Вам также может понравиться
- Esfuerzos y Deformaciones en Pavimentos FlexiblesДокумент36 страницEsfuerzos y Deformaciones en Pavimentos FlexiblesJeaneth JeanethОценок пока нет
- Esfuerzos y Deformaciones en Pavimentos FlexiblesДокумент36 страницEsfuerzos y Deformaciones en Pavimentos FlexiblesPaola Estefania NacimbaОценок пока нет
- III.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesДокумент36 страницIII.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesHector Salcedo100% (2)
- III.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesДокумент36 страницIII.1 Esfuerzos y Deformaciones en Pavimentos FlexiblesGeorge Jeisso Principe100% (1)
- LECCIÓN 10 - 1 PLACAS - ModifДокумент25 страницLECCIÓN 10 - 1 PLACAS - ModifPedroAgustínRodríguezIzquierdoОценок пока нет
- Semana1 Fisica 2023-1bДокумент18 страницSemana1 Fisica 2023-1bMaybe MaveОценок пока нет
- Apuntes Estab IIДокумент20 страницApuntes Estab IIdamianОценок пока нет
- Capitulo IV TeoriaДокумент114 страницCapitulo IV TeoriaJOSÉ GREGORIO GUZMAN ACEVEDOОценок пока нет
- Diseno Sismico de Reservorios 2009Документ58 страницDiseno Sismico de Reservorios 2009Jairo Moya MathinsonОценок пока нет
- 3.4. Deformaciones Por Rotación, Deformación Lineal y Angular, 3.5. Deformaciones y Direcciones Principales y 3.6. Ecuaciones de CompatibilidadДокумент36 страниц3.4. Deformaciones Por Rotación, Deformación Lineal y Angular, 3.5. Deformaciones y Direcciones Principales y 3.6. Ecuaciones de CompatibilidadAlan SepúlvedaОценок пока нет
- Estado de DeformaciónДокумент7 страницEstado de DeformaciónRex RyogaОценок пока нет
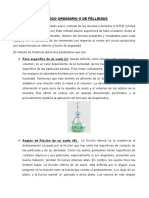
- Metodo Ordinario o de FelleniusДокумент7 страницMetodo Ordinario o de FelleniusEduardoCruzadoMendozaОценок пока нет
- 2° Clase Diplomado 22.07.21 Rev1Документ77 страниц2° Clase Diplomado 22.07.21 Rev1wilderОценок пока нет
- Laboratorio Fisica II Practica No 2 PendДокумент8 страницLaboratorio Fisica II Practica No 2 PendJesús ArriagaОценок пока нет
- Reologia de Polimeros PDFДокумент42 страницыReologia de Polimeros PDFtoloco1977100% (1)
- Esfuerzos y Deformaciones en Pavimentos Flexibles PDFДокумент59 страницEsfuerzos y Deformaciones en Pavimentos Flexibles PDFUlises Barraza M100% (2)
- Descripción Matemática de La DeformaciónДокумент4 страницыDescripción Matemática de La DeformaciónNandaly GarcíaОценок пока нет
- Diseño KENPAVEДокумент72 страницыDiseño KENPAVEDanitza Rosario Sucasaca Mamani100% (1)
- GEOTECNIA PP3 (2018-3) IДокумент83 страницыGEOTECNIA PP3 (2018-3) IPedro DuvanОценок пока нет
- Reporte Unidad 4 Y5 Medios ContinuosДокумент38 страницReporte Unidad 4 Y5 Medios ContinuosAndry-6193Оценок пока нет
- Examen Final Mecanica de Suelos Ii - 2001 Ii - ResueltoДокумент10 страницExamen Final Mecanica de Suelos Ii - 2001 Ii - ResueltoCarlos TLОценок пока нет
- Esfuerzo y Deformacion en Pav FlexiblesДокумент28 страницEsfuerzo y Deformacion en Pav Flexiblesayin otañe bendezuОценок пока нет
- Examen Final Mecanica de SuelosДокумент9 страницExamen Final Mecanica de SuelosarmerzonОценок пока нет
- 03 Torsion Barras PrismaticasДокумент10 страниц03 Torsion Barras PrismaticasJohansh Oviedo TapiaОценок пока нет
- Resumen de Modelos ViscoelásticosДокумент6 страницResumen de Modelos ViscoelásticosJorge MazabaОценок пока нет
- Mina PierinaДокумент15 страницMina PierinaJan Pol Rodriguez Aguirre100% (1)
- Análisis de Talud Por El Método de Las DovelasДокумент27 страницAnálisis de Talud Por El Método de Las DovelasJose C. Pérez100% (1)
- Vibraciones AmortiguadasДокумент4 страницыVibraciones AmortiguadasJose LaraОценок пока нет
- Modulo I: Propiedades Mecanicas Y Compresibilidad de Los SuelosДокумент24 страницыModulo I: Propiedades Mecanicas Y Compresibilidad de Los SuelosAlessandra AlvaradoОценок пока нет
- Teoria de ElasticidadДокумент30 страницTeoria de ElasticidadOtorthen Manziz100% (1)
- U3 S6 Identificación y Análisis de Esfuerzos Fenómenos de Consolidación Unidimensional y Resistencia Esfuerzo CortanteДокумент20 страницU3 S6 Identificación y Análisis de Esfuerzos Fenómenos de Consolidación Unidimensional y Resistencia Esfuerzo Cortantedanny9merino-1Оценок пока нет
- Estabilidad de Taludes Grupo 4Документ30 страницEstabilidad de Taludes Grupo 4roy flores gutierrezОценок пока нет
- Prof. Dr. Humberto Iván Pehovaz Alvarez Ciclo 2014-1Документ44 страницыProf. Dr. Humberto Iván Pehovaz Alvarez Ciclo 2014-1Kevin Osmar Gómez VizcardoОценок пока нет
- TORSIONДокумент10 страницTORSIONHector Paredes CernaОценок пока нет
- Tensiones Deformaciones PDFДокумент9 страницTensiones Deformaciones PDFMarce VissaniОценок пока нет
- Producto de InerciaДокумент18 страницProducto de InerciaAlejandro LopezОценок пока нет
- Clase de Ec. Dif. #17Документ8 страницClase de Ec. Dif. #17Mirio Arevalo BardalesОценок пока нет
- 08 Losas Delgadas KirchhoffДокумент42 страницы08 Losas Delgadas KirchhoffdlanorcivОценок пока нет
- Ecuaciones ConstitutivasДокумент6 страницEcuaciones ConstitutivasBETOОценок пока нет
- Esfuerzos FlexiblesДокумент85 страницEsfuerzos FlexiblesTracey CoffeyОценок пока нет
- Resort EsДокумент18 страницResort EsSiulcorpОценок пока нет
- Cap 1 E L Utilización - DeformaciónДокумент50 страницCap 1 E L Utilización - DeformaciónFrancisco GarayoОценок пока нет
- Examen Final Mecanica de Suelos Ii - 2001 Ii - ResueltoДокумент9 страницExamen Final Mecanica de Suelos Ii - 2001 Ii - ResueltodanielОценок пока нет
- Elementos de Mecanica Del Medio ContinuoДокумент8 страницElementos de Mecanica Del Medio ContinuoHector SeguraОценок пока нет
- Calculo de VigasДокумент22 страницыCalculo de Vigasskycoster100% (2)
- 18 Falla Por Vuelco (Final)Документ33 страницы18 Falla Por Vuelco (Final)Max Kevin Quintanilla OrellanaОценок пока нет
- ENSAYO de COMPRESIÓN-procesos de ManufacturaДокумент16 страницENSAYO de COMPRESIÓN-procesos de ManufacturaSebastian UscateguiОценок пока нет
- Topología y geometría diferencial con aplicaciones a la físicaОт EverandTopología y geometría diferencial con aplicaciones a la físicaРейтинг: 5 из 5 звезд5/5 (1)
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesОт EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesОценок пока нет
- Guía para el análisis y solución de problemas de resistencia de materialesОт EverandGuía para el análisis y solución de problemas de resistencia de materialesОценок пока нет
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoОт EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoРейтинг: 4.5 из 5 звезд4.5/5 (12)
- Balance de Energía - EjemploДокумент16 страницBalance de Energía - EjemploJennifer Catalina ArdilaОценок пока нет
- Delta H Sub IodoДокумент2 страницыDelta H Sub IodoDiego FigueroaОценок пока нет
- Equilibrio de Cuerpo Rigido en Dos DimensionesДокумент10 страницEquilibrio de Cuerpo Rigido en Dos DimensionesEdgar Esneyder Beltran JimenezОценок пока нет
- Tensiones en La Masa Del SueloДокумент34 страницыTensiones en La Masa Del SueloYeSy IreneОценок пока нет
- Física e CalorДокумент6 страницFísica e CalorCarolina SalcedoОценок пока нет
- Sem14a - Momentos de Inercias (Centroidales)Документ14 страницSem14a - Momentos de Inercias (Centroidales)Madeleine SAОценок пока нет
- Teoría EstructuralДокумент11 страницTeoría EstructuralJuan carlos RobleroОценок пока нет
- Egp Física 09.14Документ7 страницEgp Física 09.14david ayalaОценок пока нет
- Clase # 2Документ8 страницClase # 2Daniel NaviaОценок пока нет
- Resonancia y Sus AplicacionesДокумент9 страницResonancia y Sus Aplicacioneskaren giannella apaza apazaОценок пока нет
- Ensayo Destructivos Ciencia de Materiales 2014Документ18 страницEnsayo Destructivos Ciencia de Materiales 2014Sergio Ramiro Gonzales AguilarОценок пока нет
- Chevrolet Corsa Plus (2005-2009) Manual de Taller PDFДокумент2 187 страницChevrolet Corsa Plus (2005-2009) Manual de Taller PDFTomás Fuenzalida100% (3)
- F3.1 PAU MovimientoOscilatorio SolucДокумент16 страницF3.1 PAU MovimientoOscilatorio SolucJana Vecchio RomeroОценок пока нет
- Comportamiento de Los Materiales Dúctiles y Frágiles 2019 II 8va SesiónДокумент31 страницаComportamiento de Los Materiales Dúctiles y Frágiles 2019 II 8va SesiónJesús ChapoñanОценок пока нет
- Grasas CálcicasДокумент31 страницаGrasas CálcicasJaimito Erick VegaОценок пока нет
- Costos y BeneficiosДокумент7 страницCostos y BeneficiosIsaac Nolasco ZarateОценок пока нет
- Práctica 2Документ5 страницPráctica 2Julio Chuva Jr.Оценок пока нет
- 01 Unidad I - Columnas CortasДокумент11 страниц01 Unidad I - Columnas CortasAlvaro Jesus Torres QuispeОценок пока нет
- Manual de Servicio Suspensión Trasera Kenworth AG40, AG46, AG69Документ21 страницаManual de Servicio Suspensión Trasera Kenworth AG40, AG46, AG69auxiliar taller100% (3)
- Exposición HookeДокумент22 страницыExposición HookecharangaОценок пока нет
- Manual Usuario y Garantia Moto TXДокумент36 страницManual Usuario y Garantia Moto TXYuruanОценок пока нет
- CV Ing Eloy ApazaДокумент18 страницCV Ing Eloy ApazaDIEGOОценок пока нет
- Lubrax Industrial FPДокумент2 страницыLubrax Industrial FPCAGERIGOОценок пока нет
- Lab No 3 MaquinasДокумент9 страницLab No 3 MaquinasMauro LozОценок пока нет
- LECCIÓN 1 Compon Electromecanic 17.01.22 8AMДокумент81 страницаLECCIÓN 1 Compon Electromecanic 17.01.22 8AMCHUICA PERICHE MARIELENAОценок пока нет
- Ensayo - Procesos de Cambio de FormaДокумент22 страницыEnsayo - Procesos de Cambio de FormaFatima SalazarОценок пока нет
- Mpid Mpid-209 FormatoalumnotrabajofinalДокумент10 страницMpid Mpid-209 FormatoalumnotrabajofinalFabricioHPОценок пока нет
- Evaporador Múltiple EfectoДокумент7 страницEvaporador Múltiple EfectolightninfireОценок пока нет
- Alternador Quitar InstalarДокумент3 страницыAlternador Quitar InstalarignaciorechuchaОценок пока нет
- PyДокумент50 страницPyrosmery vargasОценок пока нет