Вам также может понравиться
- Arduino - Ultrasonic SensorДокумент17 страницArduino - Ultrasonic Sensormaruthi631Оценок пока нет
- Servicing Injector Nozzle PDFДокумент8 страницServicing Injector Nozzle PDFKifu Ye100% (1)
- 734 Opp Man GB PDFДокумент294 страницы734 Opp Man GB PDFAbo Achraf LaalawiОценок пока нет
- Home Security Alarm System Using Arduino Project Report PDFДокумент17 страницHome Security Alarm System Using Arduino Project Report PDFprassanth jaiОценок пока нет
- Microprocessor - Lab 6 StudentДокумент18 страницMicroprocessor - Lab 6 Studenttj millarОценок пока нет
- F-CD-19 Pipe and Weld Book 26-Abr-19Документ84 страницыF-CD-19 Pipe and Weld Book 26-Abr-19Jorge Isaac Lara RamosОценок пока нет
- Dental Materials Ch. 2 Flashcards - QuizletДокумент15 страницDental Materials Ch. 2 Flashcards - QuizletDENTAL REVIEWER ONLYОценок пока нет
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Документ13 страницInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Rajan Mullappilly100% (1)
- Industrial Training ReportДокумент24 страницыIndustrial Training ReportFadzrul Faiz100% (2)
- Material and Equipment Standard: IPS-M-EL-136Документ14 страницMaterial and Equipment Standard: IPS-M-EL-136Fatholla SalehiОценок пока нет
- Project Report On Obstacle Avoiding RobotДокумент13 страницProject Report On Obstacle Avoiding Robotarunraj SuresОценок пока нет
- Obstacle Avoiding Robot Using Ultrasonic SensorДокумент10 страницObstacle Avoiding Robot Using Ultrasonic SensorANIL KUMAR CSTSERVICESОценок пока нет
- Advance Robotics - Self - Learning Kit - ArduinoДокумент68 страницAdvance Robotics - Self - Learning Kit - ArduinoHarry George ElangbamОценок пока нет
- Design of Strip FootingДокумент8 страницDesign of Strip FootingJaime Manalili Landingin0% (1)
- Muhammad Izzul Irsyad Bin MD Idris 2019660098 Assignment 1 Case Study ENT600Документ8 страницMuhammad Izzul Irsyad Bin MD Idris 2019660098 Assignment 1 Case Study ENT600000Оценок пока нет
- Obstacle Avoiding RobotДокумент17 страницObstacle Avoiding RobotNishant Kamal93% (15)
- Smart Car Parking SensorsДокумент17 страницSmart Car Parking SensorsMinho Onions100% (1)
- Why The Interest in Hybrid Technology?: Bryan Nelson - Caterpillar, IncДокумент11 страницWhy The Interest in Hybrid Technology?: Bryan Nelson - Caterpillar, IncAnoj pahathkumburaОценок пока нет
- PQR A106 HAL-1Документ1 страницаPQR A106 HAL-1Budi Setia RahmanОценок пока нет
- Report BabaДокумент48 страницReport BabaFadzrul FaizОценок пока нет
- Arduino Project ReportДокумент16 страницArduino Project ReportBroAmirОценок пока нет
- L293D Motor Driver PDFДокумент6 страницL293D Motor Driver PDFPedro Cu Aguirre100% (1)
- Robotics and Automation Lab Report # 2Документ6 страницRobotics and Automation Lab Report # 2Ayaz ZafarОценок пока нет
- MEC522 PBL ArduinoDC MotorEncoder Close LoopДокумент4 страницыMEC522 PBL ArduinoDC MotorEncoder Close LoopeimanОценок пока нет
- Lab 1 DiscussionДокумент2 страницыLab 1 DiscussionBatrisyialya RusliОценок пока нет
- Direction Finder Qibla For The BlindДокумент10 страницDirection Finder Qibla For The BlindDcTur Stylo-p100% (1)
- Blueprint Outline ENT600 Technology EntrepreneurshipДокумент5 страницBlueprint Outline ENT600 Technology EntrepreneurshipSebastian Langkah0% (1)
- Presentation On Manufacturing Process of Gas OvanДокумент17 страницPresentation On Manufacturing Process of Gas OvanFiroj Md Shah100% (1)
- Arduino Robotics ReviseДокумент122 страницыArduino Robotics ReviseShanon MalzebaОценок пока нет
- Unsa Jan (033!19!0048) Robotics Lab 2Документ7 страницUnsa Jan (033!19!0048) Robotics Lab 2hande ercelОценок пока нет
- Sandeep BL - EN.U4ECE22022Документ61 страницаSandeep BL - EN.U4ECE22022ThanvithaОценок пока нет
- Obstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoДокумент5 страницObstacle Aviodance Robot Using Arduino: P.Iswarya D.Ramarao B.Dileep Kumar K.Dileep Kumar T.ManikyalaraoRichard Kaven SerquinaОценок пока нет
- LilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SДокумент13 страницLilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SFranco PalumboОценок пока нет
- Lab Experiment 12Документ3 страницыLab Experiment 12ffortuito.businessОценок пока нет
- Summer Training On ArduinoДокумент52 страницыSummer Training On ArduinoAakritiОценок пока нет
- Physics Projjecc EpiccДокумент14 страницPhysics Projjecc EpiccRahul AvdhaniОценок пока нет
- Obstacle Avoiding RobotДокумент17 страницObstacle Avoiding Robotukavnganesh2002Оценок пока нет
- Ecs Review#3Документ14 страницEcs Review#3pranay kumarОценок пока нет
- Obstacle Avoiding RobotДокумент17 страницObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Android App Development With Robotics Applications TrainingДокумент227 страницAndroid App Development With Robotics Applications TrainingENGRX44 NOTOGSWОценок пока нет
- 5 6066828862526850364Документ24 страницы5 6066828862526850364Vivek Kalpana Laxman NarsaleОценок пока нет
- Robotics - Level 1-v2Документ121 страницаRobotics - Level 1-v2ALPHEAUS-MBA AwajibenejiОценок пока нет
- Obstacle Avoiding RobotДокумент18 страницObstacle Avoiding RobotAJIN KОценок пока нет
- DT Project Sem 4Документ9 страницDT Project Sem 4Utkarsh YadavОценок пока нет
- Exp-1 4Документ5 страницExp-1 4AjayОценок пока нет
- Oel AutomationДокумент9 страницOel AutomationIzharullahОценок пока нет
- Maes - Lab 06Документ9 страницMaes - Lab 06leonalmessibd21Оценок пока нет
- Home Automation ReportДокумент52 страницыHome Automation ReportShashank PandeyОценок пока нет
- Ai Assistant Robot 2Документ22 страницыAi Assistant Robot 2krishnum khodke0% (1)
- Full Paper of Arduino Based Obstacle Avoidance RobotДокумент3 страницыFull Paper of Arduino Based Obstacle Avoidance RobotsabahatОценок пока нет
- Arduino ReportДокумент10 страницArduino ReportSrinan MarvelОценок пока нет
- Arduino ManualДокумент46 страницArduino ManualSparsh SaxenaОценок пока нет
- Iot Based Accident Prevention System Using Eye Blink Sensor-2Документ22 страницыIot Based Accident Prevention System Using Eye Blink Sensor-2rohithra2103Оценок пока нет
- Smart Dustbin Using AurdinoДокумент14 страницSmart Dustbin Using AurdinoShubham PatilОценок пока нет
- Arduino PresentationДокумент43 страницыArduino PresentationraamОценок пока нет
- ELEC5614 2014 Lab 2 - v1b PDFДокумент15 страницELEC5614 2014 Lab 2 - v1b PDFYanwen LeeОценок пока нет
- Digital AnalogДокумент40 страницDigital AnalogRyan Gelica PadayОценок пока нет
- Ecs Final Report-FasttrackДокумент14 страницEcs Final Report-Fasttrackpranay kumarОценок пока нет
- Bluetooth: ArduinoДокумент52 страницыBluetooth: ArduinoHavoc BarathОценок пока нет
- Department of Technical EducationДокумент12 страницDepartment of Technical EducationDinesh NОценок пока нет
- Lab06 Sheet K02 Deb3013Документ10 страницLab06 Sheet K02 Deb3013Suhaimi ShahabОценок пока нет
- Four-Legged Walking Robot: A Comprehensive Report On The QuadrupedДокумент10 страницFour-Legged Walking Robot: A Comprehensive Report On The QuadrupedArnav SharmaОценок пока нет
- IOT 2.3 - AlassoДокумент4 страницыIOT 2.3 - AlassoKaushik Kumar jhaОценок пока нет
- IR Proximity Sensor DatasheetДокумент5 страницIR Proximity Sensor DatasheetSampath Kumar100% (1)
- Obstacle Avoidance Robot ReportДокумент28 страницObstacle Avoidance Robot ReportFadzrul Faiz100% (1)
- Arduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Документ11 страницArduino Based Obstacle Avoiding Robot: Electrical Engineering Department 6 Semester, Batch 2017, Section (A)Spring SuperbОценок пока нет
- Advanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2Документ3 страницыAdvanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2xoxoОценок пока нет
- Lab Cover Sheet: American International University-BangladeshДокумент7 страницLab Cover Sheet: American International University-BangladeshMahiОценок пока нет
- Bluetoothn Arduino UnoДокумент4 страницыBluetoothn Arduino UnoNagaОценок пока нет
- Security Alarm System Based On Pir Sensor: Rizvi College of EngineeringДокумент12 страницSecurity Alarm System Based On Pir Sensor: Rizvi College of EngineeringCezzane KhanОценок пока нет
- Security Alarm System Based On Pir Sensor: Rizvi College of EngineeringДокумент12 страницSecurity Alarm System Based On Pir Sensor: Rizvi College of EngineeringCezzane KhanОценок пока нет
- A Review Paper On Effects of Different IДокумент5 страницA Review Paper On Effects of Different IFadzrul FaizОценок пока нет
- Mohamad Afiq Bin Ahmad - SustainableДокумент16 страницMohamad Afiq Bin Ahmad - SustainableFadzrul FaizОценок пока нет
- Bulan Abdullah (Prof. Madya Ir. Ts. DR.) : Mec600 - Engineer in SocietyДокумент13 страницBulan Abdullah (Prof. Madya Ir. Ts. DR.) : Mec600 - Engineer in SocietyFadzrul FaizОценок пока нет
- Official Letter UitmДокумент1 страницаOfficial Letter UitmFadzrul FaizОценок пока нет
- Obstacle Avoidance Robot ReportДокумент28 страницObstacle Avoidance Robot ReportFadzrul Faiz100% (1)
- Applied Electronics and Microprocessor (Mec 523) Mini Project For Small and Medium Size Industries (Smis)Документ1 страницаApplied Electronics and Microprocessor (Mec 523) Mini Project For Small and Medium Size Industries (Smis)Fadzrul FaizОценок пока нет
- Test 1 OshaДокумент8 страницTest 1 OshaFadzrul FaizОценок пока нет
- r44 - MM - 2 INSPECTIONДокумент66 страницr44 - MM - 2 INSPECTIONSiswadiОценок пока нет
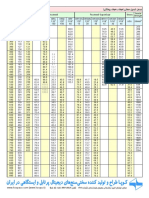
- Hardness Conversion Table: Tensile StrengthДокумент1 страницаHardness Conversion Table: Tensile StrengthMehdy HosseiniОценок пока нет
- Group 1 Batch Sedimentation Solid SeparationДокумент7 страницGroup 1 Batch Sedimentation Solid SeparationEva Valentino CapiliОценок пока нет
- Gujarat Technological UniversityДокумент3 страницыGujarat Technological UniversityTОценок пока нет
- Heat Flux Simulation On ABAQUSДокумент10 страницHeat Flux Simulation On ABAQUSMuhammad WaqasОценок пока нет
- Subject Name:Electrical Machines-IДокумент3 страницыSubject Name:Electrical Machines-IAkhil VemulaОценок пока нет
- Pneumatic & Electric-Actuator-Product-Guide - EL-O-Macho - Emerson PDFДокумент24 страницыPneumatic & Electric-Actuator-Product-Guide - EL-O-Macho - Emerson PDFSaswita SaktiОценок пока нет
- Cambridge International AS & A Level: Mathematics 9709/42Документ16 страницCambridge International AS & A Level: Mathematics 9709/42Huzaim SulaimanОценок пока нет
- ATD Lab ManualsДокумент124 страницыATD Lab ManualsN200266 PONNAGANTI SHEKARОценок пока нет
- 1-2 R13 Old Papers Oct 2015Документ11 страниц1-2 R13 Old Papers Oct 2015Venkat Rayudu AngisettiОценок пока нет
- 06、轻型冷水机组出厂试验大纲(中英文)Документ24 страницы06、轻型冷水机组出厂试验大纲(中英文)nur hasanОценок пока нет
- 2-Basics Electronics TwoДокумент42 страницы2-Basics Electronics TwoOmar EzzОценок пока нет
- University Thermodynamics Laboratory Report (Ratio of Volume)Документ5 страницUniversity Thermodynamics Laboratory Report (Ratio of Volume)Jackson KcОценок пока нет
- C9 - Modern Robotics Mechanics, Planning, and Control by Frank C. Park Kevin M. Lynch - 2Документ1 страницаC9 - Modern Robotics Mechanics, Planning, and Control by Frank C. Park Kevin M. Lynch - 2Thế AnhОценок пока нет
- Es70 56 JSXДокумент72 страницыEs70 56 JSXKhushi PatelОценок пока нет
- Compressed Air System: Ramadhan Muhammad Naufal (21030117190181) Bimo Setio Wicaksono (21030117190174)Документ11 страницCompressed Air System: Ramadhan Muhammad Naufal (21030117190181) Bimo Setio Wicaksono (21030117190174)Bimo S WicaksonoОценок пока нет
- GHR32QVДокумент99 страницGHR32QVdwilhОценок пока нет
- Exam 13Документ5 страницExam 13mohansiwan2025Оценок пока нет
- Welding Defects:: Welding Defects Types, Diagram, Causes and Remedies, PDF. HereДокумент6 страницWelding Defects:: Welding Defects Types, Diagram, Causes and Remedies, PDF. HereWilberZangaОценок пока нет
- Interceptor Specifications FinalДокумент7 страницInterceptor Specifications FinalAchint VermaОценок пока нет
- Diaphragm-Seal Type Pressure Gauges: OutlineДокумент40 страницDiaphragm-Seal Type Pressure Gauges: OutlineFadlul Akbar HerfiantoОценок пока нет