Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- National Telecommunication Corporation (NTC)Документ40 страницNational Telecommunication Corporation (NTC)Faheem Sajid100% (1)
- Adelio Lattuada TL10AV & TL10Документ7 страницAdelio Lattuada TL10AV & TL10yaser radОценок пока нет
- Tutorial - How To Use The Poser Format ExporterДокумент7 страницTutorial - How To Use The Poser Format ExporterMimhypopbummilha SwuОценок пока нет
- 10) C2 Trigonometrical Identities and Equations QuestionsДокумент26 страниц10) C2 Trigonometrical Identities and Equations QuestionsBoxOneTwoОценок пока нет
- Cells Bio-120-Exercise-4Документ7 страницCells Bio-120-Exercise-4Paolo TenorioОценок пока нет
- HyperMILL Readme enДокумент20 страницHyperMILL Readme enjimОценок пока нет
- Direct Synthesis of Sodalite From Kaolin: The Influence of AlkalinityДокумент7 страницDirect Synthesis of Sodalite From Kaolin: The Influence of AlkalinityIsye RahmaenaОценок пока нет
- Chapter 3 Ni ChupaghettiДокумент2 страницыChapter 3 Ni ChupaghettiRodemar RosarioОценок пока нет
- Lecture-V Reaction and Separation SystemДокумент54 страницыLecture-V Reaction and Separation SystemErmias AbelnehОценок пока нет
- Modding ManualДокумент25 страницModding ManualSebastian SallerОценок пока нет
- The Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignДокумент6 страницThe Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignmewarulesОценок пока нет
- Operating and Maintenance Manual 322375H01 Rev CДокумент82 страницыOperating and Maintenance Manual 322375H01 Rev CGustavo BarbosaОценок пока нет
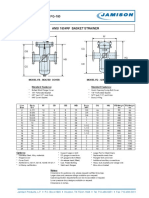
- FB-150 FQ-150 Basket StrainerДокумент1 страницаFB-150 FQ-150 Basket Strainerklich77Оценок пока нет
- BMG Idle CatlogueДокумент20 страницBMG Idle Catloguechintan mistryОценок пока нет
- Review For Final ExamДокумент29 страницReview For Final ExamhaddanОценок пока нет
- Microsoft OfficeДокумент1 страницаMicrosoft OfficesavinaumarОценок пока нет
- IECEx INE 12.0010X 002Документ9 страницIECEx INE 12.0010X 002Marcos SiqueiraОценок пока нет
- BIBLIOMETRICДокумент30 страницBIBLIOMETRICkalaranishanmuganathОценок пока нет
- How Microprocessors Work PDFДокумент2 страницыHow Microprocessors Work PDFdanielconstantin4Оценок пока нет
- Medical Laboratory Technology Journal: Kadar Vitamin C Jeruk Sunkist Peras Dan Infused WaterДокумент5 страницMedical Laboratory Technology Journal: Kadar Vitamin C Jeruk Sunkist Peras Dan Infused WaterlinggaОценок пока нет
- Fiat Barchetta: EngineДокумент20 страницFiat Barchetta: EngineHallex OliveiraОценок пока нет
- Alarm ListДокумент4 страницыAlarm ListMirela Perenda ŠabićОценок пока нет
- Design Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleДокумент11 страницDesign Method of 6-Element Boundary Gain For LLC Resonant Converter of Electric VehicleSh M AaqibОценок пока нет
- MS Word 3Документ2 страницыMS Word 3Misha RaviОценок пока нет
- Python Fundamentals SheetДокумент29 страницPython Fundamentals Sheetwp1barabaОценок пока нет
- Code Division DuplexingДокумент19 страницCode Division DuplexingNitin SakpalОценок пока нет
- 1 - Classful Ip AddressingДокумент6 страниц1 - Classful Ip AddressingBiruk Tesfaye Legesse100% (1)
- Squall (Better) Training Manual: ModelsДокумент83 страницыSquall (Better) Training Manual: ModelsSilomo-saka MambaОценок пока нет
- Effect of Moisture Absorption On The Properties of Natural FiberДокумент6 страницEffect of Moisture Absorption On The Properties of Natural FiberIsmadi IsmadiОценок пока нет
- Buenos Aires, Argentina Sabe/Aep Rnpzrwy31: JeppesenДокумент1 страницаBuenos Aires, Argentina Sabe/Aep Rnpzrwy31: Jeppesenfrancisco buschiazzoОценок пока нет