Вам также может понравиться
- CE 579 Lecture8 Stability - Differential EquationsДокумент16 страницCE 579 Lecture8 Stability - Differential EquationsbsitlerОценок пока нет
- Beam BucklingДокумент23 страницыBeam BucklingMichael WaYОценок пока нет
- Elastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignДокумент45 страницElastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignTran Tuan KietОценок пока нет
- Unit IIДокумент37 страницUnit IIapi-352822682Оценок пока нет
- DefiniteIntegrals DPPДокумент52 страницыDefiniteIntegrals DPPAryan WasewarОценок пока нет
- ECE 373FE-09012017 - SolutionsДокумент7 страницECE 373FE-09012017 - Solutionsİsmail ŞahinОценок пока нет
- Multivariate Calculus Unit Two: M. A. Boateng, PHD., MimaДокумент26 страницMultivariate Calculus Unit Two: M. A. Boateng, PHD., MimaErnest YeboahОценок пока нет
- Differential Motions 3Документ4 страницыDifferential Motions 3Al-Amin BhuiyanОценок пока нет
- Advanced Fourier Eng+ItaДокумент46 страницAdvanced Fourier Eng+ItaLeonardo RubinoОценок пока нет
- Ece I YearДокумент48 страницEce I Yearpodixa7774Оценок пока нет
- Vibration and Noise 354: T X C T FДокумент3 страницыVibration and Noise 354: T X C T FMorena MoremoholoОценок пока нет
- KistlerДокумент3 страницыKistlerAlison RochaОценок пока нет
- Ps 5Документ2 страницыPs 5Henry HughesОценок пока нет
- Practical Application 01 W1 ERДокумент14 страницPractical Application 01 W1 ERenrico.michelatoОценок пока нет
- Foundation f-2 (Footing)Документ2 страницыFoundation f-2 (Footing)CECON STRUCTURALОценок пока нет
- Medical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsДокумент21 страницаMedical Image Processing (UBM1601) Unit - I Fundamentals of Medical Image Processing and TransformsAnj AnandОценок пока нет
- K0842000012015400304-05 Projective Geometry and Transformations of 3DДокумент30 страницK0842000012015400304-05 Projective Geometry and Transformations of 3DjeasdsdasdaОценок пока нет
- 5-3 Newton - S Divided Difference MethodДокумент11 страниц5-3 Newton - S Divided Difference MethodAlbert MartinezОценок пока нет
- Metoda Injumatatirii Metoda Newton Metoda IteratiilorДокумент2 страницыMetoda Injumatatirii Metoda Newton Metoda IteratiilorMike BrashОценок пока нет
- Frequency Domain Image ProcessingДокумент23 страницыFrequency Domain Image ProcessingSankalp_Kallakur_402Оценок пока нет
- L10 Beams 202324 - StevenДокумент54 страницыL10 Beams 202324 - StevenvictorigamiОценок пока нет
- Matematika Teknik Kimia 2Документ8 страницMatematika Teknik Kimia 2Nadiar Chairani RОценок пока нет
- Chapter4 1 Objectives and CodeДокумент15 страницChapter4 1 Objectives and Codelinthaw babyОценок пока нет
- Ch. 12: Static Equilibrium: Outline For 3/26Документ12 страницCh. 12: Static Equilibrium: Outline For 3/26Jhonny Zuasnabar PaucarОценок пока нет
- Lecture 4: 3-D TRUSS: Local X and Global X, Y and Z AxesДокумент8 страницLecture 4: 3-D TRUSS: Local X and Global X, Y and Z AxesJordan Empensando OliverosОценок пока нет
- Cse Iii Engineering Mathematics Iii 10mat31 Notes PDFДокумент138 страницCse Iii Engineering Mathematics Iii 10mat31 Notes PDFPPatilОценок пока нет
- The Logarithmic Mean Is A MeanДокумент5 страницThe Logarithmic Mean Is A MeanluishippОценок пока нет
- Fourier Series NotesДокумент18 страницFourier Series NotesHaziq PazliОценок пока нет
- Interpolation by Newtons Divided MethodДокумент11 страницInterpolation by Newtons Divided Methodtahiruabdulrahmanbaaba3Оценок пока нет
- Newton's Divided Difference Polynomial MethodДокумент9 страницNewton's Divided Difference Polynomial MethodAbdullah IyadОценок пока нет
- RM Sol ProbДокумент26 страницRM Sol ProbSankar KumarasamyОценок пока нет
- Shear Stresses in BeamsДокумент5 страницShear Stresses in Beamsafaq ahmad khanОценок пока нет
- Unit - Iii-B: ObjectiveДокумент5 страницUnit - Iii-B: ObjectiveRadha KrishnaОценок пока нет
- Param SummaryДокумент5 страницParam Summarynajek81Оценок пока нет
- Physics430 Lecture23Документ17 страницPhysics430 Lecture23González Trejo Mónica LizbethОценок пока нет
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Документ51 страницаChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirОценок пока нет
- Tranverse Shear Stress in Beams NotesДокумент4 страницыTranverse Shear Stress in Beams NotesAzzril HashimОценок пока нет
- Chapter 3. Intensity Transformation and Spatial FilteringДокумент38 страницChapter 3. Intensity Transformation and Spatial FilteringAyoub MohammedОценок пока нет
- Lec 7Документ40 страницLec 7Ahmet ArabОценок пока нет
- Presentation Magnetism 1594842079 208447Документ10 страницPresentation Magnetism 1594842079 208447Khilendra MandleОценок пока нет
- Line and Surface IntegralsДокумент38 страницLine and Surface IntegralsDinh LâmОценок пока нет
- I2ml3e Chap6Документ37 страницI2ml3e Chap6EMS Metalworking MachineryОценок пока нет
- Classification of Columns: Chapter 5 - Short ColumnДокумент20 страницClassification of Columns: Chapter 5 - Short ColumnCho Wing SoОценок пока нет
- MES 307 GM Getaran Paksa HarmonisДокумент38 страницMES 307 GM Getaran Paksa HarmonisNanda Diyah PitalokaОценок пока нет
- Name: Ramsha Nusrat Course: B.SC (Hons) Physics Sem:Vi ROLL NO.:16BPH027 Institution: Jamia Millia IslamiaДокумент14 страницName: Ramsha Nusrat Course: B.SC (Hons) Physics Sem:Vi ROLL NO.:16BPH027 Institution: Jamia Millia IslamiaArisha NusratОценок пока нет
- K03052 - 20200424155900 - 6.2 Applications of Integration - Volumes of RevolutionДокумент22 страницыK03052 - 20200424155900 - 6.2 Applications of Integration - Volumes of Revolutionhariz syazwan100% (1)
- Digital Signal Processing - U4Документ82 страницыDigital Signal Processing - U4Ashok BattulaОценок пока нет
- ESC201T L34 KmapДокумент33 страницыESC201T L34 KmapRachit MahajanОценок пока нет
- GT1 212 Ch02 BTДокумент6 страницGT1 212 Ch02 BTNguyễn Hữu ThọОценок пока нет
- SELFE Users Trainng Course - (1) SELFE Physical Formulation: Joseph Zhang, CMOP, OHSUДокумент34 страницыSELFE Users Trainng Course - (1) SELFE Physical Formulation: Joseph Zhang, CMOP, OHSUThierry Gnasiri Godwe HinsouОценок пока нет
- Giai Tich 2 Nam2017 Nhom 6 PDFДокумент3 страницыGiai Tich 2 Nam2017 Nhom 6 PDFhuongОценок пока нет
- Giai Tich 2 Nam2017 Nhom 6Документ3 страницыGiai Tich 2 Nam2017 Nhom 6huongОценок пока нет
- 13 - Waves and Sound-01-TheoryДокумент26 страниц13 - Waves and Sound-01-TheoryRaju SinghОценок пока нет
- Chapter 4 Multivariable Function and Its DifferentiationДокумент10 страницChapter 4 Multivariable Function and Its DifferentiationIsrael PopeОценок пока нет
- 10P NewtonsSecondLaw 1Документ11 страниц10P NewtonsSecondLaw 1Naman GuptaОценок пока нет
- Fourier Series, Fourier Integral, Fourier TransformДокумент29 страницFourier Series, Fourier Integral, Fourier Transformvasu_koneti5124Оценок пока нет
- Lecture# 8 (3-D Force System and Projection)Документ27 страницLecture# 8 (3-D Force System and Projection)Yosef almutairiОценок пока нет
- 02 - Internal Forces IДокумент20 страниц02 - Internal Forces Iabdullah BostancıОценок пока нет
- 5 - Moment About An AxisДокумент7 страниц5 - Moment About An AxisabasОценок пока нет
- Aits 1718 FT Ii Jeem PDFДокумент24 страницыAits 1718 FT Ii Jeem PDFsoumengoswami10Оценок пока нет
- Properties of Surfaces (Centre of Gravity & Moment of Inertia)Документ48 страницProperties of Surfaces (Centre of Gravity & Moment of Inertia)Tauseef100% (1)
- Revision Questions Phy094Документ8 страницRevision Questions Phy094NURUL FARRAH LIEYANA BT SHAMSUL BAHARIОценок пока нет
- Lab 1 HydraulicДокумент12 страницLab 1 HydraulicRuHuiОценок пока нет
- Sound EnergyДокумент24 страницыSound EnergyJhen BonОценок пока нет
- TOP 2-2-800 Center of GravityДокумент11 страницTOP 2-2-800 Center of Gravityalper bmcОценок пока нет
- Excel Engineering College, Komarapalayam: (Autonomous)Документ3 страницыExcel Engineering College, Komarapalayam: (Autonomous)mythilispd_355305156Оценок пока нет
- Physics 11 SummaryДокумент8 страницPhysics 11 SummaryJ100% (5)
- (Lecture - 2 - Updated) Dynamics of Structures Chapter 2 PDFДокумент37 страниц(Lecture - 2 - Updated) Dynamics of Structures Chapter 2 PDFMasood AhmedОценок пока нет
- Experiment 4 Pump CharacteristicsДокумент7 страницExperiment 4 Pump CharacteristicsJam JoОценок пока нет
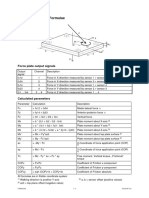
- Cutting Force MeasurementДокумент4 страницыCutting Force MeasurementVrushiket PatilОценок пока нет
- Finite Element Analysis of Saturated Sand Layer Under Earhtquake LoadingДокумент14 страницFinite Element Analysis of Saturated Sand Layer Under Earhtquake LoadingJorge PalominoОценок пока нет
- Mock Test Physics (ICSE CH 1 2 3)Документ4 страницыMock Test Physics (ICSE CH 1 2 3)Ishani MishraОценок пока нет
- Footing Design Joseph Sent To BentleyДокумент15 страницFooting Design Joseph Sent To BentleyfarrukhОценок пока нет
- Thesis PDFДокумент97 страницThesis PDFmostafa shahrabiОценок пока нет
- Chapter 02 - TorsionДокумент35 страницChapter 02 - Torsionsengthai100% (1)
- Research GateДокумент34 страницыResearch GateMustafa ÇakırОценок пока нет
- Water: Numerical Simulations of The Flow Field of A Submerged Hydraulic Jump Over Triangular MacroroughnessesДокумент24 страницыWater: Numerical Simulations of The Flow Field of A Submerged Hydraulic Jump Over Triangular MacroroughnessesRafael GonzalezОценок пока нет
- CE 4109: Design of Steel StructuresДокумент50 страницCE 4109: Design of Steel StructuresAfif AdnanОценок пока нет
- Design Calculation For Column Skirt SupportДокумент5 страницDesign Calculation For Column Skirt SupportRitesh VishambhariОценок пока нет
- Experiment 1 - Friction Losses in PipesДокумент34 страницыExperiment 1 - Friction Losses in PipesKhairil Ikram33% (3)
- PE 100 and PP Material Properties Sheet PDFДокумент2 страницыPE 100 and PP Material Properties Sheet PDFQuisperolandoОценок пока нет
- Transport Phenomena III: Mass Transfer Chapter 28: Convective Mass TransferДокумент23 страницыTransport Phenomena III: Mass Transfer Chapter 28: Convective Mass Transferنزار الدهاميОценок пока нет
- Introduction To Bond GraphsДокумент8 страницIntroduction To Bond GraphsamiritehОценок пока нет
- Science 6.5Документ6 страницScience 6.5Nestlee ArnaizОценок пока нет
- DOM Wheebox 719 Full Highlighted-MergedДокумент1 095 страницDOM Wheebox 719 Full Highlighted-MergedSunnyОценок пока нет
- Cxhapter 10Документ38 страницCxhapter 10sdrtfgОценок пока нет
- Physics FormulasДокумент10 страницPhysics FormulasMichael Uleau80% (5)
- Full Configuration Drag Estimation: Virginia Polytechnic Institute and State University, Blacksburg, Virginia, 24061-0203Документ24 страницыFull Configuration Drag Estimation: Virginia Polytechnic Institute and State University, Blacksburg, Virginia, 24061-0203dewantaraakbarОценок пока нет
- Abaqus Tutorial Instructions PDFДокумент4 страницыAbaqus Tutorial Instructions PDFDat HaОценок пока нет