Вам также может понравиться
- Protections of Devices and CircuitsДокумент69 страницProtections of Devices and CircuitsAtiq Ur RehmanОценок пока нет
- Rashid Ch03 ImagesДокумент69 страницRashid Ch03 ImagesAtiq Ur RehmanОценок пока нет
- Devices, Circuits, and ApplicationsДокумент16 страницDevices, Circuits, and ApplicationsAtiq Ur RehmanОценок пока нет
- Devices, Circuits, and ApplicationsДокумент55 страницDevices, Circuits, and ApplicationsAtiq Ur RehmanОценок пока нет
- Psim Interface Opal RTДокумент33 страницыPsim Interface Opal RTtvs_krishnavarmaОценок пока нет
- DC MotorДокумент38 страницDC MotorMarc Joshua MACATANGAYОценок пока нет
- Articol - Dewan - Rectifier Filter Design PDFДокумент7 страницArticol - Dewan - Rectifier Filter Design PDFCovaci BogdanОценок пока нет
- Operational AmplifiersДокумент49 страницOperational AmplifiersKostas TressosОценок пока нет
- 02 Uncontrolled AC To DC Converters3Документ46 страниц02 Uncontrolled AC To DC Converters3siegfred sicatОценок пока нет
- Intro Op AmpДокумент44 страницыIntro Op AmpNimish PrabhakarОценок пока нет
- Power Electronics and Control PDFДокумент45 страницPower Electronics and Control PDFmichaelОценок пока нет
- Edc Lab ManualДокумент70 страницEdc Lab ManualreneeshczОценок пока нет
- Analog Circuits: A. A. Lande, E & TC DeptДокумент96 страницAnalog Circuits: A. A. Lande, E & TC DeptvmspraneethОценок пока нет
- AC Electrical Machines Lab Manual 3 - 1Документ65 страницAC Electrical Machines Lab Manual 3 - 1Rockstar RichОценок пока нет
- Power SupliesДокумент42 страницыPower SupliesCenkGezmişОценок пока нет
- Dual Input Differential Amplifier GuideДокумент5 страницDual Input Differential Amplifier GuidePrempal TomarОценок пока нет
- Ee 328 Lecture 11Документ55 страницEe 328 Lecture 11somethingfornowОценок пока нет
- EE6201 Circuit Theory Regulation 2013 Lecture Notes PDFДокумент257 страницEE6201 Circuit Theory Regulation 2013 Lecture Notes PDFVenkatesan Swamy100% (1)
- III Eee 05 Ee8501 Psa Unit 1Документ37 страницIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANОценок пока нет
- Power Electronics Lab Manual PDFДокумент41 страницаPower Electronics Lab Manual PDFSudhakar MarojuОценок пока нет
- Ee101 Opamp 1Документ85 страницEe101 Opamp 1Ankur SinghОценок пока нет
- Simulation of Buck Converter with Synchronous RectifierДокумент7 страницSimulation of Buck Converter with Synchronous RectifierThinh NguyenОценок пока нет
- Tutorial experiments on solar energy conversion0.311 W= 11.6%2.67 WEffective area of the solar moduleShort-circuit currentIncident radiant powerElectrical power output at maximum power pointEfficiencyДокумент40 страницTutorial experiments on solar energy conversion0.311 W= 11.6%2.67 WEffective area of the solar moduleShort-circuit currentIncident radiant powerElectrical power output at maximum power pointEfficiencyAmélia MoreiraОценок пока нет
- OPAL-RT How-To Video and Quick Start Guide Links (Updated Feb 2019)Документ5 страницOPAL-RT How-To Video and Quick Start Guide Links (Updated Feb 2019)Ram Mohan Rao MakineniОценок пока нет
- Lecture 5 - Climper and Clamper CircuitДокумент22 страницыLecture 5 - Climper and Clamper CircuitArifah HamidunОценок пока нет
- Power Electronics &simulation Lab ManualДокумент51 страницаPower Electronics &simulation Lab Manualarshia tabassumОценок пока нет
- RLC Spice Simulink 1Документ9 страницRLC Spice Simulink 1ᘍᘙᖆᓵᖳᘴᕦ ᒏᘴᒺᓧᕠОценок пока нет
- DC Servo Motor - MalДокумент6 страницDC Servo Motor - Malapi-19787379100% (1)
- EE6201 Circuit Theory Regulation 2013 Lecture Notes PDFДокумент251 страницаEE6201 Circuit Theory Regulation 2013 Lecture Notes PDFrajОценок пока нет
- Understanding The Right-Half-Plane ZeroДокумент3 страницыUnderstanding The Right-Half-Plane ZerokurabyqldОценок пока нет
- Hopkinson Test On DC Shunt MotorДокумент5 страницHopkinson Test On DC Shunt MotorVarun VadluriОценок пока нет
- "Steady-State Modeling and Simulation of A Distribution Feeder With Distributed Energy Resources in A Real-Time Digital Simulation Environment PDFДокумент88 страниц"Steady-State Modeling and Simulation of A Distribution Feeder With Distributed Energy Resources in A Real-Time Digital Simulation Environment PDFEynher Abel RiascosОценок пока нет
- Power Electronics Lab Manual1Документ72 страницыPower Electronics Lab Manual1Harish SvОценок пока нет
- Exp 03 Function Generator Using 741 Op-AmpДокумент4 страницыExp 03 Function Generator Using 741 Op-Ampkaushal4053100% (2)
- Title: Design of A Flash Analog To Digital ConverterДокумент4 страницыTitle: Design of A Flash Analog To Digital Converteranon_776365175Оценок пока нет
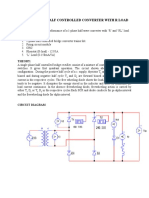
- Single Phase Half Controlled Converter With R LoadДокумент3 страницыSingle Phase Half Controlled Converter With R LoadB ANIL KUMARОценок пока нет
- Measuring Instruments and Circuit Elements Lab ExperimentДокумент38 страницMeasuring Instruments and Circuit Elements Lab ExperimentSaif KhanОценок пока нет
- Linear IC Guide for Op-Amps & ApplicationsДокумент146 страницLinear IC Guide for Op-Amps & ApplicationsAnonymous n30qTRQPoIОценок пока нет
- Part IV OpampДокумент45 страницPart IV OpampKunalОценок пока нет
- Power Electronics Textbook Companion Scilab CodesДокумент241 страницаPower Electronics Textbook Companion Scilab CodesMoyses Naves de MoraesОценок пока нет
- Inverting Amplifiers Lab ReportДокумент9 страницInverting Amplifiers Lab ReportRaihan JannatiОценок пока нет
- Electronic Circuit 1 ManualДокумент44 страницыElectronic Circuit 1 ManualEr AnandОценок пока нет
- MALVINO & BATES Chapter 08Документ29 страницMALVINO & BATES Chapter 08Reece RevosaОценок пока нет
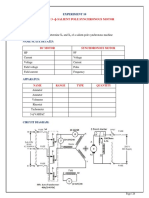
- Slip Test On Salient Pole MachineДокумент3 страницыSlip Test On Salient Pole Machinedeepak reddyОценок пока нет
- Analysis of Class B Push-Pull Amplifier CircuitДокумент24 страницыAnalysis of Class B Push-Pull Amplifier CircuitMbugua DuncanОценок пока нет
- Steady-State Equivalent Circuit Modeling, Losses, and EfficiencyДокумент20 страницSteady-State Equivalent Circuit Modeling, Losses, and EfficiencyhassanОценок пока нет
- EC2155 - Circuits & Devices Lab ManualДокумент41 страницаEC2155 - Circuits & Devices Lab ManualRamkumar Sivakaminathan100% (1)
- Workshop ON Ltspice: Fabrice WATEAUДокумент60 страницWorkshop ON Ltspice: Fabrice WATEAUkalimbaloОценок пока нет
- Voltage Regulation of 3-Phase Alternator by ZPF and ASA MethodsДокумент6 страницVoltage Regulation of 3-Phase Alternator by ZPF and ASA Methods61EEPrabhat PalОценок пока нет
- Major Project Report on 12V Battery Charger FabricationДокумент10 страницMajor Project Report on 12V Battery Charger FabricationDebeshОценок пока нет
- Electronic Devices and Circuit Theory 10th Ed Boylestad Chapter 5 141002063808 Phpapp02 PDFДокумент14 страницElectronic Devices and Circuit Theory 10th Ed Boylestad Chapter 5 141002063808 Phpapp02 PDFchhaya groverОценок пока нет
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesДокумент7 страницTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- LAB-VOLT 3-Phase Induction (Squirrel-Cage) MachinesДокумент11 страницLAB-VOLT 3-Phase Induction (Squirrel-Cage) Machinesanyr2Оценок пока нет
- Verify Thevenin's TheoremДокумент10 страницVerify Thevenin's TheoremJay SathvaraОценок пока нет
- Ranganathan Polytechnic College Coimbatore.: Simulation Practical Lab ManualДокумент32 страницыRanganathan Polytechnic College Coimbatore.: Simulation Practical Lab ManualBala SVD100% (1)
- Linear and Digital Integrated Circuits: Uni T - 1 Operati Onal Ampli FierДокумент116 страницLinear and Digital Integrated Circuits: Uni T - 1 Operati Onal Ampli FierBOGGULA SURENDAR REDDYОценок пока нет
- Power 5Документ126 страницPower 5koponb107Оценок пока нет
- Haseeb HassanДокумент3 страницыHaseeb HassanAtiq Ur RehmanОценок пока нет
- NBGДокумент3 страницыNBGAtiq Ur RehmanОценок пока нет
- MNДокумент3 страницыMNAtiq Ur RehmanОценок пока нет
- Ahsan Ullah Qasmi Updated CVДокумент3 страницыAhsan Ullah Qasmi Updated CVAtiq Ur RehmanОценок пока нет
- Insulation BOQ Area Wise (Square MTR.)Документ12 страницInsulation BOQ Area Wise (Square MTR.)Atiq_2909Оценок пока нет
- CДокумент4 страницыCAtiq Ur RehmanОценок пока нет
- CVДокумент2 страницыCVAtiq Ur RehmanОценок пока нет
- Azeem CVДокумент2 страницыAzeem CVAtiq Ur RehmanОценок пока нет
- CV JДокумент2 страницыCV JAtiq Ur RehmanОценок пока нет
- CV MKДокумент2 страницыCV MKAtiq Ur RehmanОценок пока нет
- CVДокумент2 страницыCVAtiq Ur RehmanОценок пока нет
- 5 - Qasim Shahzad CVДокумент2 страницы5 - Qasim Shahzad CVAtiq Ur RehmanОценок пока нет
- SheetДокумент3 страницыSheetAtiq Ur RehmanОценок пока нет
- D.G Khan Cement Thermal Insulation Materials ListДокумент11 страницD.G Khan Cement Thermal Insulation Materials ListAtiq Ur RehmanОценок пока нет
- PR DataДокумент16 страницPR DataAtiq Ur RehmanОценок пока нет
- Battery Problems and SolutionsДокумент27 страницBattery Problems and SolutionsAtiq Ur RehmanОценок пока нет
- Insu BlanketДокумент1 страницаInsu BlanketAtiq Ur RehmanОценок пока нет
- AaaaaaДокумент5 страницAaaaaaAtiq_2909Оценок пока нет
- Install Civil and Mechanical Parts of Solar PV Power PlantДокумент19 страницInstall Civil and Mechanical Parts of Solar PV Power PlantAtiq Ur RehmanОценок пока нет
- CPLДокумент2 страницыCPLAtiq Ur RehmanОценок пока нет
- ManpowerДокумент9 страницManpowerAtiq Ur RehmanОценок пока нет
- DIGSI Invoice PDFДокумент1 страницаDIGSI Invoice PDFAtiq Ur RehmanОценок пока нет
- A4-P 1.0 enДокумент207 страницA4-P 1.0 enAtiq Ur RehmanОценок пока нет
- Certificate of OFF Grid Solar PV SystemДокумент1 страницаCertificate of OFF Grid Solar PV SystemAtiq Ur RehmanОценок пока нет
- Energy Curves ResourcesДокумент16 страницEnergy Curves ResourcesAtiq Ur RehmanОценок пока нет
- 051 Cable Tray PDFДокумент62 страницы051 Cable Tray PDFAtiq_2909Оценок пока нет
- Difference Between DC and AC WiringДокумент8 страницDifference Between DC and AC WiringAtiq Ur RehmanОценок пока нет
- A4-P 3.0 enДокумент121 страницаA4-P 3.0 enAtiq Ur RehmanОценок пока нет
- Off-Grid Systems Advantages & DisadvantagesДокумент8 страницOff-Grid Systems Advantages & DisadvantagesAtiq Ur RehmanОценок пока нет
- A4-P 4.0 enДокумент200 страницA4-P 4.0 enAtiq Ur RehmanОценок пока нет
- 110 TOP Survey Interview QuestionsДокумент18 страниц110 TOP Survey Interview QuestionsImmu100% (1)
- DRRR STEM 1st Quarter S.Y.2021-2022Документ41 страницаDRRR STEM 1st Quarter S.Y.2021-2022Marvin MoreteОценок пока нет
- Supply Chain AssignmentДокумент29 страницSupply Chain AssignmentHisham JackОценок пока нет
- Toolkit:ALLCLEAR - SKYbrary Aviation SafetyДокумент3 страницыToolkit:ALLCLEAR - SKYbrary Aviation Safetybhartisingh0812Оценок пока нет
- The Highest Form of Yoga - Sant Kirpal SinghДокумент9 страницThe Highest Form of Yoga - Sant Kirpal SinghKirpal Singh Disciple100% (2)
- MW Scenario Handbook V 12 AДокумент121 страницаMW Scenario Handbook V 12 AWilliam HamiltonОценок пока нет
- Arpia Lovely Rose Quiz - Chapter 6 - Joint Arrangements - 2020 EditionДокумент4 страницыArpia Lovely Rose Quiz - Chapter 6 - Joint Arrangements - 2020 EditionLovely ArpiaОценок пока нет
- Science 10-2nd Periodical Test 2018-19Документ2 страницыScience 10-2nd Periodical Test 2018-19Emiliano Dela Cruz100% (3)
- Group 9 - LLIR ProjectДокумент8 страницGroup 9 - LLIR ProjectRahul RaoОценок пока нет
- What Is Love? - Osho: Sat Sangha SalonДокумент7 страницWhat Is Love? - Osho: Sat Sangha SalonMichael VladislavОценок пока нет
- Passive Voice Exercises EnglishДокумент1 страницаPassive Voice Exercises EnglishPaulo AbrantesОценок пока нет
- ISA standards, materials, and control room conceptsДокумент8 страницISA standards, materials, and control room conceptsGiovanniОценок пока нет
- Chronic Pancreatitis - Management - UpToDateДокумент22 страницыChronic Pancreatitis - Management - UpToDateJose Miranda ChavezОценок пока нет
- PHEI Yield Curve: Daily Fair Price & Yield Indonesia Government Securities November 2, 2020Документ3 страницыPHEI Yield Curve: Daily Fair Price & Yield Indonesia Government Securities November 2, 2020Nope Nope NopeОценок пока нет
- Corporate Law Scope and RegulationДокумент21 страницаCorporate Law Scope and RegulationBasit KhanОценок пока нет
- Statement of The Problem: Notre Dame of Marbel University Integrated Basic EducationДокумент6 страницStatement of The Problem: Notre Dame of Marbel University Integrated Basic Educationgab rielleОценок пока нет
- All Forms of Gerunds and InfinitivesДокумент4 страницыAll Forms of Gerunds and InfinitivesNagimaОценок пока нет
- Exámenes Trinity C1 Ejemplos - Modelo Completos de Examen PDFДокумент6 страницExámenes Trinity C1 Ejemplos - Modelo Completos de Examen PDFM AngelesОценок пока нет
- Explaining ADHD To TeachersДокумент1 страницаExplaining ADHD To TeachersChris100% (2)
- Tadesse JaletaДокумент160 страницTadesse JaletaAhmed GemedaОценок пока нет
- Marrickville DCP 2011 - 2.3 Site and Context AnalysisДокумент9 страницMarrickville DCP 2011 - 2.3 Site and Context AnalysiskiranjiОценок пока нет
- Amway Health CareДокумент7 страницAmway Health CareChowduru Venkat Sasidhar SharmaОценок пока нет
- Ten - Doc. TR 20 01 (Vol. II)Документ309 страницTen - Doc. TR 20 01 (Vol. II)Manoj OjhaОценок пока нет
- Research PhilosophyДокумент4 страницыResearch Philosophygdayanand4uОценок пока нет
- Tennessee Inmate Search Department of Corrections LookupДокумент9 страницTennessee Inmate Search Department of Corrections Lookupinmatesearchinfo50% (2)
- Brain Chip ReportДокумент30 страницBrain Chip Reportsrikanthkalemla100% (3)
- 2013 Gerber CatalogДокумент84 страницы2013 Gerber CatalogMario LopezОценок пока нет
- Lost Temple of Forgotten Evil - Adventure v3 PDFДокумент36 страницLost Temple of Forgotten Evil - Adventure v3 PDFВячеслав100% (2)
- Architectural PlateДокумент3 страницыArchitectural PlateRiza CorpuzОценок пока нет
- FM Stereo FM-AM Tuner: ST-SE500 ST-SE700Документ64 страницыFM Stereo FM-AM Tuner: ST-SE500 ST-SE700al80al80100% (4)