Вам также может понравиться
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsОт EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsРейтинг: 5 из 5 звезд5/5 (1)
- Involute Spur GearДокумент7 страницInvolute Spur GeardhimanrayatОценок пока нет
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingОт EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingОценок пока нет
- Unit-5 Gears and Gear Trains: Guru Nanak Institute of TechnologyДокумент9 страницUnit-5 Gears and Gear Trains: Guru Nanak Institute of TechnologyKonduru Vinay Kumar ReddyОценок пока нет
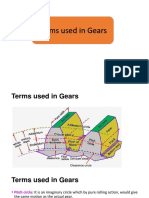
- Gear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceДокумент11 страницGear Terminology: Pitch Circle: Addendum Circle: Dedendum Circle: ClearanceFawad HassanОценок пока нет
- 06 GearsДокумент22 страницы06 GearsTeaching ClubОценок пока нет
- Chainsaw Carving for Beginners: Patterns and 250 Step-by-Step PhotosОт EverandChainsaw Carving for Beginners: Patterns and 250 Step-by-Step PhotosОценок пока нет
- GearsДокумент70 страницGearsJayesh NayakantiОценок пока нет
- Off-Road Welding: Advanced Techniques on How to Become a True Off-Road WelderОт EverandOff-Road Welding: Advanced Techniques on How to Become a True Off-Road WelderРейтинг: 5 из 5 звезд5/5 (2)
- Gear TerminologyДокумент21 страницаGear TerminologyAns ahmed100% (1)
- Gear Terms and DefinitionsДокумент5 страницGear Terms and DefinitionsAaron_Liu_1555Оценок пока нет
- Disston Lumberman Handbook - Containing A Treatise Of The Construction Of Saws And How To Keep Them In OrderОт EverandDisston Lumberman Handbook - Containing A Treatise Of The Construction Of Saws And How To Keep Them In OrderОценок пока нет
- Spur Gears: Pre-University Engineering Sciences Yr 2Документ20 страницSpur Gears: Pre-University Engineering Sciences Yr 2Jordan BrownОценок пока нет
- Gear NomenclatureДокумент41 страницаGear NomenclatureViswanathan SrkОценок пока нет
- Gear Geometry & Profile TheoryДокумент24 страницыGear Geometry & Profile Theoryansh1983100% (2)
- Gear and Gear TrainДокумент23 страницыGear and Gear TrainingridОценок пока нет
- Gears Nomenclature: by Feedback by Comments 1 MahekДокумент20 страницGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarОценок пока нет
- Gears Nomenclature: by Feedback by Comments 1 MahekДокумент20 страницGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarОценок пока нет
- Engineering Utilities 2 - GEARSДокумент35 страницEngineering Utilities 2 - GEARSDAGANATO, APPLE GRACE S.Оценок пока нет
- Ephrem Zeleke: Prepared byДокумент44 страницыEphrem Zeleke: Prepared bysamuel mechОценок пока нет
- Group 3 (Gears)Документ52 страницыGroup 3 (Gears)CherrydhelОценок пока нет
- Lecture Design of Spur GearДокумент97 страницLecture Design of Spur GearOwais Ahmad KhanОценок пока нет
- Gears PDFДокумент45 страницGears PDFSanmukh ShindeОценок пока нет
- GearsДокумент45 страницGearsSomendra Brijesh Pandey100% (1)
- GearsДокумент58 страницGearsapi-238832008100% (3)
- Gears: Syed Shaheer Uddin Ahmed Lecturer, MPEДокумент15 страницGears: Syed Shaheer Uddin Ahmed Lecturer, MPEimranОценок пока нет
- GearДокумент76 страницGearShahzeb AlamgirОценок пока нет
- GearДокумент19 страницGearArul DossОценок пока нет
- Gear TerminologyДокумент42 страницыGear Terminologyyair Enrique Romero OspinoОценок пока нет
- KDM UNIT-2 Gears - Gear TrainsДокумент11 страницKDM UNIT-2 Gears - Gear TrainsAchyuth KrishnaОценок пока нет
- Gears and Gear Drives!!Документ55 страницGears and Gear Drives!!Ishank Singh SandhuОценок пока нет
- Mael FinalsДокумент9 страницMael FinalsAtzu YuОценок пока нет
- Helicalgear 170104101849Документ9 страницHelicalgear 170104101849ChiragSMishra0% (1)
- GearsДокумент48 страницGearsIshrita SaxenaОценок пока нет
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Документ8 страницGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniОценок пока нет
- GearДокумент26 страницGearRadhika GandhiОценок пока нет
- Toothed GearingДокумент33 страницыToothed GearingpvkkrОценок пока нет
- Spur GearДокумент73 страницыSpur GearhaymanotОценок пока нет
- Introduction To Mechanisms: 7 GearsДокумент15 страницIntroduction To Mechanisms: 7 GearsDezert EagleОценок пока нет
- DVGДокумент53 страницыDVGbalajigandhirajanОценок пока нет
- Module4gears 190328033613Документ39 страницModule4gears 190328033613Obaid KhanОценок пока нет
- Gears TerminologyДокумент10 страницGears TerminologyJawad Ullah100% (2)
- Group 1 Gear, Contact Ratio, InterferenceДокумент52 страницыGroup 1 Gear, Contact Ratio, InterferenceAnthony FajardoОценок пока нет
- 202003291623595791prince Singh Spur GearДокумент10 страниц202003291623595791prince Singh Spur GearDARPAN BHARDWAJОценок пока нет
- Gears FundamentalДокумент25 страницGears FundamentalMOHD ZULHELMIE ZAINAL ABIDINОценок пока нет
- Introduction To Mechanisms: 7 GearsДокумент15 страницIntroduction To Mechanisms: 7 GearsgauravthamanОценок пока нет
- Terminology SpurДокумент3 страницыTerminology SpurNimish Pande100% (1)
- Gear Classification: Page - 1Документ12 страницGear Classification: Page - 1maloyОценок пока нет
- Design of Transmission Systems: Prepared by Dr.A.Vinoth JebarajДокумент148 страницDesign of Transmission Systems: Prepared by Dr.A.Vinoth Jebarajrishi raja RajaОценок пока нет
- ME324 Lecture5Документ66 страницME324 Lecture5Jam Maica TuboОценок пока нет
- Bevel GearДокумент9 страницBevel GearAadil KhanОценок пока нет
- Note On Gear BoxДокумент32 страницыNote On Gear BoxanupbagОценок пока нет
- Design of GearsДокумент94 страницыDesign of Gears60-Hafiz Muhammad AbdullahОценок пока нет
- Chapter 4-Gears and Gear TrainsДокумент93 страницыChapter 4-Gears and Gear TrainssahilrajpootasusОценок пока нет
- Module IV: Gears and Gear TrainsДокумент38 страницModule IV: Gears and Gear TrainsSuraj VinayОценок пока нет
- Gear LecturДокумент50 страницGear LecturMuralikrishnan GM100% (1)
- Gear Manufacturing 1Документ61 страницаGear Manufacturing 1Sajjad AbidОценок пока нет
- MECS - SyllabusДокумент3 страницыMECS - SyllabusRagunath PalanichamyОценок пока нет
- Vag Option CodesДокумент257 страницVag Option CodesLuk asОценок пока нет
- Empaneled BA ListДокумент1 страницаEmpaneled BA Listsarbajitsahoo8260Оценок пока нет
- 6 Bhel - Noida ElectricalДокумент9 страниц6 Bhel - Noida Electricaldeepti sharmaОценок пока нет
- Raxron CatalogДокумент153 страницыRaxron CatalogAcme TechОценок пока нет
- Thermal Pollution and Nuclear Hazards: College of Engineering, Architecture and TechnologyДокумент6 страницThermal Pollution and Nuclear Hazards: College of Engineering, Architecture and TechnologyFirst name Last nameОценок пока нет
- Trade Electrician: Syllabus Breakup DailyДокумент53 страницыTrade Electrician: Syllabus Breakup Dailygaurav kumar67% (3)
- PUF Panels in India - Leading ManufacturerДокумент2 страницыPUF Panels in India - Leading ManufacturerNikhil GuptaОценок пока нет
- ° To The Horizontal From A Point 80m Above A Level Plain. What Horizontal Distance Will It Cover Before It Strikes The Plain? AnsДокумент4 страницы° To The Horizontal From A Point 80m Above A Level Plain. What Horizontal Distance Will It Cover Before It Strikes The Plain? AnsClarence PortoОценок пока нет
- Topic 5 Heating Currents Paper 1Документ20 страницTopic 5 Heating Currents Paper 1felОценок пока нет
- Middle East Architect 201101Документ60 страницMiddle East Architect 201101hypercube002Оценок пока нет
- MOTORTECH InstructionLeaflet Hall Effect Pickup 66.60.043 L 01.12.044 EN 2020 11Документ2 страницыMOTORTECH InstructionLeaflet Hall Effect Pickup 66.60.043 L 01.12.044 EN 2020 11German E.Оценок пока нет
- MRU21F2AWWДокумент51 страницаMRU21F2AWWJorge RubenОценок пока нет
- Manual - Bateria - SE-G5.1 - SE-G5.1 PRO DeyeДокумент28 страницManual - Bateria - SE-G5.1 - SE-G5.1 PRO DeyeThiago C. de LimaОценок пока нет
- Ficha Tecnica XR6C-LEDДокумент4 страницыFicha Tecnica XR6C-LEDEfrain MateoОценок пока нет
- 785C - Apx LineasДокумент43 страницы785C - Apx LineasChema VenegasОценок пока нет
- Variable Primary Flow Systems: An Alternative Chilled Water System SolutionДокумент35 страницVariable Primary Flow Systems: An Alternative Chilled Water System Solutionquang stcОценок пока нет
- FPE Module 5Документ35 страницFPE Module 5RickОценок пока нет
- Cat Engine c23Документ15 страницCat Engine c23wuub wuugfgОценок пока нет
- 0 - IEC62933-2-1 BESS - TestesДокумент90 страниц0 - IEC62933-2-1 BESS - TestesPethra Brito100% (1)
- Vapor Compression Refrigeration Cycle: Reversed Carnot Cycle (I.e. Carnot Cycle For Refrigeration Cycle)Документ24 страницыVapor Compression Refrigeration Cycle: Reversed Carnot Cycle (I.e. Carnot Cycle For Refrigeration Cycle)Prince NeoОценок пока нет
- Market Monitor Eu Jan To Mar23 Jun23Документ7 страницMarket Monitor Eu Jan To Mar23 Jun23The International Council on Clean TransportationОценок пока нет
- RES To GENSET Material Submittal-KДокумент35 страницRES To GENSET Material Submittal-KkkkhattabbbОценок пока нет
- Apu Fuel Cost Saving: Type of GPU Serviceable Unserviceable Diesel Operated Type 2 1 Electrically Operated Type 0 2Документ6 страницApu Fuel Cost Saving: Type of GPU Serviceable Unserviceable Diesel Operated Type 2 1 Electrically Operated Type 0 2Ras Síñĕ Jr.Оценок пока нет
- New Holland D180C Tier 4 Crawler Dozer Service Repair ManualДокумент21 страницаNew Holland D180C Tier 4 Crawler Dozer Service Repair ManualggjjjjotonesОценок пока нет
- Item 1.00 UPS System 15 kVA, 120 VAC 1-Phase: Gutor PEW 1015-220/120-EANДокумент2 страницыItem 1.00 UPS System 15 kVA, 120 VAC 1-Phase: Gutor PEW 1015-220/120-EANRifky ZuliansyahОценок пока нет
- TERI Press Launches Title by MNRE Advisor: Multiple Choice Questions On Environmental StudiesДокумент2 страницыTERI Press Launches Title by MNRE Advisor: Multiple Choice Questions On Environmental Studiesjitendra mauryaОценок пока нет
- QSK38 Epa 4 - Imo IiiДокумент2 страницыQSK38 Epa 4 - Imo Iiijorge luisОценок пока нет
- PBL 2020 Decarbonisation Options For The Dutch Offshore Natural Gas Industry 4161Документ54 страницыPBL 2020 Decarbonisation Options For The Dutch Offshore Natural Gas Industry 4161FDОценок пока нет
- Design and Construction of Micro Hydropower Generator at Sto. Tomas Tingloy BatangasДокумент79 страницDesign and Construction of Micro Hydropower Generator at Sto. Tomas Tingloy BatangasAlexa DaizОценок пока нет