Вам также может понравиться
- 12 Termo Aceite Proj PDFДокумент1 страница12 Termo Aceite Proj PDFcaretronicsОценок пока нет
- IFRS-Aula 2 - Diagrama CDUДокумент27 страницIFRS-Aula 2 - Diagrama CDUcaretronicsОценок пока нет
- Protocolo HTTP AluraДокумент99 страницProtocolo HTTP AluracaretronicsОценок пока нет
- Curso JQuery Alura PDFДокумент136 страницCurso JQuery Alura PDFcaretronicsОценок пока нет
- Curso de UML AluraДокумент48 страницCurso de UML AluracaretronicsОценок пока нет
- Apresentacao Rest PDFДокумент39 страницApresentacao Rest PDFcaretronicsОценок пока нет
- Aula 1 - Introdução PDFДокумент43 страницыAula 1 - Introdução PDFcaretronicsОценок пока нет
- Algoritmo Avanc Und 00 PDFДокумент13 страницAlgoritmo Avanc Und 00 PDFcaretronicsОценок пока нет
- 32 - TIC 17 RGTiДокумент1 страница32 - TIC 17 RGTiSidsambangaОценок пока нет
- 10 Muros de Berlim e Muros de Munique - 13 Aula Teórica - CORДокумент55 страниц10 Muros de Berlim e Muros de Munique - 13 Aula Teórica - COREdgar RibeiroОценок пока нет
- Capítulo 2 - PROPRIEDADES FÍSICAS DA MADEIRAДокумент4 страницыCapítulo 2 - PROPRIEDADES FÍSICAS DA MADEIRAAndressa Gontijo LucenaОценок пока нет
- Clima ShopДокумент8 страницClima ShopJefferson Nunes DamacenaОценок пока нет
- Como Assinar Um Documento Digitalmente PDFДокумент2 страницыComo Assinar Um Documento Digitalmente PDFSabinОценок пока нет
- My 2020 - 20a.5b1.bup.66 PDFДокумент245 страницMy 2020 - 20a.5b1.bup.66 PDFTiago SachielОценок пока нет
- UhuhДокумент592 страницыUhuhLuciomarRodriguesОценок пока нет
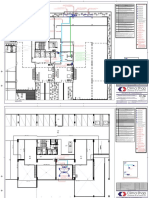
- De Oe 375 01 R2Документ70 страницDe Oe 375 01 R2Chronus AutomaçãoОценок пока нет
- Tabela de AnionsДокумент1 страницаTabela de AnionsdetonatomОценок пока нет
- DNPMaster BRДокумент21 страницаDNPMaster BRLucas BrantОценок пока нет
- TermofixosДокумент19 страницTermofixosCarlos HernandezОценок пока нет
- Resumo Ciclos - J Lucas MonteiroДокумент5 страницResumo Ciclos - J Lucas MonteiroLucas MonteiroОценок пока нет
- Dicionário de Termos Da QualidadeДокумент6 страницDicionário de Termos Da QualidadeAlaor Sales100% (1)
- Catalogo MAGNUMДокумент12 страницCatalogo MAGNUMTheMrBrazОценок пока нет
- NBR13579-1 - Arquivo para ImpressãoДокумент16 страницNBR13579-1 - Arquivo para ImpressãoRudiney TrombettaОценок пока нет
- A Nova Norma Abnt NBR Iso 19011Документ5 страницA Nova Norma Abnt NBR Iso 19011GizeleBaldoОценок пока нет
- Desbloqueando PS3 Com Custom Firmware 3Документ4 страницыDesbloqueando PS3 Com Custom Firmware 3Marcos Dos ReisОценок пока нет
- Janela de Overton e Engenharia SocialДокумент8 страницJanela de Overton e Engenharia SocialfriendbrasilshuОценок пока нет
- Manual Arquiteto JanelaДокумент5 страницManual Arquiteto JanelaAlexandre AlmeidaОценок пока нет
- Apostila Delphi Cliente ServidorДокумент132 страницыApostila Delphi Cliente ServidormichelmullernhОценок пока нет
- En 350 CatalogoДокумент2 страницыEn 350 CatalogoDouglas LeandroОценок пока нет
- Manual Cme 102 CavfДокумент101 страницаManual Cme 102 CavfAndré BastosОценок пока нет
- HP Nz2 REV F 0915Документ41 страницаHP Nz2 REV F 0915rmartins_239474100% (2)
- Tema I e II. InertesДокумент33 страницыTema I e II. InertesBiNga Salomão BengalaОценок пока нет
- Fispq Asseptgel CristalДокумент8 страницFispq Asseptgel CristalRebeccaОценок пока нет
- Professor ParabellumДокумент416 страницProfessor ParabellumRael ISMОценок пока нет
- Resolução RDC 216 ANVISAДокумент16 страницResolução RDC 216 ANVISACristiano RéboliОценок пока нет
- Manual HDD Re GeneratorДокумент5 страницManual HDD Re GeneratorGuilherme GonzalezОценок пока нет
- CCM BT - WegДокумент16 страницCCM BT - WegOzéias LopesОценок пока нет
- Ahmedetal2010 ACIStNEBTbeamsVol107No1Документ11 страницAhmedetal2010 ACIStNEBTbeamsVol107No1Jeferson Pereira SilvaОценок пока нет