Вам также может понравиться
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- Chapter - 09 ESP Design ExamplesДокумент16 страницChapter - 09 ESP Design Examplesdewidar1234100% (11)
- Oracle Data Integration - An Overview With Emphasis in DW AppДокумент34 страницыOracle Data Integration - An Overview With Emphasis in DW Appkinan_kazuki104Оценок пока нет
- Max Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Документ132 страницыMax Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Brian O'SullivanОценок пока нет
- Bellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechДокумент15 страницBellin, E. H. (1984) - The Psychoanalytic Narrative On The Transformational Axis Between Writing and SpeechofanimenochОценок пока нет
- Komatsu PC400LC-7L A86001 TESTДокумент408 страницKomatsu PC400LC-7L A86001 TESTHai Van100% (2)
- Drager Fabius Gs Technical Service ManualДокумент350 страницDrager Fabius Gs Technical Service ManualLeonardo Chirinos100% (3)
- 10P01 1a e 604 R00 - HCSD - Pump - MotorДокумент17 страниц10P01 1a e 604 R00 - HCSD - Pump - Motorsuleman247Оценок пока нет
- Performance Data CurveДокумент57 страницPerformance Data Curveedwin nolberto100% (1)
- 6btaa5 9G2Документ3 страницы6btaa5 9G2Budi Nais100% (2)
- ANSYS ACT Developers GuideДокумент506 страницANSYS ACT Developers GuideEDIZONОценок пока нет
- Bitzer - 4GE-30-40P X 2comp - (1'C) - r407c - 070917 PDFДокумент7 страницBitzer - 4GE-30-40P X 2comp - (1'C) - r407c - 070917 PDFAgus CahyonoОценок пока нет
- BITZER Output data summaryДокумент10 страницBITZER Output data summarySaša ColićОценок пока нет
- A. Bitzer 4FES-3Y-40SДокумент6 страницA. Bitzer 4FES-3Y-40SĐiện IceОценок пока нет
- 4CES-9 R404A t0 - 7 TC 45Документ4 страницы4CES-9 R404A t0 - 7 TC 45Tedy ChriswandaОценок пока нет
- Pump System 17k BPD 143psi CunduacánДокумент5 страницPump System 17k BPD 143psi CunduacánGerry RamirezОценок пока нет
- NE6188CZДокумент9 страницNE6188CZhobolghaniОценок пока нет
- BITZER Output data for 6GE-34Y and 6HE-28Y semi-hermetic compressorsДокумент8 страницBITZER Output data for 6GE-34Y and 6HE-28Y semi-hermetic compressorsAdrian ValerianОценок пока нет
- Bitzer Selection SoftwareДокумент7 страницBitzer Selection Softwarefitra abadiОценок пока нет
- Donper Ne6170bzДокумент9 страницDonper Ne6170bzriyowОценок пока нет
- BITZER Output Data: Created On: 11.05.2023 13:44:33Документ14 страницBITZER Output Data: Created On: 11.05.2023 13:44:33Erymanthus NgânОценок пока нет
- 4NES-14Y Bitzer 4NCS-12.2YДокумент13 страниц4NES-14Y Bitzer 4NCS-12.2YMiroslaw LabudaОценок пока нет
- 3500 LPM at 90 MTR - Diesel Engine Pump - DatasheetДокумент1 страница3500 LPM at 90 MTR - Diesel Engine Pump - Datasheetjaved777780Оценок пока нет
- DT40-DT45S (50 HZ)Документ3 страницыDT40-DT45S (50 HZ)Md ShОценок пока нет
- 4he 25y Bitzer 4h 25.2yДокумент13 страниц4he 25y Bitzer 4h 25.2yclimlaggouneОценок пока нет
- Project Survey: Selected CompressorsДокумент6 страницProject Survey: Selected CompressorsMr. RfОценок пока нет
- Selection: Semi-Hermetic Reciprocating Compressors: Input ValuesДокумент5 страницSelection: Semi-Hermetic Reciprocating Compressors: Input ValuesoozОценок пока нет
- 6JE-25; R507A; t0 -35; tc 45Документ4 страницы6JE-25; R507A; t0 -35; tc 45FERNANDO RECALDEОценок пока нет
- Chem-Feed Diaphragm Metering Pump: FeaturesДокумент4 страницыChem-Feed Diaphragm Metering Pump: FeaturesAlejandro MoralesОценок пока нет
- 250EDJ 7BAR Local PART 1Документ9 страниц250EDJ 7BAR Local PART 1algadi123Оценок пока нет
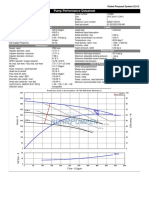
- Pump Performance DatasheetДокумент5 страницPump Performance DatasheetKhamees Marwan MuhiesenОценок пока нет
- Documents PDFДокумент22 страницыDocuments PDFwalid kawsarОценок пока нет
- DT300-DT330S (50 HZ)Документ3 страницыDT300-DT330S (50 HZ)tarekОценок пока нет
- DT45-DT50S (60 HZ)Документ3 страницыDT45-DT50S (60 HZ)energyengineerestОценок пока нет
- Pump Performance Datasheet: Operating Conditions LiquidДокумент3 страницыPump Performance Datasheet: Operating Conditions LiquidMilan KareliyaОценок пока нет
- Bitzer Selection Software 1Документ7 страницBitzer Selection Software 1raudhatulyuniaОценок пока нет
- Compreso 4ves-10 R507a t0 - 8 TC 45 Cuarto 0cДокумент5 страницCompreso 4ves-10 R507a t0 - 8 TC 45 Cuarto 0cArturo 1Оценок пока нет
- Pump Performance Datasheet: Operating Conditions LiquidДокумент2 страницыPump Performance Datasheet: Operating Conditions LiquidraviОценок пока нет
- CT365 CT400S (QSG12 50Hz)Документ3 страницыCT365 CT400S (QSG12 50Hz)Md ShОценок пока нет
- 4CES-6Y Bitzer PDFДокумент7 страниц4CES-6Y Bitzer PDFEm GomezОценок пока нет
- DT100-DT110S (50 HZ)Документ3 страницыDT100-DT110S (50 HZ)Md ShОценок пока нет
- DRX-T7445HD-H: Toshiba X-Ray Tube (Water-Cooled Type)Документ4 страницыDRX-T7445HD-H: Toshiba X-Ray Tube (Water-Cooled Type)Advanced Medical Group AMGОценок пока нет
- CurvasДокумент30 страницCurvasArturo Morales LinaresОценок пока нет
- DT60-DT70S (50 HZ)Документ3 страницыDT60-DT70S (50 HZ)Md ShОценок пока нет
- Ap303 - Cooling Water PumpsДокумент4 страницыAp303 - Cooling Water Pumpsminov minovitchОценок пока нет
- SS-250-115, IM-225, IM-375 Product ManualДокумент21 страницаSS-250-115, IM-225, IM-375 Product ManualMisael YermiaОценок пока нет
- Aquatech International 7 Pump Proposal for Occidental Mukhaizna Recirculation SystemДокумент8 страницAquatech International 7 Pump Proposal for Occidental Mukhaizna Recirculation Systemkarioke mohaОценок пока нет
- 1) - 136.96 LPS at 89m - Balasore - HSC - R2Документ4 страницы1) - 136.96 LPS at 89m - Balasore - HSC - R2Mansoor Ahamed AbbasОценок пока нет
- Blower Selection For PharmaДокумент1 страницаBlower Selection For PharmaKasturirangan NarayananОценок пока нет
- CSH7573-90 R134a t0 TC 50-1Документ9 страницCSH7573-90 R134a t0 TC 50-1JavedОценок пока нет
- Compresor 4tes-12 R507a t0 - 8 TC 45 AntecamaraДокумент5 страницCompresor 4tes-12 R507a t0 - 8 TC 45 AntecamaraArturo 1Оценок пока нет
- Maxon DC Motor 22mm, Encoder, Gear 14:1, 12V 6WДокумент5 страницMaxon DC Motor 22mm, Encoder, Gear 14:1, 12V 6WBeaОценок пока нет
- S12H PtaДокумент4 страницыS12H PtaThanh Trúc Đặng HuỳnhОценок пока нет
- CPS 3X3X11 - 3500 RPMДокумент1 страницаCPS 3X3X11 - 3500 RPMLuis SudОценок пока нет
- CT2850-CT3150S (60 HZ)Документ3 страницыCT2850-CT3150S (60 HZ)Rani OsmanОценок пока нет
- 2500 GPM X 180 Psi - VTP ULFMДокумент7 страниц2500 GPM X 180 Psi - VTP ULFMFELОценок пока нет
- 4012TESI LC Spark Gas Cogen Tech DataДокумент8 страниц4012TESI LC Spark Gas Cogen Tech Datadwi monikaОценок пока нет
- Hermle: EquipmentДокумент4 страницыHermle: EquipmentHectorОценок пока нет
- Pump Performance Datasheet for LHC 200-400Документ1 страницаPump Performance Datasheet for LHC 200-400narisОценок пока нет
- Ficha Técnica CompresorДокумент4 страницыFicha Técnica CompresorPaulo Aparicio PortugalОценок пока нет
- DocumentsДокумент8 страницDocumentsRahmadi PutraОценок пока нет
- CSH7583-80 R134a t0 7 TC 50Документ4 страницыCSH7583-80 R134a t0 7 TC 50Madel D.Оценок пока нет
- (BS) - Genset Zhungda ZD-W200GF (200kW 250kva)Документ6 страниц(BS) - Genset Zhungda ZD-W200GF (200kW 250kva)apray aprayОценок пока нет
- PCM Moineau Oilfield: Sucker Rods CentralizersДокумент2 страницыPCM Moineau Oilfield: Sucker Rods CentralizersSanobyОценок пока нет
- SPE-182251-MS Field Trial Analyzing of Rodless PCP Technology: Problems, Improvements and ResultsДокумент7 страницSPE-182251-MS Field Trial Analyzing of Rodless PCP Technology: Problems, Improvements and ResultsSanobyОценок пока нет
- PCM Moineau Oilfield: Sucker Rods CentralizersДокумент2 страницыPCM Moineau Oilfield: Sucker Rods CentralizersSanobyОценок пока нет
- Rotor Sizing Model 2014 Rev2Документ6 страницRotor Sizing Model 2014 Rev2SanobyОценок пока нет
- IMChap 014 SДокумент14 страницIMChap 014 STroy WingerОценок пока нет
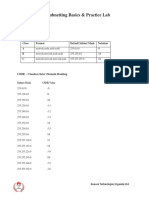
- SubNetting Practice LabДокумент3 страницыSubNetting Practice LabOdoch HerbertОценок пока нет
- Instrumentation Design UTHMДокумент5 страницInstrumentation Design UTHMAnis AzwaОценок пока нет
- Pumps - IntroductionДокумент31 страницаPumps - IntroductionSuresh Thangarajan100% (1)
- TIM Fungsi 1Документ40 страницTIM Fungsi 1lilikОценок пока нет
- Simultaneous EquationsДокумент11 страницSimultaneous EquationsSaleena AurangzaibОценок пока нет
- How Dna Controls The Workings of The CellДокумент2 страницыHow Dna Controls The Workings of The Cellapi-238397369Оценок пока нет
- HI-8592, HI-8593, HI-8594: Single-Rail ARINC 429 Differential Line DriverДокумент14 страницHI-8592, HI-8593, HI-8594: Single-Rail ARINC 429 Differential Line DriversameeppaiОценок пока нет
- Data Warehousing: Modern Database ManagementДокумент49 страницData Warehousing: Modern Database ManagementNgọc TrâmОценок пока нет
- Turbine Buyers Guide - Mick Sagrillo & Ian WoofendenДокумент7 страницTurbine Buyers Guide - Mick Sagrillo & Ian WoofendenAnonymous xYhjeilnZОценок пока нет
- Introduction - Week 2Документ37 страницIntroduction - Week 2Tayyab AhmedОценок пока нет
- Toyo ML210 thread cutting gear assembly drawingsДокумент12 страницToyo ML210 thread cutting gear assembly drawingsiril anwarОценок пока нет
- 1/2" Cellflex Superflexible Foam-Dielectric Coaxial Cable: SCF12-50JДокумент2 страницы1/2" Cellflex Superflexible Foam-Dielectric Coaxial Cable: SCF12-50JpeguigonsoОценок пока нет
- Rodi TestSystem EZSDI1 Iom D603Документ25 страницRodi TestSystem EZSDI1 Iom D603Ricardo AndradeОценок пока нет
- 1 05 Lab Crime Scene Sketch GAДокумент2 страницы1 05 Lab Crime Scene Sketch GAthis is hardly gonna be usedОценок пока нет
- Front Panel & Display Technical Data: User ManualДокумент2 страницыFront Panel & Display Technical Data: User ManualJulio PorleyОценок пока нет
- Propeller forces and typesДокумент2 страницыPropeller forces and typesEdison Gutierrez CapunoОценок пока нет
- Mathematics of Finance: Simple and Compound Interest FormulasДокумент11 страницMathematics of Finance: Simple and Compound Interest FormulasAshekin MahadiОценок пока нет
- c1Документ19 страницc1vgnagaОценок пока нет
- Regeln Map 2Документ2 страницыRegeln Map 2bruno.wetzelОценок пока нет
- Ze500 4 Parts Catalog en UsДокумент9 страницZe500 4 Parts Catalog en UsClaudia LopezОценок пока нет
- Line and Circle Drawing AlgorithmsДокумент57 страницLine and Circle Drawing AlgorithmsMILAN K JAIN B.Tech CSE B 2018-2022Оценок пока нет
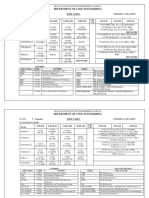
- Time TableДокумент7 страницTime TableChethan .H.GОценок пока нет
- Sec 2 French ImmersionДокумент1 страницаSec 2 French Immersionapi-506328259Оценок пока нет
- PDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressДокумент7 страницPDF Solution Manual For Gas Turbine Theory 6th Edition Saravanamuttoo Rogers CompressErickson Brayner MarBerОценок пока нет