Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- BS 131-7-1998Документ21 страницаBS 131-7-1998Germán VSОценок пока нет
- Turbomachinery Centrifugal Compressors: Class 13Документ70 страницTurbomachinery Centrifugal Compressors: Class 13Manoj BaishyaОценок пока нет
- Building Code PDFДокумент227 страницBuilding Code PDFBgee Lee100% (2)
- Cummins Engine Company, Inc M-90196 4BT3.9-MДокумент2 страницыCummins Engine Company, Inc M-90196 4BT3.9-Mคุณชายธวัชชัย เจริญสุข100% (1)
- MD DataДокумент140 страницMD DataKailash PandhareОценок пока нет
- Alfa Laval Separartor s937 ManualДокумент201 страницаAlfa Laval Separartor s937 ManualIgors VrublevskisОценок пока нет
- HB41AДокумент21 страницаHB41ANiat NiatОценок пока нет
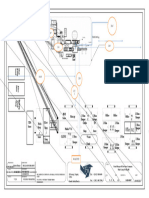
- Lay Out NewДокумент1 страницаLay Out Newmohnadjib03 mohnadjibОценок пока нет
- Electro Pneumatic Technology 2Документ29 страницElectro Pneumatic Technology 2Victor Al100% (1)
- Formula Sheet, Physics 1P22/1P92Документ2 страницыFormula Sheet, Physics 1P22/1P92Roy VeseyОценок пока нет
- Installation Manual: X-POWER DC Inverter (K Series) Outdoor UnitДокумент30 страницInstallation Manual: X-POWER DC Inverter (K Series) Outdoor UnitFred GarciaОценок пока нет
- Xprep C IcДокумент6 страницXprep C IcMiguelОценок пока нет
- The Jere Beasley Report, Jan. 2009Документ52 страницыThe Jere Beasley Report, Jan. 2009Beasley AllenОценок пока нет
- Operator Manual FurunoДокумент40 страницOperator Manual FurunoJan JbaОценок пока нет
- Astm 2161Документ26 страницAstm 2161tony juarezОценок пока нет
- Sandvik DP1500: Surface Top Hammer DrillsДокумент3 страницыSandvik DP1500: Surface Top Hammer DrillsRoynino Martinez ventura100% (1)
- December Electricity BillДокумент1 страницаDecember Electricity BillwakeupkenyansОценок пока нет
- General Procedure For Steam Blowing of Steam SystemДокумент9 страницGeneral Procedure For Steam Blowing of Steam SystemBalasubramanian CОценок пока нет
- Ce Project 1: Presenter NameДокумент9 страницCe Project 1: Presenter NameJayron John Puguon AquinoОценок пока нет
- Current Issues in Environmental Management in Australia: What Do People Think?Документ21 страницаCurrent Issues in Environmental Management in Australia: What Do People Think?Mahwestie PwarnasoekmaОценок пока нет
- Ho-SolarToday-April13 - v2Документ4 страницыHo-SolarToday-April13 - v2Danny Sánchez YánezОценок пока нет
- An Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsДокумент9 страницAn Active-Clamp Push-Pull Converter For Battery Sourcing ApplicationsYury KrivtsovОценок пока нет
- Datasheet N2XH IEC 60502 1Документ4 страницыDatasheet N2XH IEC 60502 1Marouan BouazizОценок пока нет
- Technical Data Sheet H7..N: Type OverviewДокумент4 страницыTechnical Data Sheet H7..N: Type OverviewEmir SabicОценок пока нет
- Rotary Actuators-Sept 05Документ8 страницRotary Actuators-Sept 05Eng-Mohammed SalemОценок пока нет
- BLHeli - 32 Manual ARM Rev32.x PDFДокумент10 страницBLHeli - 32 Manual ARM Rev32.x PDFaniket5941Оценок пока нет
- Unit 5.1 GB11 HSДокумент5 страницUnit 5.1 GB11 HSwinterflowervОценок пока нет
- Case Study Plant Harris Non Chemical DechlorinationДокумент1 страницаCase Study Plant Harris Non Chemical DechlorinationIrfan OmercausevicОценок пока нет
- 02 Pengukuran GravitasiДокумент90 страниц02 Pengukuran GravitasipanjiОценок пока нет
- Technical Writeup Letter US Bhima 2 0Документ8 страницTechnical Writeup Letter US Bhima 2 0VIGNESHAОценок пока нет