Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- DSP by Avatar Singh PDFДокумент355 страницDSP by Avatar Singh PDFaravind_elec565479% (14)
- DSP Ebook SalivahanДокумент939 страницDSP Ebook SalivahanChandan Kumar Choubey100% (1)
- DSP Lab Manual For ECE 3 2 R09Документ147 страницDSP Lab Manual For ECE 3 2 R09Jandfor Tansfg Errott100% (2)
- Signals & Systems Lab ManualДокумент63 страницыSignals & Systems Lab ManualDhadrmender Nishad100% (1)
- Stein J.Y. Digital Signal Processing - A Computer Science Perspective (Wiley, 2000) (T) (869s)Документ869 страницStein J.Y. Digital Signal Processing - A Computer Science Perspective (Wiley, 2000) (T) (869s)joseivanmu100% (1)
- Semiconductor Manufacturing Technology: OxidationДокумент50 страницSemiconductor Manufacturing Technology: Oxidationboulainine houriaОценок пока нет
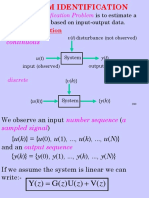
- Continuous: System Identification ProblemДокумент41 страницаContinuous: System Identification Problemboulainine houriaОценок пока нет
- Semiconductor Manufacturing Technology: OxidationДокумент50 страницSemiconductor Manufacturing Technology: Oxidationboulainine houriaОценок пока нет
- Continuous: System Identification ProblemДокумент41 страницаContinuous: System Identification Problemboulainine houriaОценок пока нет
- Digital Signal Processing: Electrical Engineering Department Iran University of Science & TechДокумент40 страницDigital Signal Processing: Electrical Engineering Department Iran University of Science & Techboulainine houriaОценок пока нет
- Finite Impulse Response FiltersДокумент24 страницыFinite Impulse Response Filtersboulainine houriaОценок пока нет
- DTFT PropertiesДокумент53 страницыDTFT Propertiesboulainine houriaОценок пока нет
- Basic IIR Digital Filter StructuresДокумент69 страницBasic IIR Digital Filter Structuresboulainine houriaОценок пока нет
- Chap6-Digital Filter StructuresДокумент11 страницChap6-Digital Filter Structuresboulainine houriaОценок пока нет
- Lecture 3: March 6, 2007: TopicДокумент37 страницLecture 3: March 6, 2007: Topicboulainine houriaОценок пока нет
- Unit 1 Introduction To Digital Signal ProcessingДокумент15 страницUnit 1 Introduction To Digital Signal ProcessingPreetham SaigalОценок пока нет
- Smartstix: Analog Input ModuleДокумент10 страницSmartstix: Analog Input Modulecucu77Оценок пока нет
- Lecture 4Документ55 страницLecture 4Mass NuzulОценок пока нет
- DSP Cours V2 PDFДокумент90 страницDSP Cours V2 PDFHamza SmahriОценок пока нет
- BAMU, Aurangabad PDFДокумент62 страницыBAMU, Aurangabad PDFJay ParkheОценок пока нет
- Communication SystemsДокумент58 страницCommunication SystemsManikandan SambanthamОценок пока нет
- Design of Equiripple FIR Filters Using Multiple Exchange AlgorithmДокумент34 страницыDesign of Equiripple FIR Filters Using Multiple Exchange AlgorithmPatel IbrahimОценок пока нет
- High-Tech Range: IRI1-WD - Overcurrent, Short-Circuit and Earth Fault RelayДокумент12 страницHigh-Tech Range: IRI1-WD - Overcurrent, Short-Circuit and Earth Fault RelayAman DeepОценок пока нет
- MDSP 1Документ48 страницMDSP 1Soundarya SvsОценок пока нет
- System Identification Using MATLABДокумент37 страницSystem Identification Using MATLABMarwan Elmahdi89% (9)
- Finite and Infinite Response Design FilterДокумент16 страницFinite and Infinite Response Design FilterLUIS ROBERTO PONTILLAS. SOLIMANОценок пока нет
- IR Sensor Thermometer MLX90614 Datasheet Download Link 5152Документ49 страницIR Sensor Thermometer MLX90614 Datasheet Download Link 5152Enderson PeraltaОценок пока нет
- Physiological Computing Gaming - Use of Electrocardiogram As An Input For Video GamingДокумент8 страницPhysiological Computing Gaming - Use of Electrocardiogram As An Input For Video GamingDaniel MedroomОценок пока нет
- AE306 Digital Signal ProcessingДокумент2 страницыAE306 Digital Signal ProcessingjaikeОценок пока нет
- MTech Mobile Pervasive Computing 2017Документ68 страницMTech Mobile Pervasive Computing 2017ella palomaОценок пока нет
- Iir 1Документ55 страницIir 1Joyita BiswasОценок пока нет
- Academic Handbook of MITДокумент170 страницAcademic Handbook of MITVibhav PawarОценок пока нет
- Signals and Systems - MjrobertsДокумент3 страницыSignals and Systems - Mjrobertspriyakanthr5883100% (1)
- Improved Line Voltage Zero-Crossing Detection Techniques For PV InvertersДокумент6 страницImproved Line Voltage Zero-Crossing Detection Techniques For PV InvertersJAHANGEER AHMADОценок пока нет
- CS2403 DSPДокумент47 страницCS2403 DSPkar12345aravind100% (1)
- Thesis On Adaptive FilterДокумент10 страницThesis On Adaptive Filtershannongutierrezcorpuschristi100% (2)
- Two-Stage-Based Polyphase Structures For Arbitrary-Integer Sampling Rate ConversionДокумент5 страницTwo-Stage-Based Polyphase Structures For Arbitrary-Integer Sampling Rate ConversionAnju BalaОценок пока нет
- ECC15: Digital Signal ProcessingДокумент7 страницECC15: Digital Signal ProcessingPragyadityaОценок пока нет