Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Thermal Physics Questions IB Question BankДокумент43 страницыThermal Physics Questions IB Question BankIBBhuvi Jain100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Comfrey Materia Medica HerbsДокумент17 страницComfrey Materia Medica HerbsAlejandra Guerrero100% (1)
- The Final Bible of Christian SatanismДокумент309 страницThe Final Bible of Christian SatanismLucifer White100% (1)
- Cum in Mouth ScriptsДокумент10 страницCum in Mouth Scriptsdeudaerlvincent72Оценок пока нет
- Ad1 MCQДокумент11 страницAd1 MCQYashwanth Srinivasa100% (1)
- Catia Composites Part Design PDFДокумент23 страницыCatia Composites Part Design PDFsarathsaravananОценок пока нет
- EIS Summary NotsДокумент62 страницыEIS Summary NotsKESHAV DroliaОценок пока нет
- Layos vs. VillanuevaДокумент2 страницыLayos vs. VillanuevaLaura MangantulaoОценок пока нет
- BhattacharyaДокумент10 страницBhattacharyavoraciousvОценок пока нет
- Iso 20816 8 2018 en PDFДокумент11 страницIso 20816 8 2018 en PDFEdwin Bermejo75% (4)
- Tool Room GrindingДокумент82 страницыTool Room GrindingsarathsaravananОценок пока нет
- Product Design Safety WarningДокумент1 страницаProduct Design Safety WarningsarathsaravananОценок пока нет
- MaterialДокумент109 страницMaterialsarathsaravananОценок пока нет
- Machine Design Lab ManualДокумент22 страницыMachine Design Lab Manualsarathsaravanan100% (4)
- Western SocityДокумент17 страницWestern SocitysarathsaravananОценок пока нет
- CATIAДокумент8 страницCATIAsarathsaravananОценок пока нет
- EdExcel A Level Chemistry Unit 5 Mark Scheme Jan 2000Документ3 страницыEdExcel A Level Chemistry Unit 5 Mark Scheme Jan 2000Nabeeha07Оценок пока нет
- Trigonometry Primer Problem Set Solns PDFДокумент80 страницTrigonometry Primer Problem Set Solns PDFderenz30Оценок пока нет
- Chapter 3 - the-WPS OfficeДокумент15 страницChapter 3 - the-WPS Officekyoshiro RyotaОценок пока нет
- MOA Agri BaseДокумент6 страницMOA Agri BaseRodj Eli Mikael Viernes-IncognitoОценок пока нет
- DBA Daily StatusДокумент9 страницDBA Daily StatuspankajОценок пока нет
- Digital Sytems Counters and Registers: Dce DceДокумент17 страницDigital Sytems Counters and Registers: Dce DcePhan Gia AnhОценок пока нет
- Gits Systems Anaphy DisordersДокумент23 страницыGits Systems Anaphy DisordersIlawОценок пока нет
- Echnical Ocational Ivelihood: Edia and Nformation IteracyДокумент12 страницEchnical Ocational Ivelihood: Edia and Nformation IteracyKrystelle Marie AnteroОценок пока нет
- Chapter 019Документ28 страницChapter 019Esteban Tabares GonzalezОценок пока нет
- Copper Reaction: Guillermo, Charles Hondonero, Christine Ilao, Ellaine Kim, Yumi Lambrinto, Arl JoshuaДокумент6 страницCopper Reaction: Guillermo, Charles Hondonero, Christine Ilao, Ellaine Kim, Yumi Lambrinto, Arl JoshuaCharles GuillermoОценок пока нет
- Sucesos de Las Islas Filipinas PPT Content - Carlos 1Документ2 страницыSucesos de Las Islas Filipinas PPT Content - Carlos 1A Mi YaОценок пока нет
- A Lei Do Sucesso Napoleon Hill Download 2024 Full ChapterДокумент23 страницыA Lei Do Sucesso Napoleon Hill Download 2024 Full Chapterdavid.brown752100% (12)
- Effect of Intensive Health Education On Adherence To Treatment in Sputum Positive Pulmonary Tuberculosis PatientsДокумент6 страницEffect of Intensive Health Education On Adherence To Treatment in Sputum Positive Pulmonary Tuberculosis PatientspocutindahОценок пока нет
- ReadingДокумент2 страницыReadingNhư ÝОценок пока нет
- Ar 2003Документ187 страницAr 2003Alberto ArrietaОценок пока нет
- Database Programming With SQL Section 2 QuizДокумент6 страницDatabase Programming With SQL Section 2 QuizJosé Obeniel LópezОценок пока нет
- Administrative LawДокумент7 страницAdministrative LawNyameka PekoОценок пока нет
- Simple Past TenselДокумент3 страницыSimple Past TenselPutra ViskellaОценок пока нет
- 201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFДокумент10 страниц201606300437271127888362list of Prescribed Textbooks ISC 2017 PDFShrimanta SatpatiОценок пока нет
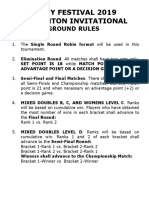
- Ground Rules 2019Документ3 страницыGround Rules 2019Jeremiah Miko LepasanaОценок пока нет
- Pilot SafetyДокумент120 страницPilot SafetyamilaОценок пока нет