Вам также может понравиться
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesОт EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesОценок пока нет
- Mathematical Models of Control SystemsДокумент37 страницMathematical Models of Control SystemsmorilloatilioОценок пока нет
- LaplaceДокумент22 страницыLaplaceKomal SinghОценок пока нет
- Math4 170513085146Документ47 страницMath4 170513085146jucar fernandezОценок пока нет
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformДокумент30 страницLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainОценок пока нет
- Laplace Transforms: Spsu Mathematics DepartmentДокумент37 страницLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiОценок пока нет
- Laplace Transform-1Документ29 страницLaplace Transform-1JatraОценок пока нет
- Chapter 3: Dynamic ResponseДокумент78 страницChapter 3: Dynamic ResponseAhmedSalahОценок пока нет
- Laplace Transforms and Its Applications: Unit-IiiДокумент68 страницLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanОценок пока нет
- Laplace Transforms1Документ81 страницаLaplace Transforms1arunkumar SОценок пока нет
- IE474 Summer2022 Nise Ch2 PartA PDFДокумент33 страницыIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoОценок пока нет
- Laplace TransformsДокумент81 страницаLaplace TransformsChristopher OrtegaОценок пока нет
- Laplace Transforms1Документ81 страницаLaplace Transforms1MoslemaWaftakherОценок пока нет
- Control SystemДокумент45 страницControl SystemKelvin KongОценок пока нет
- Lec1 DR MohamedДокумент25 страницLec1 DR MohamedmmaherОценок пока нет
- Ch15 - Laplace Transforms IДокумент45 страницCh15 - Laplace Transforms IdadsdОценок пока нет
- Chapter (1) Laplace TransformДокумент28 страницChapter (1) Laplace TransformMohammed NabilОценок пока нет
- AEM Chapter04 Lplace TransformДокумент53 страницыAEM Chapter04 Lplace TransformAchmad FauziОценок пока нет
- Blake Problem ComputationДокумент42 страницыBlake Problem ComputationAnonymous pS4LT2GJUSОценок пока нет
- Lecture 2: Laplace TransformДокумент58 страницLecture 2: Laplace TransformheroОценок пока нет
- Process Control 7Документ45 страницProcess Control 7ali AbbasОценок пока нет
- Introduction To Laplace TransformsДокумент32 страницыIntroduction To Laplace TransformsAd Man GeTigОценок пока нет
- Laplace HadyДокумент52 страницыLaplace HadyT AОценок пока нет
- Laplace TransformДокумент20 страницLaplace TransformAHMAD FIRDAUS WAJDIОценок пока нет
- Lesson #2 Lecture #1 Review of Laplace TransformДокумент16 страницLesson #2 Lecture #1 Review of Laplace TransformShazidОценок пока нет
- Bab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceДокумент31 страницаBab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceRizqi Cahyo M PutraОценок пока нет
- Chapter56 Laplace&TFДокумент106 страницChapter56 Laplace&TFfebri setyawanОценок пока нет
- Chapter 6 PPT Slides vs3Документ22 страницыChapter 6 PPT Slides vs3Sherif Aly100% (1)
- Chapter 7Документ75 страницChapter 7narains81Оценок пока нет
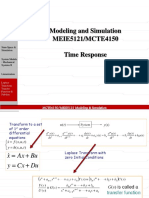
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseДокумент31 страницаModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaОценок пока нет
- Laplace Transform: Dr. Ajay Singh RaghuvanshiДокумент66 страницLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarОценок пока нет
- Midterm Study ProblemДокумент4 страницыMidterm Study ProblemTehe SaglamОценок пока нет
- Presentation On Laplace TransformsДокумент36 страницPresentation On Laplace TransformsRahul SinghОценок пока нет
- 5 - Laplace TransformДокумент58 страниц5 - Laplace TransformutpОценок пока нет
- Laplace TransformДокумент37 страницLaplace TransformAMIE Study Circle, RoorkeeОценок пока нет
- Introduction To Laplace TransformsДокумент47 страницIntroduction To Laplace TransformsTalha MazharОценок пока нет
- Automatics and Automatic ControlДокумент33 страницыAutomatics and Automatic ControlaliОценок пока нет
- Laplace Transform (Updated 2018)Документ29 страницLaplace Transform (Updated 2018)Mohamad DuhokiОценок пока нет
- Module 2 Laplace TransformДокумент13 страницModule 2 Laplace TransformJohnnette AggabaoОценок пока нет
- Laplace Circuit AnalysisДокумент41 страницаLaplace Circuit AnalysishibaОценок пока нет
- 2-Mathematical Models of SystemsДокумент42 страницы2-Mathematical Models of SystemsKeiko AzizahОценок пока нет
- 02 Chapter 02Документ60 страниц02 Chapter 02Get CubeloОценок пока нет
- Laplace TransformДокумент95 страницLaplace Transformkac2872Оценок пока нет
- Lec - 3-4 - Transfer Function and Laplace TransformДокумент54 страницыLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiОценок пока нет
- Unit-Vi: Mathematics-II (7HC16)Документ32 страницыUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaОценок пока нет
- 4 - Laplace TransformДокумент56 страниц4 - Laplace TransformHasrul HishamОценок пока нет
- Excellent Does Not An Accident, But It Comes Through A Hard Work!!Документ108 страницExcellent Does Not An Accident, But It Comes Through A Hard Work!!muhd munzirОценок пока нет
- Ee202laplacetransform PDFДокумент85 страницEe202laplacetransform PDFFairusabdrОценок пока нет
- 27 Introduction To Laplace TransformsДокумент21 страница27 Introduction To Laplace TransformsSadek AhmedОценок пока нет
- 27 Introduction To Laplace TransformsДокумент21 страница27 Introduction To Laplace TransformsSadek AhmedОценок пока нет
- Laplace and Inverse Laplace TransformДокумент96 страницLaplace and Inverse Laplace Transformgtewszc123Оценок пока нет
- Laplace Transform Review: ExampleДокумент3 страницыLaplace Transform Review: ExampleSandhyaОценок пока нет
- Laplace HadyДокумент50 страницLaplace HadyIhwan FauziОценок пока нет
- Laplace FormulaДокумент16 страницLaplace Formulashubh.fincherОценок пока нет
- Laplace Transform: BIOE 4200Документ23 страницыLaplace Transform: BIOE 4200vasu_koneti5124Оценок пока нет
- Laplace1a PDFДокумент74 страницыLaplace1a PDFRenaltha Puja BagaskaraОценок пока нет
- Second Order Differential Equation: Laplace Transform - Inverse Laplace TransformДокумент8 страницSecond Order Differential Equation: Laplace Transform - Inverse Laplace TransformThevhan MurallyОценок пока нет
- Matematika Teknik Kimia 1: Jurusan Teknik Kimia Fakultas Teknik Universitas Negeri SemarangДокумент47 страницMatematika Teknik Kimia 1: Jurusan Teknik Kimia Fakultas Teknik Universitas Negeri SemarangSyauqi IlmiОценок пока нет
- LaplaceДокумент19 страницLaplaceMadhurya SharmaОценок пока нет
- Modeling in Time DomainДокумент30 страницModeling in Time Domainfarouq_razzaz2574Оценок пока нет
- Nota Chapter 3 ForceДокумент27 страницNota Chapter 3 ForceRadhi MusaОценок пока нет
- Chapter 3 Force Engineering Science E-BookДокумент45 страницChapter 3 Force Engineering Science E-BookRadhi Musa100% (1)
- Arahan: Sila Jawab EMPAT (4) Soalan Daripada ENAM (6) Soalan. Instruction: Answer FOUR (4) Questions From SIX (6) Questions. Soalan 1Документ12 страницArahan: Sila Jawab EMPAT (4) Soalan Daripada ENAM (6) Soalan. Instruction: Answer FOUR (4) Questions From SIX (6) Questions. Soalan 1Radhi MusaОценок пока нет
- Arahan: Sila Jawab EMPAT (4) Soalan Daripada ENAM (6) Soalan. Instruction: Answer FOUR (4) Questions From SIX (6) QuestionsДокумент11 страницArahan: Sila Jawab EMPAT (4) Soalan Daripada ENAM (6) Soalan. Instruction: Answer FOUR (4) Questions From SIX (6) QuestionsRadhi MusaОценок пока нет
- Big Five Personality TestДокумент3 страницыBig Five Personality TestRadhi MusaОценок пока нет
- Final Year ReportДокумент71 страницаFinal Year ReportRadhi Musa100% (3)
- 10-Emergency Preparedness and ResponseREVISEDДокумент56 страниц10-Emergency Preparedness and ResponseREVISEDRadhi Musa100% (3)
- Skill of Understanding Meaning and Motive in Another's Words, A Considerably Powerful AbilityДокумент24 страницыSkill of Understanding Meaning and Motive in Another's Words, A Considerably Powerful AbilityRadhi MusaОценок пока нет
- Skill of Understanding Meaning and Motive in Another's Words, A Considerably Powerful AbilityДокумент24 страницыSkill of Understanding Meaning and Motive in Another's Words, A Considerably Powerful AbilityRadhi MusaОценок пока нет
- 2019 All PDFДокумент27 страниц2019 All PDFvishesh bhatiaОценок пока нет
- Ism CodeДокумент9 страницIsm CodePraneel KurhadeОценок пока нет
- Crankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsДокумент6 страницCrankshaft Position (CKP) Sensor: 1F2-12 M161 Engine ControlsKukuh SeptiantoОценок пока нет
- SIM BoxingДокумент2 страницыSIM Boxingkrishnakant_75Оценок пока нет
- Programming Bayes Rule OptionalДокумент17 страницProgramming Bayes Rule OptionalajuhaseenОценок пока нет
- Turbin 1Документ27 страницTurbin 1Durjoy Chakraborty100% (1)
- Esquema Elétrico NGD 9.3Документ2 страницыEsquema Elétrico NGD 9.3LuisCarlosKovalchuk100% (1)
- Educational Solutions From Schneider ElectricДокумент164 страницыEducational Solutions From Schneider ElectricfaneeeeeeОценок пока нет
- C12200Документ3 страницыC12200xgiorg100% (1)
- HighpuritysealsДокумент6 страницHighpuritysealstuannhocutОценок пока нет
- AirStash Manual A01 PDFДокумент15 страницAirStash Manual A01 PDFArcangelo Di TanoОценок пока нет
- Acceleration GrpahДокумент14 страницAcceleration GrpahRAFAEL TORRESОценок пока нет
- 701.ssvseat 1.04Документ2 страницы701.ssvseat 1.04Cosmin MuscaluОценок пока нет
- Le22a1321 AocДокумент130 страницLe22a1321 AocEchefisEchefisОценок пока нет
- Intermec CS40 SpecsДокумент8 страницIntermec CS40 Specsss1222Оценок пока нет
- Estimation Software For Presure VesselДокумент36 страницEstimation Software For Presure VesselKarthikeyan Shanmugavel0% (1)
- Vibro SifterДокумент7 страницVibro SifterDIpesh SahooОценок пока нет
- TechSpec MistralДокумент4 страницыTechSpec MistralScarab SweepersОценок пока нет
- IBM System Storage DS8000 - A QuickДокумент10 страницIBM System Storage DS8000 - A Quickmuruggan_aОценок пока нет
- Woodworking Plans - Wheelbarrow PlanterДокумент3 страницыWoodworking Plans - Wheelbarrow PlanterMirel HotescuОценок пока нет
- Report On Automatic Phase Changer: Submitted ByДокумент32 страницыReport On Automatic Phase Changer: Submitted ByAndrea JohnsonОценок пока нет
- Simatic EKB Install 2012-03-08Документ2 страницыSimatic EKB Install 2012-03-08Oton SilvaОценок пока нет
- Nuevo CvuДокумент1 страницаNuevo CvuJesús GonzálezОценок пока нет
- ITP InstrumentationДокумент9 страницITP InstrumentationzhangyiliОценок пока нет
- Build-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACДокумент18 страницBuild-A-Bard ABB - RFQ-807683Reaprovechamiento Relaves - SR For Cotejado 010A - HVACchristianОценок пока нет
- NBN Co: Financial Management SolutionДокумент2 страницыNBN Co: Financial Management SolutionAccentureAustraliaОценок пока нет
- Comparative Tracking Index of Electrical Insulating MaterialsДокумент6 страницComparative Tracking Index of Electrical Insulating MaterialsAbu Anas M.SalaheldinОценок пока нет
- Mechanical Workshop Practice ReportДокумент6 страницMechanical Workshop Practice ReportMuhd AkmalОценок пока нет
- Applying Six Sigma at 3MДокумент13 страницApplying Six Sigma at 3MdchОценок пока нет
- SemДокумент31 страницаSemkaushik4208Оценок пока нет