Вам также может понравиться
- Amplificadores OperacionalesДокумент2 страницыAmplificadores OperacionalesOscar HernándezОценок пока нет
- Laboratorio 1Документ13 страницLaboratorio 1ELIAN EDMUNDO ARENAS YATACOОценок пока нет
- Rectificador Monofasico Semi-ControladoДокумент20 страницRectificador Monofasico Semi-ControladoSANTIAGO FELIPE ARIZA LONDONOОценок пока нет
- Movimiento de RototraslacionДокумент6 страницMovimiento de RototraslacionFranciscoОценок пока нет
- Practica 5 Simulacion de Funciones de Transferencia en SimulinkДокумент7 страницPractica 5 Simulacion de Funciones de Transferencia en SimulinkBraulio ala andiaОценок пока нет
- Informe DC A ACДокумент10 страницInforme DC A ACHectorVargasОценок пока нет
- Simulacion Analogica y Digital de Sistemas MecánicosДокумент8 страницSimulacion Analogica y Digital de Sistemas MecánicosSergio VeraОценок пока нет
- Practica 3 LaboratorioДокумент4 страницыPractica 3 Laboratorioroger betancourth100% (1)
- Laboratorio#3Документ5 страницLaboratorio#3Sergio100% (1)
- Modelado Matemático Amp OperacionalДокумент4 страницыModelado Matemático Amp OperacionalFrancisco Jose Campo SanchezОценок пока нет
- Señales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesДокумент73 страницыSeñales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDcuevase1Оценок пока нет
- Ejemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansДокумент42 страницыEjemplo #1. Ejemplo #1.: Análisis Del Lugar Geométrico de Las Raíces (LGR) Ó Método de EvansBrayan100% (1)
- Control Moderno Ogata Ejercicios 8Документ12 страницControl Moderno Ogata Ejercicios 8DavidОценок пока нет
- Matrices de Transformación Homogénea 4DДокумент6 страницMatrices de Transformación Homogénea 4DJuan Carlos LudwigОценок пока нет
- Informe Practica #4 Diodos SujetadoresДокумент18 страницInforme Practica #4 Diodos SujetadoresFrancisco ImbachiОценок пока нет
- Euler Lagrange Equipo 5Документ10 страницEuler Lagrange Equipo 5Alexis L.M.Оценок пока нет
- Práctica 1 Dimmer DigitalДокумент9 страницPráctica 1 Dimmer DigitalSergio RCОценок пока нет
- Ejercicio 1Документ2 страницыEjercicio 1Diego A CruzОценок пока нет
- Flip Flop T, JKДокумент6 страницFlip Flop T, JKRosita Romero SОценок пока нет
- Capitulo 8 WordДокумент104 страницыCapitulo 8 Word....Оценок пока нет
- Variables de EstadoДокумент49 страницVariables de EstadoRobertt Stone100% (1)
- Módulo CCP - Comparador, Captura y PWMДокумент10 страницMódulo CCP - Comparador, Captura y PWMJose Luis Rosario SalvadorОценок пока нет
- Respuesta A Una Señal Escalón de Una Planta Simulada Con Proteus Design SuitДокумент7 страницRespuesta A Una Señal Escalón de Una Planta Simulada Con Proteus Design SuitLuz Elena M. PossoОценок пока нет
- Respuesta en El Tiempo de Sistemas de Primer OrdenДокумент4 страницыRespuesta en El Tiempo de Sistemas de Primer OrdenergrОценок пока нет
- Reporte de Lab Control Analogico II No.2Документ4 страницыReporte de Lab Control Analogico II No.2Estudiante WhiteHatОценок пока нет
- 2019 B PDS CAP 02 Dominio TransformadoДокумент52 страницы2019 B PDS CAP 02 Dominio TransformadoJoseQuispeCamiОценок пока нет
- Marco TeoricoДокумент3 страницыMarco TeoricoJhonatan SangovalinОценок пока нет
- Unidad 9 Osciladores y TemporizadoresДокумент29 страницUnidad 9 Osciladores y Temporizadoresramiro110620110% (1)
- Banderas AVR MicrocontroladorДокумент3 страницыBanderas AVR MicrocontroladorAlejandro Colorado100% (1)
- Resumen Del SCRДокумент6 страницResumen Del SCRGustavo Gress GonzálezОценок пока нет
- Ej 3-Labo1 PDSДокумент8 страницEj 3-Labo1 PDSTadokaDragneelОценок пока нет
- Lab 7.0Документ20 страницLab 7.0Paula MéndezОценок пока нет
- Diagramas P&id PDFДокумент22 страницыDiagramas P&id PDFhugoОценок пока нет
- Reporte Practica 7Документ13 страницReporte Practica 7Alan LongoriaОценок пока нет
- T 2 Ejercicios 1Документ7 страницT 2 Ejercicios 1jose guadalupeОценок пока нет
- Informe Lab 1 SeñalesДокумент10 страницInforme Lab 1 SeñalesNicolay Leonardo Cifuentes FernandezОценок пока нет
- Practica 1 Teoria de ControlДокумент44 страницыPractica 1 Teoria de ControlRoberto LopezОценок пока нет
- Ejercicios Capitulo 1 - Tratamiento Digital de Senales 4 EdДокумент4 страницыEjercicios Capitulo 1 - Tratamiento Digital de Senales 4 EdElton Lara TovarОценок пока нет
- Amplificador Operacional IntegradorДокумент4 страницыAmplificador Operacional IntegradorWladimir EspinОценок пока нет
- Reporte Practica 2Документ9 страницReporte Practica 2carlosОценок пока нет
- Proyecto Calculo VectorialДокумент9 страницProyecto Calculo VectorialRoberto Leon0% (1)
- Dominio Del Tiempo y FasoresДокумент16 страницDominio Del Tiempo y FasoresOrlando ManriqueОценок пока нет
- Control Ad or de Tiempo Finito (Dead Beat)Документ66 страницControl Ad or de Tiempo Finito (Dead Beat)Ruben de los SantosОценок пока нет
- Ejercicios Circuitos Electronico 1Документ10 страницEjercicios Circuitos Electronico 1Pablo V SalazarОценок пока нет
- Espectro y Convolución de FuncionesДокумент6 страницEspectro y Convolución de FuncionesJeff PGОценок пока нет
- Reglas para La Construcción Del Lugar de Raíces de Un SistemaДокумент5 страницReglas para La Construcción Del Lugar de Raíces de Un Sistemamdonnet9Оценок пока нет
- Principio de Operación y Parámetros de Rendimiento de Inversores Alejandra AraqueДокумент3 страницыPrincipio de Operación y Parámetros de Rendimiento de Inversores Alejandra AraqueAlejandra AraqueОценок пока нет
- Proyecto Pendulo InvertidoДокумент13 страницProyecto Pendulo InvertidoJohn WinchesterОценок пока нет
- Practica 1 Electronica DigitalДокумент5 страницPractica 1 Electronica Digitalsamantha galiciaОценок пока нет
- Multimetro AnalogicoДокумент9 страницMultimetro AnalogicoGerman OrlandoОценок пока нет
- Taller I CorteДокумент3 страницыTaller I Cortemauro ibarraОценок пока нет
- Sistemas de Control Utp PDFДокумент11 страницSistemas de Control Utp PDFAlexander Castillo MaytaОценок пока нет
- Variable de Estado Por RealimentaciónДокумент7 страницVariable de Estado Por Realimentaciónalenno1Оценок пока нет
- Circuito Controlador de Ángulo de Disparo Con SCR en Onda CompletaДокумент7 страницCircuito Controlador de Ángulo de Disparo Con SCR en Onda CompletaAguirre Borja Benur AlonsoОценок пока нет
- Practica MultivibradoresДокумент10 страницPractica MultivibradoresFrancisco LopezОценок пока нет
- SNubberДокумент7 страницSNubberCarlos Eduardo SalazarОценок пока нет
- Laboratorio 2 Amplificador de Instrumentación RespuestaДокумент5 страницLaboratorio 2 Amplificador de Instrumentación RespuestaNicolas CordobaОценок пока нет
- 1.7.-Controladores y Compensadores Con OPAMPДокумент22 страницы1.7.-Controladores y Compensadores Con OPAMPMaycool CarriónОценок пока нет
- VI. Repuesta A La Frecuencia ModificadoДокумент22 страницыVI. Repuesta A La Frecuencia ModificadoMichel SantosОценок пока нет
- CLASE 3 GPДокумент26 страницCLASE 3 GPmayquer lin delgadillo perezОценок пока нет
- Clases Subestaciones - Sistemas de DistribucionesДокумент14 страницClases Subestaciones - Sistemas de Distribucionesmayquer lin delgadillo perezОценок пока нет
- SESION #16 Seguridad Electrica Por Lado de Usuarios 2Документ36 страницSESION #16 Seguridad Electrica Por Lado de Usuarios 2mayquer lin delgadillo perezОценок пока нет
- Diseño Controladores Con Rltool de MatlabДокумент77 страницDiseño Controladores Con Rltool de Matlabmayquer lin delgadillo perezОценок пока нет
- Clases Subestaciones - Red ElectricaДокумент21 страницаClases Subestaciones - Red Electricamayquer lin delgadillo perez100% (1)
- CLASES DE SUBESTACIONES - 1 DETERMINACION DEL BIL - Modelo de Onda NormalizadoДокумент5 страницCLASES DE SUBESTACIONES - 1 DETERMINACION DEL BIL - Modelo de Onda Normalizadomayquer lin delgadillo perezОценок пока нет
- Clases Subestaciones - Calculo de CortocircuitoДокумент7 страницClases Subestaciones - Calculo de Cortocircuitomayquer lin delgadillo perezОценок пока нет
- Calculador de CoordenadasДокумент7 страницCalculador de Coordenadasmayquer lin delgadillo perezОценок пока нет
- 1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDДокумент40 страниц1.4 Diseño de Compensador Adelanto-Atraso y Controlador PIDCondezoОценок пока нет
- Diseño Control Prop. Adelanto de FaseДокумент66 страницDiseño Control Prop. Adelanto de Fasemayquer lin delgadillo perezОценок пока нет
- Silabo Cont Automatico II-2020-IДокумент10 страницSilabo Cont Automatico II-2020-Imayquer lin delgadillo perezОценок пока нет
- Silabo Subestaciones de PotenciaДокумент7 страницSilabo Subestaciones de Potenciamayquer lin delgadillo perezОценок пока нет
- TEORIA - SUBESTACION DE POTENCIA, Elementos Basico, SEMANA1 - 2Документ72 страницыTEORIA - SUBESTACION DE POTENCIA, Elementos Basico, SEMANA1 - 2mayquer lin delgadillo perezОценок пока нет
- huancayo NOC 2 - SALDO - OBRA - MANO DE OBRA - PABLO ROJAS草版合同Документ23 страницыhuancayo NOC 2 - SALDO - OBRA - MANO DE OBRA - PABLO ROJAS草版合同mayquer lin delgadillo perezОценок пока нет
- III BimestreДокумент105 страницIII BimestreCavia-agro Cavia-agroОценок пока нет
- Osciloscopio AutomotrizДокумент12 страницOsciloscopio AutomotrizPaul Galeas100% (1)
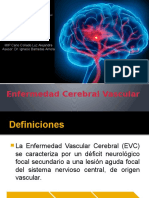
- Enfermedad Cerebral VascularДокумент25 страницEnfermedad Cerebral VascularAlejandra Cano ColladoОценок пока нет
- Pablollumiluisa Estadística 7Документ7 страницPablollumiluisa Estadística 7Pablo Llumiluisa100% (1)
- EdafosferaДокумент23 страницыEdafosferaFer MartellОценок пока нет
- Tarea 1 - SO - Luis MezaДокумент3 страницыTarea 1 - SO - Luis MezaLuis MezaОценок пока нет
- Apus Panama 23-12Документ102 страницыApus Panama 23-12Fernando SanchezОценок пока нет
- Cuadro Concentrador - Crecimiento y Desarrollo EconómicoДокумент6 страницCuadro Concentrador - Crecimiento y Desarrollo EconómicoDañe CabreraОценок пока нет
- Informe Academico Gambiental1raunidadДокумент3 страницыInforme Academico Gambiental1raunidadJessicaОценок пока нет
- 9no MATEMA Planificación MicrocurricularДокумент2 страницы9no MATEMA Planificación MicrocurricularDiego VelОценок пока нет
- Pilotes Encepados y Vigas de AtadoДокумент24 страницыPilotes Encepados y Vigas de AtadoJUANBOGOTAОценок пока нет
- Surgical Site Infections in - En.esДокумент16 страницSurgical Site Infections in - En.esANGIE CAMILA CASTILLO LOPEZОценок пока нет
- Sistema de Tres EcuacionesДокумент33 страницыSistema de Tres EcuacionesyoandrisОценок пока нет
- Reparación de Fuentes de Poder by EnigmaelectronicaДокумент32 страницыReparación de Fuentes de Poder by EnigmaelectronicaJesus Jhonny Quispe Rojas100% (1)
- Características de Personalidad de Varones Imputados Por Violencia Familiar PDFДокумент6 страницCaracterísticas de Personalidad de Varones Imputados Por Violencia Familiar PDFRomy BlottaОценок пока нет
- Percepcion Visual PorterosДокумент17 страницPercepcion Visual Porterosjuanjoromi100% (1)
- Diques Transversales Metodo de Explotacixn Minero X AmbientalДокумент4 страницыDiques Transversales Metodo de Explotacixn Minero X AmbientalLeonardo Octavio Olarte SánchezОценок пока нет
- Ejercicio 1-4 Hibbeller Rev1Документ2 страницыEjercicio 1-4 Hibbeller Rev1Estefany SanchezОценок пока нет
- Pat Paita - 14 - 06 - 19Документ234 страницыPat Paita - 14 - 06 - 19Hugo Labra100% (2)
- N KjeldahlДокумент6 страницN KjeldahlMarioОценок пока нет
- Infografia Bienestar EstudiantilДокумент6 страницInfografia Bienestar EstudiantilAnaОценок пока нет
- Mapa Conceptual de Riesgos QuimicosДокумент1 страницаMapa Conceptual de Riesgos QuimicosNiver Marquez SarmientoОценок пока нет
- Ingeniería de Los Incas 2Документ9 страницIngeniería de Los Incas 2CueLLiDurOОценок пока нет
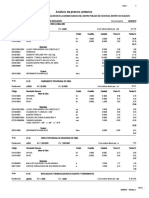
- Costos UnitariosДокумент33 страницыCostos UnitariosmilenaОценок пока нет
- Conjuros Clerigo Nivel 2Документ2 страницыConjuros Clerigo Nivel 2Nicolàs Temachtiani Aranda AlvarezОценок пока нет
- PASO1: Determinar El Rango R Xmax XminДокумент19 страницPASO1: Determinar El Rango R Xmax XminJuliana Espinoza Martinez0% (1)
- Presentacion - Ptdi - Sub AlcaldiasДокумент27 страницPresentacion - Ptdi - Sub Alcaldiasedgar condoriОценок пока нет
- Removedor de ErrumbreДокумент2 страницыRemovedor de ErrumbreRuben Rocha AguilarОценок пока нет
- Violacion Art. 7 de La Ley 13.512. Violacion Reglamento de Copropiedad. Demolicion de Obra Nueva.Документ3 страницыViolacion Art. 7 de La Ley 13.512. Violacion Reglamento de Copropiedad. Demolicion de Obra Nueva.RaimundoRayworldОценок пока нет
- Ic-Man-25.15.r01 - Manejo de Equipo Testo 350 NewДокумент5 страницIc-Man-25.15.r01 - Manejo de Equipo Testo 350 NewYOMIRA ALARCON DURANОценок пока нет