страницыCH5 2sam negroОценок пока нет
- Assemblers Assemblers: System Software System Software Yy by by Leland L. Beck Leland L. BeckДокумент62 страницыAssemblers Assemblers: System Software System Software Yy by by Leland L. Beck Leland L. BeckPrabhat BhartolaОценок пока нет
- SV TB Example 1671687516Документ30 страницSV TB Example 1671687516Sumanish SharmaОценок пока нет
- Compiler Lecture 3Документ21 страницаCompiler Lecture 3bokhtiarbooksОценок пока нет
- Chapter 3 - Instruction FormatДокумент17 страницChapter 3 - Instruction Formattestscribd9898Оценок пока нет
- CPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfДокумент33 страницыCPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfLordwin MichealОценок пока нет
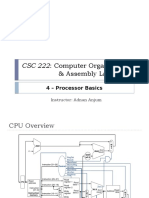
- CSC 222: Computer Organization: & Assembly LanguageДокумент22 страницыCSC 222: Computer Organization: & Assembly Languageذیشان چودھریОценок пока нет
- Compiler Lecture 3Документ21 страницаCompiler Lecture 3ShahRiaz PolokОценок пока нет
- Iot Lab ManualДокумент26 страницIot Lab Manualniharika0% (1)
- 6 RISCvsCISCДокумент28 страниц6 RISCvsCISCAnushiMaheshwariОценок пока нет
- C Programming: V3AcademycsДокумент10 страницC Programming: V3AcademycsMrinal AgarwalОценок пока нет
- Computer Organization & Computer Organization & Computer Organization & Computer Organization & Assembly Languages Assembly LanguagesДокумент119 страницComputer Organization & Computer Organization & Computer Organization & Computer Organization & Assembly Languages Assembly LanguagesEdel Karlo Sibidal ZarasateОценок пока нет
- CPL Manual 18 SchemeДокумент74 страницыCPL Manual 18 SchemedarcyОценок пока нет
- CSC 222: Computer Organization: & Assembly LanguageДокумент22 страницыCSC 222: Computer Organization: & Assembly LanguageAbdul RahmanОценок пока нет
- Computer Science Homework WorksheetДокумент5 страницComputer Science Homework WorksheetEe JianОценок пока нет
- L06 - RISCV Datapath DesignДокумент78 страницL06 - RISCV Datapath DesignMishkaat100% (1)
- C Ompiler Theory: (Intermediate C Ode Generation - Abstract S Yntax + 3 Address C Ode)Документ32 страницыC Ompiler Theory: (Intermediate C Ode Generation - Abstract S Yntax + 3 Address C Ode)Saipavanesh GuggilapuОценок пока нет
- Lab 7 PDFДокумент9 страницLab 7 PDFLeonardo FuchsОценок пока нет
- Algorithms and Algorithm ConventionДокумент28 страницAlgorithms and Algorithm ConventionSyed Aqib RazaОценок пока нет
- Chapter TwoДокумент81 страницаChapter TwoTigist AlemuОценок пока нет
- AAST-CC312-Fall 21-Lec 10Документ21 страницаAAST-CC312-Fall 21-Lec 10youssef hossamОценок пока нет
- Chapter 5Документ65 страницChapter 5WEGENE ARGOWОценок пока нет
- Mbed BK Ed2 CH 3Документ30 страницMbed BK Ed2 CH 3Pedro Augusto PeresОценок пока нет
- CS2311 Lec02 BasicДокумент83 страницыCS2311 Lec02 BasicHello HK WorldОценок пока нет
- Assembly NotesДокумент18 страницAssembly NotesMoazzam SonuОценок пока нет
- Computer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and FunctionsДокумент17 страницComputer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and Functionsdarwinvargas2011Оценок пока нет
- Compier Design AssignmentДокумент13 страницCompier Design AssignmentAshikur Rahman JoyОценок пока нет
- Week 2Документ22 страницыWeek 2Shubhadeep GhatakОценок пока нет
- Lecture 02 - MicrocontrollerДокумент37 страницLecture 02 - MicrocontrollerOmar AhmedОценок пока нет
- Unit 4 PCDДокумент15 страницUnit 4 PCDHariniDeviОценок пока нет
- Reading List: Aho-Sethi-Ullman: Chapter 6.1 6.2 Chapter 6.3 6.10 (Note: Glance Through It Only ForДокумент33 страницыReading List: Aho-Sethi-Ullman: Chapter 6.1 6.2 Chapter 6.3 6.10 (Note: Glance Through It Only ForEdgardo KamadaОценок пока нет
- Code Gen Part 2Документ38 страницCode Gen Part 2pajadhavОценок пока нет
- Module 2Документ14 страницModule 2yashmit maviОценок пока нет
- What Is A Computer?Документ7 страницWhat Is A Computer?arulamОценок пока нет
- Algorithms and Algorithm ConventionДокумент28 страницAlgorithms and Algorithm ConventionFizza IrfanОценок пока нет
- CPU Organization Bindu AgarwallaДокумент22 страницыCPU Organization Bindu AgarwallaNobodyОценок пока нет
- Ca 2 Marks & Big Ques PDFДокумент96 страницCa 2 Marks & Big Ques PDFsathya priyaОценок пока нет
- 01 Introduction To ProgramingДокумент26 страниц01 Introduction To ProgramingThomas OnitaОценок пока нет
- IICT Lecture # 01 Computer Definitions and BasicsДокумент34 страницыIICT Lecture # 01 Computer Definitions and BasicsRajab AliОценок пока нет
- Tema 2 GII EC Lenguaje Ensamblador Latest PDFДокумент88 страницTema 2 GII EC Lenguaje Ensamblador Latest PDFJorge ArmasОценок пока нет
- 03 Tutorial 01Документ27 страниц03 Tutorial 01SachinthaОценок пока нет
- LEC08Документ52 страницыLEC08Zain AliОценок пока нет
- Lab01 GDBДокумент5 страницLab01 GDBNahhОценок пока нет
- Bill Process: Scan Product Enter No of Units Calc Bill: Dept Store Billing System DiscountДокумент13 страницBill Process: Scan Product Enter No of Units Calc Bill: Dept Store Billing System DiscountMir Mohammed AliОценок пока нет
- ch2 PDFДокумент66 страницch2 PDFYousef MomaniОценок пока нет
- EE182: Computer Org. & Design Handout #05Документ8 страницEE182: Computer Org. & Design Handout #05ssridharatiwari0001Оценок пока нет
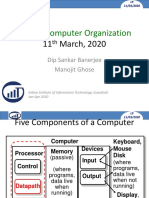
- CS104: Computer Organization: 11 March, 2020Документ37 страницCS104: Computer Organization: 11 March, 2020Om PrakashОценок пока нет
- Computer Programming Laboratory Work 4Документ7 страницComputer Programming Laboratory Work 4Maia ZaicaОценок пока нет
- EE5530 Lecture17 Complete SV TestBench With SCBДокумент35 страницEE5530 Lecture17 Complete SV TestBench With SCBjithinkrishnac4474Оценок пока нет
- Spos Lab ManualДокумент63 страницыSpos Lab ManualishikaОценок пока нет
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemОт EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemОценок пока нет
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОт EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkОценок пока нет
- Conceptual Programming: Conceptual Programming: Learn Programming the old way!От EverandConceptual Programming: Conceptual Programming: Learn Programming the old way!Оценок пока нет
- Cyber Security Maintenance Based On Human-Technology Aspects in Digital Transformation EraДокумент5 страницCyber Security Maintenance Based On Human-Technology Aspects in Digital Transformation EraNaz SamОценок пока нет
- Cyber SecurityДокумент21 страницаCyber SecurityNaz SamОценок пока нет
- Personal Details: Name: Postal Address: Email: Iqama NO: Nationality: Date of Birth: Contact NoДокумент3 страницыPersonal Details: Name: Postal Address: Email: Iqama NO: Nationality: Date of Birth: Contact NoNaz SamОценок пока нет
- Morning/Eveningazkar: Recite Between Asr To Magrib Sura Al-Fateha Dua 2 Al-Bakarah Verse 1-5Документ11 страницMorning/Eveningazkar: Recite Between Asr To Magrib Sura Al-Fateha Dua 2 Al-Bakarah Verse 1-5Naz SamОценок пока нет
- Crown Notes 2017Документ28 страницCrown Notes 2017Adil MushtaqueОценок пока нет
- Expp 10Документ4 страницыExpp 10ANUSAYA SAHUОценок пока нет
- RKDF University CSE SyllabusДокумент51 страницаRKDF University CSE Syllabusparitosh82Оценок пока нет
- Intel Family ProcessorДокумент10 страницIntel Family ProcessorWinterLopezIIОценок пока нет
- EazyDraw ManualДокумент424 страницыEazyDraw ManualAndrea MoranoОценок пока нет
- Architecang and Sizing Your Splunk Deployment: Simeon YepДокумент47 страницArchitecang and Sizing Your Splunk Deployment: Simeon YepSecurisq NetworksОценок пока нет
- 8086 Min Max Mode Operations ModifiedДокумент78 страниц8086 Min Max Mode Operations ModifiedRitu RathiОценок пока нет
- Oracle Monster Virtual Machine Performance: Vmware Vsphere 6.5Документ11 страницOracle Monster Virtual Machine Performance: Vmware Vsphere 6.5Bla bla blaОценок пока нет
- 8086 QuestionsДокумент7 страниц8086 QuestionsKuntalMukherjeeОценок пока нет
- CLAD Sample Exam 2Документ31 страницаCLAD Sample Exam 2Srinu KanekalОценок пока нет
- FS20 Fire Detection System: Commissioning Maintenance TroubleshootingДокумент188 страницFS20 Fire Detection System: Commissioning Maintenance TroubleshootingtapiaОценок пока нет
- History of ComputersДокумент118 страницHistory of ComputersDima BurkovichОценок пока нет
- Chapter04 ProcessorДокумент209 страницChapter04 ProcessorAbdul ThowfeeqОценок пока нет
- ASM 8085 Cheat Sheet: by ViaДокумент1 страницаASM 8085 Cheat Sheet: by Viaaziz ahmadОценок пока нет
- X-Plane Installer LogДокумент2 страницыX-Plane Installer LogAugusto GabrielОценок пока нет
- Microprogrammed Control UnitДокумент26 страницMicroprogrammed Control UnitxzОценок пока нет
- Atmel 11121S 32 Bit Cortex A5 Microcontroller SAMA5D3 Summary DatasheetДокумент22 страницыAtmel 11121S 32 Bit Cortex A5 Microcontroller SAMA5D3 Summary DatasheetbibloiОценок пока нет
- 3: Assembly Language: SEE 3223 Microprocessor SystemsДокумент41 страница3: Assembly Language: SEE 3223 Microprocessor SystemsanujОценок пока нет
- RTL Design and VLSI Implementation of An Efficient Convolutional Encoder and Adaptive Viterbi DecoderДокумент3 страницыRTL Design and VLSI Implementation of An Efficient Convolutional Encoder and Adaptive Viterbi DecoderNsrc Nano ScientifcОценок пока нет
- 8051 Microcontroller - Architecture, Intro To Assembly ProgrammingДокумент20 страниц8051 Microcontroller - Architecture, Intro To Assembly ProgrammingrkshnОценок пока нет
- The JASP Toolkit: A P P E N D I XДокумент36 страницThe JASP Toolkit: A P P E N D I XoracleappshrmsОценок пока нет
- ECC3105 Microprocessor Lab 1: ObjectivesДокумент11 страницECC3105 Microprocessor Lab 1: ObjectivesvitileeОценок пока нет
- Gateway Prosoft Modbus To Profibus DPДокумент245 страницGateway Prosoft Modbus To Profibus DPHavier RomeroОценок пока нет
- Requerimient Os Cinema 4DДокумент3 страницыRequerimient Os Cinema 4DABDISRZОценок пока нет
- Doble Prime Idd - Data SheetДокумент2 страницыDoble Prime Idd - Data SheetHiro ItoОценок пока нет
- 2022-23 Coa Course File FinalДокумент163 страницы2022-23 Coa Course File FinalDr. BRINDHA 2369Оценок пока нет
- CPU 4upДокумент4 страницыCPU 4upLatifah MamatОценок пока нет
- Plugin 554 Mechatronics A MicroprocessorДокумент6 страницPlugin 554 Mechatronics A MicroprocessorSudhindraHariharОценок пока нет
- Minimum and Maximum Modes of 8086Документ3 страницыMinimum and Maximum Modes of 8086Riya Chaudhary100% (1)
- Lec 03-Introduction To 8085 Instruction SetДокумент32 страницыLec 03-Introduction To 8085 Instruction SetYaser Ahmed100% (1)