Вам также может понравиться
- Mantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209От EverandMantenimiento de redes eléctricas aéreas de alta tensión. ELEE0209Оценок пока нет
- Laboratorio de Sistemas de Control (Laboratorio 1 Control Manual) - O813 Coscorrosa Riveros Rondon SaezДокумент11 страницLaboratorio de Sistemas de Control (Laboratorio 1 Control Manual) - O813 Coscorrosa Riveros Rondon SaezRicardo RondonОценок пока нет
- Jesus Alejandro RTTTДокумент9 страницJesus Alejandro RTTTDaniel RamirezОценок пока нет
- Teoría de Control y RobóticaДокумент6 страницTeoría de Control y RobóticaRicardo Páramo BernalОценок пока нет
- Controlador PIDДокумент27 страницControlador PIDesanz2800Оценок пока нет
- ManriqueДокумент6 страницManriqueJose Yair Chuc ZapataОценок пока нет
- Practica PIDДокумент13 страницPractica PIDMartín SilvestreОценок пока нет
- Técnicas de Diseño de ControladoresДокумент4 страницыTécnicas de Diseño de ControladoresJavier OrtizОценок пока нет
- Practica 5 Sintonía de Los ControladoresДокумент29 страницPractica 5 Sintonía de Los ControladoresJaneth ReyesОценок пока нет
- Formato - Laboratorio Sistemas de Control Practica 2Документ14 страницFormato - Laboratorio Sistemas de Control Practica 2Alexander UribeОценок пока нет
- Laboratorio Control Velocidad Motor DC 2Документ8 страницLaboratorio Control Velocidad Motor DC 2carlosquinteОценок пока нет
- Control PidДокумент18 страницControl PidMartha Lozada NavarroОценок пока нет
- Trabajo Teoria de Control (1) (Recuperado)Документ20 страницTrabajo Teoria de Control (1) (Recuperado)carlosОценок пока нет
- Control PIDДокумент6 страницControl PIDFrânçïsçô DâvïdОценок пока нет
- Controlador Pid de Un Circuito RLC en SerieДокумент7 страницControlador Pid de Un Circuito RLC en SerieMarisol Tancara RoqueОценок пока нет
- Sistemas de Control PidДокумент17 страницSistemas de Control PidJhonatan LeonОценок пока нет
- Informe Variador de FrecuenciaДокумент12 страницInforme Variador de FrecuenciaGabriel PumasuntaОценок пока нет
- Informe Sistemas de Control 4Документ15 страницInforme Sistemas de Control 4Gamer AllianceОценок пока нет
- Cuestionario para ExamenДокумент9 страницCuestionario para ExamenJesus Jaime BaezОценок пока нет
- Ingeniería de Control IdДокумент27 страницIngeniería de Control IdRony Ynoquio RosalesОценок пока нет
- Automatizacion Actividad 1 Lapso 2Документ13 страницAutomatizacion Actividad 1 Lapso 2Luiggi Josue ViloriaОценок пока нет
- Practica 1 Tercer Parcial PID AnalogicoДокумент14 страницPractica 1 Tercer Parcial PID AnalogicoDiego MartinezОценок пока нет
- Análisis Del Comportamiento Dinámico de Controladores Pid en Diferentes ConfiguracionesДокумент7 страницAnálisis Del Comportamiento Dinámico de Controladores Pid en Diferentes ConfiguracionesAlexander Plata UscateguiОценок пока нет
- Diseño de Sistemas de ControlДокумент8 страницDiseño de Sistemas de ControlAdrian CifuentesОценок пока нет
- Controlador PID Jose Rodriguez 26146433Документ5 страницControlador PID Jose Rodriguez 26146433Yuliannys RondonОценок пока нет
- CPI2 Examen UF3Документ2 страницыCPI2 Examen UF3acajahuaringaОценок пока нет
- Controlador PIDДокумент5 страницControlador PIDAlfredo TepanОценок пока нет
- ControladoresДокумент19 страницControladoresJesús L Reina BОценок пока нет
- Unidad 1 Ra EduardoДокумент8 страницUnidad 1 Ra EduardoEduardo UlloaОценок пока нет
- Unidad 3 Instrumentacion y ControlДокумент13 страницUnidad 3 Instrumentacion y Controlanon_371233516Оценок пока нет
- Actividad 1. Simulación y Control Automático de Procesos (Conceptos Básicos)Документ7 страницActividad 1. Simulación y Control Automático de Procesos (Conceptos Básicos)Luisa Rodriguez BarragánОценок пока нет
- ControlДокумент26 страницControlAndres Sebastian Gonzalez CastañedaОценок пока нет
- Diagramas de Lazo Abierto y CerradoДокумент3 страницыDiagramas de Lazo Abierto y CerradoJorge GarcíaОценок пока нет
- Quiz Final Nicolas RojasДокумент3 страницыQuiz Final Nicolas RojasDeybi Jimenes R Jimenes RОценок пока нет
- Elementos de Un Sistema de ControlДокумент4 страницыElementos de Un Sistema de ControlskailarkkkОценок пока нет
- Pautas de ControlДокумент6 страницPautas de ControlRandy Laos NolazcoОценок пока нет
- Informe I - UNMSM - SCII - MANDUJANOДокумент12 страницInforme I - UNMSM - SCII - MANDUJANOAmerico MedinaОценок пока нет
- Informe 3 ControlДокумент4 страницыInforme 3 ControlAndres DavidОценок пока нет
- Control de Posicion de Un Motor DCДокумент10 страницControl de Posicion de Un Motor DCCADILLO VILLANUEVA ALONSOОценок пока нет
- Práctica 3.: Controlador PidДокумент11 страницPráctica 3.: Controlador PidEscuadrón RasacОценок пока нет
- Tarea2 Cuestionario Control On-OffДокумент8 страницTarea2 Cuestionario Control On-OffYamil JuarezОценок пока нет
- Preguntas de ControlДокумент5 страницPreguntas de ControlRicardo Zaoldyeck Tapia Robledo100% (2)
- Laboratorio de Sistemas de Control (Laboratorio 6 Control Automatico de Nivel en Lazo Cerrado) - O813 Coscorrosa Riveros Rondon SaezДокумент16 страницLaboratorio de Sistemas de Control (Laboratorio 6 Control Automatico de Nivel en Lazo Cerrado) - O813 Coscorrosa Riveros Rondon SaezRicardo RondonОценок пока нет
- Pid ScadaДокумент13 страницPid ScadaDarwin GarciaОценок пока нет
- 01 Resumen Automatismos2Документ4 страницы01 Resumen Automatismos2Williams FernandezОценок пока нет
- Control PIDДокумент65 страницControl PIDChristian OqОценок пока нет
- Lab 10 PLCДокумент12 страницLab 10 PLCBrando Collado ChuctayaОценок пока нет
- Control de Velocidad de Un Motor DCДокумент7 страницControl de Velocidad de Un Motor DCFreddy Lp RoblesОценок пока нет
- PID Posicion Usando Una FPGAДокумент6 страницPID Posicion Usando Una FPGALopez Mercado IvanОценок пока нет
- Controladores PDFДокумент2 страницыControladores PDFIVAN DARIO PARRA GUZMANОценок пока нет
- Sistema Realimentado Con Pid PDFДокумент17 страницSistema Realimentado Con Pid PDFCesarLavadoОценок пока нет
- Tarea2 Cuestionario Control On-Off PDFДокумент8 страницTarea2 Cuestionario Control On-Off PDFYamil JuarezОценок пока нет
- Control Instrumentacion Procesos-BalotarioДокумент30 страницControl Instrumentacion Procesos-BalotarioKevinEricksonSilvaIsidroОценок пока нет
- L04-Guia Laboratorio 4Документ18 страницL04-Guia Laboratorio 4Brian Matute OrtizОценок пока нет
- 33 Control IiДокумент14 страниц33 Control IiPt farrgiОценок пока нет
- Informe LDRДокумент19 страницInforme LDRJuan Carlos ValenciaОценок пока нет
- Practica 8 LABO DE TEORIA DE CONTROL UNAMДокумент14 страницPractica 8 LABO DE TEORIA DE CONTROL UNAMMiguel GuerreroОценок пока нет
- Reporte PidДокумент4 страницыReporte PidReynaldo CasillasОценок пока нет
- Banco de Preguntas Control AutomáticoДокумент12 страницBanco de Preguntas Control AutomáticoFabio CárdenasОценок пока нет
- Unidad 3 Antropología 2Документ14 страницUnidad 3 Antropología 2domingoОценок пока нет
- Aparatos de Medicion MetrologiaДокумент4 страницыAparatos de Medicion MetrologiadomingoОценок пока нет
- Lo "Normal" y Lo "Anormal" en El SexoДокумент1 страницаLo "Normal" y Lo "Anormal" en El SexodomingoОценок пока нет
- Afrontamiento y Adaptacion Al Proceso de Envejecimiento Chiqui - Cruz - Ayde - VilmaДокумент73 страницыAfrontamiento y Adaptacion Al Proceso de Envejecimiento Chiqui - Cruz - Ayde - VilmadomingoОценок пока нет
- Teoria de Los Rasgos de Personalidad de Self de Gordon AllportДокумент1 страницаTeoria de Los Rasgos de Personalidad de Self de Gordon Allportdomingo50% (2)
- Unidad 3 2 3.1 Estructura Formal Del Documento Acorde Alineamiento EstablecidosДокумент16 страницUnidad 3 2 3.1 Estructura Formal Del Documento Acorde Alineamiento Establecidosdomingo95% (19)
- Teoria y Tecnica de La EntrevistaДокумент21 страницаTeoria y Tecnica de La EntrevistadomingoОценок пока нет
- Mecánica de Los MaterialesДокумент4 страницыMecánica de Los MaterialesdomingoОценок пока нет
- Mecanica de FluidoДокумент8 страницMecanica de FluidodomingoОценок пока нет
- Unidad 1 Tipos de InvestigacionДокумент11 страницUnidad 1 Tipos de InvestigaciondomingoОценок пока нет
- 3.1.analisis Del Servicio o ProductoДокумент22 страницы3.1.analisis Del Servicio o Productodomingo0% (1)
- Exposicion de No PermanenteДокумент11 страницExposicion de No PermanentedomingoОценок пока нет
- Equipos Secundarios y de ProtecciónДокумент28 страницEquipos Secundarios y de ProteccióndomingoОценок пока нет
- Invernadero Rural para La Producción de Jitomates en El Estado de TabascoДокумент6 страницInvernadero Rural para La Producción de Jitomates en El Estado de TabascodomingoОценок пока нет
- Elementos de en Subestaciones EléctricasДокумент13 страницElementos de en Subestaciones Eléctricasdomingo100% (1)
- Protecciones EspecialesДокумент16 страницProtecciones Especialesdomingo100% (4)
- Aspectos Fundamentales de Una Auditoria EnergéticaДокумент2 страницыAspectos Fundamentales de Una Auditoria Energéticadomingo50% (2)
- Esmkt02023b16 Cap5Документ92 страницыEsmkt02023b16 Cap5Peli JorroОценок пока нет
- GuiaVirtualBond 3036878536 3036878536Документ1 страницаGuiaVirtualBond 3036878536 3036878536Bee Happy Apiario SASОценок пока нет
- El Manejo de La Computadora Xo MinisterioДокумент2 страницыEl Manejo de La Computadora Xo MinisterioRaul Callohuanca SanchezОценок пока нет
- Wire SharkДокумент45 страницWire SharkJudith Escobar ValenzuelaОценок пока нет
- La Nueva RadioДокумент2 страницыLa Nueva Radiodanielcurbelo8834Оценок пока нет
- Latinum InstruccionesДокумент8 страницLatinum Instruccionespmug0001Оценок пока нет
- My BookДокумент148 страницMy BookBelén Serra CajasОценок пока нет
- Jose Capmany Francoy, Francisco Javier Fraile-Pelaez, Javier Marti - Dispositivos de Comunicaciones Opticas-Sintesis Editorial (2000)Документ361 страницаJose Capmany Francoy, Francisco Javier Fraile-Pelaez, Javier Marti - Dispositivos de Comunicaciones Opticas-Sintesis Editorial (2000)Alex Junior Agreda SiguenzaОценок пока нет
- Cuestionario Derecho Informático II ParcialДокумент23 страницыCuestionario Derecho Informático II ParcialLuis OchoaОценок пока нет
- Puente Levadizo AutomatizadoДокумент4 страницыPuente Levadizo AutomatizadoJairo PascagazaОценок пока нет
- Tarea 03Документ5 страницTarea 03estefhany guzman rojasОценок пока нет
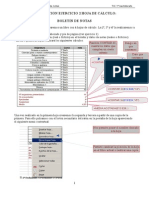
- Explicación Ejercicio 2 CalcДокумент4 страницыExplicación Ejercicio 2 CalcdavcasbraОценок пока нет
- Digitalización de Las PymesДокумент11 страницDigitalización de Las PymesJavier Z.Оценок пока нет
- Taller Respuestas A Preguntas Sobre Video La MetaДокумент2 страницыTaller Respuestas A Preguntas Sobre Video La MetaJuan David DiazgranadosОценок пока нет
- Fallas en La Transmisión Mecánica y AutomáticaДокумент15 страницFallas en La Transmisión Mecánica y Automáticajairopotato100% (1)
- ES - Manual de Servicio de LT-1650Документ108 страницES - Manual de Servicio de LT-1650Miguel RomoОценок пока нет
- Reutilización de FrecuenciasДокумент4 страницыReutilización de FrecuenciasNicolas Godoy MorenoОценок пока нет
- Manual LiquiLaser BASIC2 6040Документ27 страницManual LiquiLaser BASIC2 6040Pedro CataneseОценок пока нет
- Aplicación Que Simula El Protocolo Cuántico BB84Документ37 страницAplicación Que Simula El Protocolo Cuántico BB84espartanoxОценок пока нет
- Capacitacion Señalización VialДокумент21 страницаCapacitacion Señalización VialLuis Carlos Gutierrez Pedraza100% (1)
- Tipos de PeriféricosДокумент5 страницTipos de PeriféricosRicardo Ojeda Rojas67% (3)
- Fichas Semana 7Документ19 страницFichas Semana 7Dina LopezОценок пока нет
- Blockchain ExamenДокумент2 страницыBlockchain ExamencarlosОценок пока нет
- Práctica 4Документ7 страницPráctica 4Fernanda TorresОценок пока нет
- Portafolio Servicios Virtuales 20-01-2023Документ19 страницPortafolio Servicios Virtuales 20-01-2023Mathyas HappyОценок пока нет
- Unidad 2 - Tarea 3 - Comunicación y Colaboración en La WebДокумент13 страницUnidad 2 - Tarea 3 - Comunicación y Colaboración en La WebmargaritaОценок пока нет
- Informe Del Proyecto de Acondicionamiento de SeñalДокумент5 страницInforme Del Proyecto de Acondicionamiento de SeñalAlejandro Ozaeta EidelmanОценок пока нет
- Taller Practico 1 Minimizando Residuos PeligrososДокумент8 страницTaller Practico 1 Minimizando Residuos PeligrososANDRES CHAVEZОценок пока нет
- Computación 3° Primaria - I Bimestre Sesión I - 2023Документ8 страницComputación 3° Primaria - I Bimestre Sesión I - 2023Liz SuarezОценок пока нет
- Arbol Critico de La CalidadДокумент1 страницаArbol Critico de La CalidadAnahi TorranoОценок пока нет