Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Fault Code 599 Auxiliary Commanded Dual Output Shutdown - Special InstructionsДокумент2 страницыFault Code 599 Auxiliary Commanded Dual Output Shutdown - Special InstructionsAhmedmah100% (1)
- Combined Gas (Turbine) and Steam (Turbine) : (COGAS)Документ28 страницCombined Gas (Turbine) and Steam (Turbine) : (COGAS)scribdhas2006100% (1)
- Marshalling KioskДокумент4 страницыMarshalling KioskThant Zin100% (1)
- Li Fi TechnologyДокумент34 страницыLi Fi TechnologyAmit Kumar MauryaОценок пока нет
- Gas Manifolds CPДокумент1 страницаGas Manifolds CPscribdhas2006Оценок пока нет
- Revised Affinity LawsДокумент13 страницRevised Affinity Lawsscribdhas2006Оценок пока нет
- Greater Amman Water SCADA Project (GASS) - TECO GROUPДокумент2 страницыGreater Amman Water SCADA Project (GASS) - TECO GROUPscribdhas2006Оценок пока нет
- Treating Hard Water Using Water Softener or Antiscalant InjectionДокумент1 страницаTreating Hard Water Using Water Softener or Antiscalant Injectionscribdhas2006Оценок пока нет
- Mod 502 WДокумент2 страницыMod 502 Wscribdhas2006Оценок пока нет
- How To Correctly Size A Steam BoilerДокумент2 страницыHow To Correctly Size A Steam Boilerscribdhas2006Оценок пока нет
- Chlor 12Документ1 страницаChlor 12scribdhas2006Оценок пока нет
- Mod T202Документ2 страницыMod T202scribdhas2006Оценок пока нет
- Vacuum Regulator CPДокумент1 страницаVacuum Regulator CPscribdhas2006Оценок пока нет
- 3115C AДокумент2 страницы3115C Ascribdhas2006Оценок пока нет
- Gas Chlorination Equipment Series 3000Документ2 страницыGas Chlorination Equipment Series 3000hfguavitaОценок пока нет
- Data Boiler CFB PB#16Документ61 страницаData Boiler CFB PB#16scribdhas2006Оценок пока нет
- Mod 502 WДокумент2 страницыMod 502 Wscribdhas2006Оценок пока нет
- Nozzles 40kg - MetricДокумент1 страницаNozzles 40kg - Metricscribdhas2006Оценок пока нет
- AutoCAD Electrical Tips Tricks 0618 No2.Docx v2Документ5 страницAutoCAD Electrical Tips Tricks 0618 No2.Docx v2scribdhas2006Оценок пока нет
- WRAS Certificate EPDMДокумент1 страницаWRAS Certificate EPDMscribdhas2006Оценок пока нет
- WRAS Certificate EUROKOTEДокумент2 страницыWRAS Certificate EUROKOTEscribdhas2006Оценок пока нет
- Steel Tetra PakДокумент15 страницSteel Tetra Pakscribdhas2006Оценок пока нет
- TestДокумент1 страницаTestscribdhas2006Оценок пока нет
- WRAS Certificate 90-01Документ1 страницаWRAS Certificate 90-01scribdhas2006Оценок пока нет
- 4500 South Waterline Improvements Bid PackageДокумент1 страница4500 South Waterline Improvements Bid Packagescribdhas2006Оценок пока нет
- 4500 South Waterline Improvements Bid Package PDFДокумент291 страница4500 South Waterline Improvements Bid Package PDFscribdhas2006Оценок пока нет
- 2014.2.7 Rev.2 en Cleaning Method of JA Solar ModulesДокумент3 страницы2014.2.7 Rev.2 en Cleaning Method of JA Solar Modulesscribdhas2006Оценок пока нет
- 3.1B Certificat - ModèleДокумент1 страница3.1B Certificat - Modèlescribdhas2006Оценок пока нет
- Utility TurbinesДокумент67 страницUtility TurbinesBapu612345Оценок пока нет
- CCPPДокумент173 страницыCCPPscribdhas2006Оценок пока нет
- SAMSUNG SEM-3069E Compressor & Turbine Piping Design StandardДокумент124 страницыSAMSUNG SEM-3069E Compressor & Turbine Piping Design Standardscribdhas2006Оценок пока нет
- Pe Scaling PDFДокумент69 страницPe Scaling PDFscribdhas2006Оценок пока нет
- Appendix 7 - TOR ESCO Hot Charging PDFДокумент127 страницAppendix 7 - TOR ESCO Hot Charging PDFscribdhas2006Оценок пока нет
- EE124 Lecture 12 Source Follower Cascode Amplifier and Current Source Mar 9 Spring 2020 Annotated PDFДокумент13 страницEE124 Lecture 12 Source Follower Cascode Amplifier and Current Source Mar 9 Spring 2020 Annotated PDFSabeeq KarimОценок пока нет
- Electronic Circuit AnalysisДокумент7 страницElectronic Circuit AnalysisIshansi AgrawalОценок пока нет
- Gujarat Technological University: 1 Year, Subject Code: 3110018Документ4 страницыGujarat Technological University: 1 Year, Subject Code: 3110018saler71625Оценок пока нет
- PDF Sanken 882276Документ13 страницPDF Sanken 882276Moises CelosoОценок пока нет
- Artist Series: 1001RB-II/700RB-II Owner's ManualДокумент16 страницArtist Series: 1001RB-II/700RB-II Owner's ManualmaxОценок пока нет
- Electrical and Electronics EngineeringДокумент4 страницыElectrical and Electronics EngineeringPrithaBanerjeeОценок пока нет
- Product Overview: Data Sheet - H665GR GPON Gigabit ONT With Video ServiceДокумент7 страницProduct Overview: Data Sheet - H665GR GPON Gigabit ONT With Video ServiceTuấn minh DuongОценок пока нет
- DC Machines1.1 1Документ19 страницDC Machines1.1 1Janaka Chathuranga AbeywardenaОценок пока нет
- Design of Low Noise Amplifier For Microwave Circuits: July 2017Документ5 страницDesign of Low Noise Amplifier For Microwave Circuits: July 2017Jamal NasirОценок пока нет
- Release Note For IPASOLINK 08 May 2014Документ2 страницыRelease Note For IPASOLINK 08 May 2014Haytham Abdel-hadyОценок пока нет
- Electrical Installation Booklet Shipyard Standards: Marine Institute of Memorial University of NewfoundlandДокумент81 страницаElectrical Installation Booklet Shipyard Standards: Marine Institute of Memorial University of NewfoundlandHoangОценок пока нет
- Groundfos - SP 9-48Документ10 страницGroundfos - SP 9-48suwono radukОценок пока нет
- Crouse Hinds Eic Combination Starter BrochureДокумент8 страницCrouse Hinds Eic Combination Starter Brochurejvaldivia82Оценок пока нет
- NEC Article 728 Fire Resistive Cable Systems - No Concrete For Us We Are Fire RatedДокумент4 страницыNEC Article 728 Fire Resistive Cable Systems - No Concrete For Us We Are Fire Ratedthanna9783Оценок пока нет
- ORBIKДокумент96 страницORBIKNizarОценок пока нет
- EN Datasheet Copper SB RevCДокумент1 страницаEN Datasheet Copper SB RevCRoger Valenzuela HuamanОценок пока нет
- Jndal Power ResumeДокумент2 страницыJndal Power ResumeRahul Kumar YadavОценок пока нет
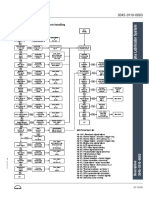
- 63 Sequence Diagram For Alarm HandlingДокумент1 страница63 Sequence Diagram For Alarm HandlingNick SkiadasОценок пока нет
- Agolar PCB Catalogue 2022-23Документ41 страницаAgolar PCB Catalogue 2022-23Karthikeyan .NОценок пока нет
- It8000 Indicator: Industrial Programmable Analog / Digital Controller, IP65Документ6 страницIt8000 Indicator: Industrial Programmable Analog / Digital Controller, IP65Leandro CamargoОценок пока нет
- GB38031-2020EN Electric Vehiles Traction Battery Safety RequerimentsДокумент15 страницGB38031-2020EN Electric Vehiles Traction Battery Safety RequerimentsMarianoОценок пока нет
- The Electrical Resistivity of Ultra-Thin Copper FilmsДокумент6 страницThe Electrical Resistivity of Ultra-Thin Copper FilmsJordan SantosОценок пока нет
- A Bridgeless Single-Stage Half-Bridge AC DC ConverterДокумент12 страницA Bridgeless Single-Stage Half-Bridge AC DC ConverterSaravana Prakash PОценок пока нет
- HT 306PD (sm-AFN75354522)Документ65 страницHT 306PD (sm-AFN75354522)Roberd MihailovОценок пока нет
- AN11740-PM5180 Antenna DesignДокумент62 страницыAN11740-PM5180 Antenna DesignTao TsaiОценок пока нет
- Pioneer PDP-S12-LR ManualДокумент40 страницPioneer PDP-S12-LR ManualAnonymous jnRlH5Оценок пока нет
- Qcells Installation Manual Q.PEAK DUO ML-G10.X Modules Series 2022-10 Rev04 ENДокумент13 страницQcells Installation Manual Q.PEAK DUO ML-G10.X Modules Series 2022-10 Rev04 ENMarko Maky ZivkovicОценок пока нет