Вам также может понравиться
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Variance Reduction Techniques 1Документ48 страницVariance Reduction Techniques 1Teng PengОценок пока нет
- Practice 13 14 15Документ17 страницPractice 13 14 15Marisnelvys CabrejaОценок пока нет
- Stat331-Multiple Linear RegressionДокумент13 страницStat331-Multiple Linear RegressionSamantha YuОценок пока нет
- PH110 LABMANUAL 2023 To 2024Документ54 страницыPH110 LABMANUAL 2023 To 2024kumbutsomutaleОценок пока нет
- MultivariableRegression 6Документ44 страницыMultivariableRegression 6Alada manaОценок пока нет
- Method of Moments: Topic 13Документ9 страницMethod of Moments: Topic 13Zeeshan AhmedОценок пока нет
- Var: Forecasting and Impulse Response FunctionsДокумент27 страницVar: Forecasting and Impulse Response FunctionsAbhishek PuriОценок пока нет
- X (X X - . - . - . - . - X) : Neuro-Fuzzy Comp. - Ch. 3 May 24, 2005Документ20 страницX (X X - . - . - . - . - X) : Neuro-Fuzzy Comp. - Ch. 3 May 24, 2005Oluwafemi DagunduroОценок пока нет
- CH 14simulationmethods24Документ10 страницCH 14simulationmethods24joyashariОценок пока нет
- PH110 LABMANUAL 2023 To 2024Документ54 страницыPH110 LABMANUAL 2023 To 2024Bonaventure MasekoОценок пока нет
- Monte Carlo BasicsДокумент23 страницыMonte Carlo BasicsIon IvanОценок пока нет
- Monte Carlo Methods PDFДокумент6 страницMonte Carlo Methods PDFbhuniakanishkaОценок пока нет
- Seventh LectureДокумент31 страницаSeventh LectureSmith AlexОценок пока нет
- 1 Regression Analysis and Least Squares EstimatorsДокумент7 страниц1 Regression Analysis and Least Squares EstimatorsFreddie YuanОценок пока нет
- 1 Probability: 1.1 Normal DistributionДокумент7 страниц1 Probability: 1.1 Normal DistributionjernejajОценок пока нет
- Correlation in Random VariablesДокумент6 страницCorrelation in Random VariablesMadhu Babu SikhaОценок пока нет
- Statistics 512 Notes I D. SmallДокумент8 страницStatistics 512 Notes I D. SmallSandeep SinghОценок пока нет
- 5-MEASURES of DISPERSION-02-Aug-2019Material I 02-Aug-2019 Exp. No. 1 - Measures of Central Tendency Dispersion Skewness and KurtosiДокумент10 страниц5-MEASURES of DISPERSION-02-Aug-2019Material I 02-Aug-2019 Exp. No. 1 - Measures of Central Tendency Dispersion Skewness and Kurtosisahale sheraОценок пока нет
- Section 8.2: Monte Carlo Estimation: Discrete-Event Simulation: A First CourseДокумент19 страницSection 8.2: Monte Carlo Estimation: Discrete-Event Simulation: A First CoursessfofoОценок пока нет
- Module01 PDFДокумент3 страницыModule01 PDFEmman Joshua BustoОценок пока нет
- Probability Formula SheetДокумент11 страницProbability Formula SheetJake RoosenbloomОценок пока нет
- HW 5Документ5 страницHW 5Johnathan TuckerОценок пока нет
- 0 Tlemcen Mio Contrib PDFДокумент48 страниц0 Tlemcen Mio Contrib PDFManvir Singh GillОценок пока нет
- MC0074 - Statistical and Numerical Methods Using C++Документ14 страницMC0074 - Statistical and Numerical Methods Using C++Ravish RavindranОценок пока нет
- Numerical Solutions of Differential Equations: Euler's MethodДокумент9 страницNumerical Solutions of Differential Equations: Euler's MethodVinayaga Murthy GОценок пока нет
- Lect1 12Документ32 страницыLect1 12Ankit SaxenaОценок пока нет
- Basic Monte Carlo TechniquesДокумент10 страницBasic Monte Carlo TechniquesMobeen AhmadОценок пока нет
- Linear ModelsДокумент35 страницLinear ModelselmoreillyОценок пока нет
- Chapter 3 Wiener FiltersДокумент26 страницChapter 3 Wiener FiltersrockeygreatОценок пока нет
- MFDC 9 DДокумент16 страницMFDC 9 DTu ShirotaОценок пока нет
- E ∠ δ, …, E ∠δ δ, …, δ E, …, E: II. Classical Power System Model For Transient Stability AnalysisДокумент6 страницE ∠ δ, …, E ∠δ δ, …, δ E, …, E: II. Classical Power System Model For Transient Stability AnalysisSyaloom Gorga NapitupuluОценок пока нет
- Statistics 512 Notes 8: The Monte Carlo Method: X X H H X Is Normal (With UnknownДокумент7 страницStatistics 512 Notes 8: The Monte Carlo Method: X X H H X Is Normal (With UnknownSandeep SinghОценок пока нет
- Ece830 Fall11 Lecture20Документ7 страницEce830 Fall11 Lecture20Jean Danny PhiliusОценок пока нет
- Exercises For TFFY54Документ25 страницExercises For TFFY54sattar28Оценок пока нет
- 3 Fall 2007 Exam PDFДокумент7 страниц3 Fall 2007 Exam PDFAchilles 777Оценок пока нет
- Ordinary Differential EquationДокумент13 страницOrdinary Differential EquationMich LadycanОценок пока нет
- Seminar Report On Contraction Mapping in Adaptive FiltersДокумент14 страницSeminar Report On Contraction Mapping in Adaptive FiltersSrinivasSunnyОценок пока нет
- Statistical Averages: I I I N IДокумент18 страницStatistical Averages: I I I N Ia_karimОценок пока нет
- Unit 4Документ10 страницUnit 4GurunathanОценок пока нет
- EGR 310 Lab: Uncertainty Estimation WorkshopДокумент8 страницEGR 310 Lab: Uncertainty Estimation WorkshopJohn SmithОценок пока нет
- Use of Summation SignДокумент2 страницыUse of Summation Signnavin9849Оценок пока нет
- ECE311 - Dynamic Systems and Control Linearization of Nonlinear SystemsДокумент5 страницECE311 - Dynamic Systems and Control Linearization of Nonlinear Systemsnirmal_inboxОценок пока нет
- PME-lec7-ch4-aДокумент67 страницPME-lec7-ch4-anaba.jeeeОценок пока нет
- 1 Regression Analysis and Least Squares EstimatorsДокумент8 страниц1 Regression Analysis and Least Squares EstimatorsJenningsJingjingXuОценок пока нет
- MultivariableRegression SummaryДокумент15 страницMultivariableRegression SummaryAlada manaОценок пока нет
- Matrix MultДокумент6 страницMatrix Multdaweley389Оценок пока нет
- Image Registration: 1 Problem DescriptionДокумент10 страницImage Registration: 1 Problem DescriptionSagar NerellaОценок пока нет
- Midterm SolutionДокумент11 страницMidterm SolutionAndrés López MartínezОценок пока нет
- Lab 1: Model SelectionДокумент6 страницLab 1: Model SelectionthomasverbekeОценок пока нет
- Lecture36 2012 FullДокумент30 страницLecture36 2012 Fullronaldang89Оценок пока нет
- Tfestimate: SyntaxДокумент14 страницTfestimate: Syntaxsafinasal7432Оценок пока нет
- Intersection Matlab FunctionДокумент5 страницIntersection Matlab FunctionNadeem Ul HaqОценок пока нет
- Week 8 Lecture NewДокумент49 страницWeek 8 Lecture NewHANJING QUANОценок пока нет
- Method of MomentsДокумент8 страницMethod of MomentsSereneKhatiwadaОценок пока нет
- Lab Tutorial 9: Regression Modelling: 9.1 Fitting Linear Models: Linear RegressionДокумент4 страницыLab Tutorial 9: Regression Modelling: 9.1 Fitting Linear Models: Linear RegressionPragyan NandaОценок пока нет
- Chap 2Документ9 страницChap 2MingdreamerОценок пока нет
- Mme PDFДокумент9 страницMme PDFHöîkí YöñОценок пока нет
- Vector Autoregressions: How To Choose The Order of A VARДокумент8 страницVector Autoregressions: How To Choose The Order of A VARv4nhuy3nОценок пока нет
- Primbon Command 3GДокумент3 страницыPrimbon Command 3GEriska FebriantoОценок пока нет
- Relay Identification: Example CDG31FF002SACHДокумент5 страницRelay Identification: Example CDG31FF002SACHRohit RanaОценок пока нет
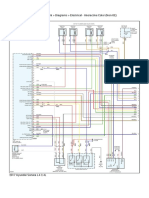
- 2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairДокумент6 страниц2017 Hyundai Sonata L4-2.4L Engine Controls (Powertrain Management) - ALLDATA RepairChino PlagaОценок пока нет
- TNM Sites May 2023Документ24 страницыTNM Sites May 2023Joseph ChikuseОценок пока нет
- Nukote Aegis SubmittalДокумент112 страницNukote Aegis SubmittalMarco Dos Santos NevesОценок пока нет
- 100 Câu Viết Lại Câu Ôn Thi Vào Lóp 6Документ10 страниц100 Câu Viết Lại Câu Ôn Thi Vào Lóp 6Nguyễn Thanh PhươngОценок пока нет
- 12V-100Ah FTA DatasheetДокумент1 страница12V-100Ah FTA Datasheetchandrashekar_ganesanОценок пока нет
- Asms 02 0033Документ6 страницAsms 02 0033Delfia AkiharyОценок пока нет
- Semicounductors & Pn-Junction (Complete)Документ47 страницSemicounductors & Pn-Junction (Complete)Khalid AliОценок пока нет
- Heart of Dankness by Mark Haskell Smith - ExcerptДокумент29 страницHeart of Dankness by Mark Haskell Smith - ExcerptCrown Publishing GroupОценок пока нет
- Project Final PDFДокумент98 страницProject Final PDFNgonidzashe MhukaОценок пока нет
- Prerak BhavsarДокумент1 страницаPrerak Bhavsarprerakb456gmailcomОценок пока нет
- Alien Magic - William Hamilton IIIДокумент179 страницAlien Magic - William Hamilton IIICarlos Rodriguez100% (7)
- Material Control Procedure - TemplateДокумент5 страницMaterial Control Procedure - TemplateHernandito Rahmat KusumaОценок пока нет
- B11R Jonckheere JHV2 SpecДокумент1 страницаB11R Jonckheere JHV2 SpecVishwanath SeetaramОценок пока нет
- Multical® 402: Data SheetДокумент20 страницMultical® 402: Data SheetSundar RamasamyОценок пока нет
- CF1900SS-DF Example Spec - Rev1Документ1 страницаCF1900SS-DF Example Spec - Rev1parsiti unnesОценок пока нет
- Lesson Plan 1 - Agriculture in Your LifeДокумент6 страницLesson Plan 1 - Agriculture in Your Lifeapi-235918896Оценок пока нет
- SpiralsДокумент12 страницSpiralskkglobalОценок пока нет
- hw10 PDFДокумент10 страницhw10 PDFTahok24Оценок пока нет
- YS 700W Bifacial Solar PanelДокумент2 страницыYS 700W Bifacial Solar PanelDaniel RodriguezОценок пока нет
- Design, Fabrication and Analysis of Fibonacci TurbineДокумент5 страницDesign, Fabrication and Analysis of Fibonacci TurbinearcaldartОценок пока нет
- Ferrozine Rapid Liquid Method Method 8147 0.009 To 1.400 MG/L Fe Pour-Thru CellДокумент6 страницFerrozine Rapid Liquid Method Method 8147 0.009 To 1.400 MG/L Fe Pour-Thru CellCarlos Andres MedinaОценок пока нет
- 02 Unit I Environmental Studies-A Multidisciplinary Subject 14-01-2022Документ69 страниц02 Unit I Environmental Studies-A Multidisciplinary Subject 14-01-2022doramonbhaiyaОценок пока нет
- Air Tunnels: Submitted By: Priyanka Sinha SK MD Sibli Akram Ananya Sreyansri NandaДокумент8 страницAir Tunnels: Submitted By: Priyanka Sinha SK MD Sibli Akram Ananya Sreyansri NandaPriyanka SinhaОценок пока нет
- Drypix 6000 12eДокумент501 страницаDrypix 6000 12eraj_meditech100% (1)
- Prince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyДокумент1 страницаPrince Hydraulics Wolverine Adjustable Flow Control Valve Offered by PRC Industrial SupplyPRC Industrial SupplyОценок пока нет
- Instrumentation & Measurement SystemsДокумент7 страницInstrumentation & Measurement SystemsAnkit KumarОценок пока нет
- Notes On Peck&Coyle Practical CriticismДокумент10 страницNotes On Peck&Coyle Practical CriticismLily DameОценок пока нет
- 1 s2.0 S0092867422011734 MainДокумент29 страниц1 s2.0 S0092867422011734 MainIoanna NikdimaОценок пока нет