Вам также может понравиться
- Libro Electrónica Sin BarrerasДокумент318 страницLibro Electrónica Sin BarrerasNatalia CastañedaОценок пока нет
- Diapositivas de AlgebraДокумент34 страницыDiapositivas de AlgebraRaul B. ReyesОценок пока нет
- Guía Rápida de DriveДокумент11 страницGuía Rápida de DriveRoger YvánОценок пока нет
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarДокумент12 страницDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Robot CiempiésДокумент2 страницыRobot CiempiésEdison Vinueza SalazarОценок пока нет
- Mosfets y ArduinoДокумент5 страницMosfets y Arduinopeto ricОценок пока нет
- Tesis Prototipo de Robot Móvil TeleoperadoДокумент107 страницTesis Prototipo de Robot Móvil TeleoperadoGerson DepablosОценок пока нет
- Diseño y Distribucion en PlantaДокумент12 страницDiseño y Distribucion en PlantaNicolasОценок пока нет
- Normas Tia Eia 568ay568bДокумент7 страницNormas Tia Eia 568ay568bPaul Guanochanga100% (1)
- Física. MecánicaДокумент18 страницFísica. MecánicaDIANA100% (1)
- Aplicaciones de ADC y DACДокумент12 страницAplicaciones de ADC y DACPePe Eduardo Mendoza Estrada43% (14)
- Aplicaciones de ADC y DACДокумент12 страницAplicaciones de ADC y DACPePe Eduardo Mendoza Estrada43% (14)
- AC3000-New Control Unit 09 08 SPДокумент17 страницAC3000-New Control Unit 09 08 SPBruno Mariano100% (1)
- Catalogo Compresores Libre de Aceite - PrecioДокумент60 страницCatalogo Compresores Libre de Aceite - PrecioJerson Galindo GarciaОценок пока нет
- Delantero Del Pantalón Masculino PASO 1Документ8 страницDelantero Del Pantalón Masculino PASO 1alexandra Frias RОценок пока нет
- Clase 1 TeleinformáticaДокумент48 страницClase 1 TeleinformáticaMaximiliano ViapianoОценок пока нет
- Análisis y Simulación de Sistema Discreto Con Matlab/SimulinkДокумент18 страницAnálisis y Simulación de Sistema Discreto Con Matlab/SimulinkVictor CondoriОценок пока нет
- 4 Análisis en El Dominio de La FrecuenciaДокумент27 страниц4 Análisis en El Dominio de La FrecuenciaHisauro Lerma MamaniОценок пока нет
- Notas de Clase - OptoelectronicaДокумент168 страницNotas de Clase - OptoelectronicaSonia DuqueОценок пока нет
- Arduino POVДокумент7 страницArduino POVjoseregistro100% (1)
- SCR y TriacДокумент17 страницSCR y TriacSandra Paulina Silva DelgadoОценок пока нет
- Guia Bimestral Circuitos Electricos - BДокумент4 страницыGuia Bimestral Circuitos Electricos - BIvan DiazОценок пока нет
- Formación de figuras con palitos de fósforoДокумент9 страницFormación de figuras con palitos de fósforoErika Inga CahuanaОценок пока нет
- Colonias InglesasДокумент39 страницColonias InglesasLeninFloranОценок пока нет
- Examen Robótica 2020Документ5 страницExamen Robótica 2020Vanessa Adriana SerranoОценок пока нет
- Matematica Discreta PDFДокумент9 страницMatematica Discreta PDFSweet MeryОценок пока нет
- SECCOMBLOGICДокумент44 страницыSECCOMBLOGICjuanchoОценок пока нет
- Examen Logica CombinacionalДокумент5 страницExamen Logica CombinacionalJulian NontoaОценок пока нет
- INTEGRALESДокумент8 страницINTEGRALESsantiagoОценок пока нет
- Tarea #1Документ8 страницTarea #1Edgar Geovany ZavalaОценок пока нет
- Procesamiento de Audio (Modulo 2) PDFДокумент44 страницыProcesamiento de Audio (Modulo 2) PDFAdrian Jose Costa OspinoОценок пока нет
- Diodo Zener: Características, Funcionamiento y EjemplosДокумент22 страницыDiodo Zener: Características, Funcionamiento y EjemplosJoel CruzОценок пока нет
- Puertas lógicas y circuitos integradosДокумент21 страницаPuertas lógicas y circuitos integradosErick ChávezОценок пока нет
- 2 Analisis de Senales en Tiempo Discreto y Sistemas Lineales PDFДокумент50 страниц2 Analisis de Senales en Tiempo Discreto y Sistemas Lineales PDFJohnny Juarez JuarezОценок пока нет
- Examen Logica CombinacionalДокумент7 страницExamen Logica CombinacionalAndrés Maldonado CastellanosОценок пока нет
- FETДокумент10 страницFETjose maizОценок пока нет
- Primer Examen-Sistemas DigitalesДокумент1 страницаPrimer Examen-Sistemas DigitalesCelesteCebedioОценок пока нет
- Problemario Cálculo Diferencial MultivariableДокумент116 страницProblemario Cálculo Diferencial MultivariablealejandroparrillaОценок пока нет
- Ética y Valores ProfesionalesДокумент49 страницÉtica y Valores ProfesionalesYoedely Sthefania TORRE ORDO�EZОценок пока нет
- Brazo Robot de 6 DOF Con Arduino + Tutorial +código + App - Talos ElectronicsДокумент53 страницыBrazo Robot de 6 DOF Con Arduino + Tutorial +código + App - Talos ElectronicsPJОценок пока нет
- Álgebra LinealДокумент8 страницÁlgebra LinealFabián AtilanoОценок пока нет
- Diodo ZenerДокумент6 страницDiodo ZenerErick MalagaОценок пока нет
- Modelo de Examen Precálculo ETSДокумент2 страницыModelo de Examen Precálculo ETSJorge GutiérrezОценок пока нет
- Funciones MatematicasДокумент19 страницFunciones MatematicasSara Elena Rodriguez Rodriguez100% (1)
- El TransistorДокумент16 страницEl TransistorAlicia ColemanОценок пока нет
- Trabajo y EnergíaДокумент43 страницыTrabajo y EnergíaRicardo Leon Posada100% (1)
- GPS Metodo de Triangulacion Solucion NumericaДокумент6 страницGPS Metodo de Triangulacion Solucion Numericainfantec12Оценок пока нет
- SCR Triac DiacДокумент25 страницSCR Triac DiacAlexander VelezОценок пока нет
- Fundamentos de Sistemas DigitalesДокумент21 страницаFundamentos de Sistemas DigitalessinnueОценок пока нет
- LOGARITMOSДокумент11 страницLOGARITMOSJessi Ramirez UОценок пока нет
- Efectores y PrecisionДокумент29 страницEfectores y PrecisionEli D'KidОценок пока нет
- Robótica Móvil PDFДокумент35 страницRobótica Móvil PDFDavid QuintoОценок пока нет
- Capitulo 9Документ27 страницCapitulo 9zakty_182Оценок пока нет
- Potencial ElectricoДокумент23 страницыPotencial ElectricoLorenita AguilarОценок пока нет
- Cifras Significativas y RedondeoДокумент10 страницCifras Significativas y RedondeoAnna G. GuerraОценок пока нет
- DIAC transistor diodo bidireccional características tipos aplicacionesДокумент13 страницDIAC transistor diodo bidireccional características tipos aplicacionesJesús MedinaОценок пока нет
- Display 7 SegmentosДокумент16 страницDisplay 7 SegmentosHenry Jose Izquierdo VillegasОценок пока нет
- Qué Es ProteusДокумент25 страницQué Es ProteusNeyser Chavez100% (1)
- Maquinas de EstadoДокумент18 страницMaquinas de EstadoHeber Plasencia SalazarОценок пока нет
- Funciones de Activación Satlin y SatlinsДокумент6 страницFunciones de Activación Satlin y Satlinscadni22Оценок пока нет
- Conversión Estrella Delta y Delta EstrellaДокумент24 страницыConversión Estrella Delta y Delta EstrellaalaynhfОценок пока нет
- 6.circuitos de Corriente Alterna - V2 PDFДокумент47 страниц6.circuitos de Corriente Alterna - V2 PDFluisaОценок пока нет
- Teorema de NyQuistДокумент3 страницыTeorema de NyQuistJar Dev Samuel0% (1)
- Diagnostico Circuitos ElectricosДокумент1 страницаDiagnostico Circuitos ElectricosleonelarcilaОценок пока нет
- Adquisición de Datos Con PythonДокумент2 страницыAdquisición de Datos Con PythonStuardo SagastumeОценок пока нет
- Diagram de Flujo MaquinadoДокумент2 страницыDiagram de Flujo MaquinadoJose Antonio Pujol VazquezОценок пока нет
- Diagram de Flujo MaquinadoДокумент2 страницыDiagram de Flujo MaquinadoJose Antonio Pujol VazquezОценок пока нет
- Robot esférico 3 grados libertadДокумент7 страницRobot esférico 3 grados libertadJose Antonio Pujol VazquezОценок пока нет
- Diagram de Flujo MaquinadoДокумент2 страницыDiagram de Flujo MaquinadoJose Antonio Pujol VazquezОценок пока нет
- AtmegasДокумент2 страницыAtmegasJose Antonio Pujol VazquezОценок пока нет
- Ingenieeia Asistida Por ComputadoraДокумент9 страницIngenieeia Asistida Por ComputadoraJose Antonio Pujol VazquezОценок пока нет
- Uracan MitchДокумент2 страницыUracan MitchRamos F AriОценок пока нет
- Estructura de un artículo científico: partes e información claveДокумент2 страницыEstructura de un artículo científico: partes e información claveLucas CarreñoОценок пока нет
- Estructura de un artículo científico: partes e información claveДокумент2 страницыEstructura de un artículo científico: partes e información claveLucas CarreñoОценок пока нет
- Trabajo 1 - Ingenieria EconomicaДокумент3 страницыTrabajo 1 - Ingenieria EconomicaRichard Lopez Marquez75% (4)
- Practicas en FluidsimДокумент11 страницPracticas en FluidsimJose Antonio Pujol VazquezОценок пока нет
- Formulario LaplaceДокумент2 страницыFormulario LaplaceEram Stefano Sandoval MendezОценок пока нет
- Formulario LaplaceДокумент2 страницыFormulario LaplaceEram Stefano Sandoval MendezОценок пока нет
- Guia 04 Modulo Operaciones de Almacenamiento 4Документ12 страницGuia 04 Modulo Operaciones de Almacenamiento 4Hugo GuerreroОценок пока нет
- Manual de UsuarioДокумент8 страницManual de UsuarioNohemy GodinezОценок пока нет
- Catalogo de Refacciones RT180Документ80 страницCatalogo de Refacciones RT180Miguel EstevaОценок пока нет
- Conceptos PHPДокумент7 страницConceptos PHPAnglyk AlonsoОценок пока нет
- Diapositivas SustentaciónДокумент6 страницDiapositivas Sustentaciónfabio Escandon PortillaОценок пока нет
- Grupo 5 LogisticaДокумент6 страницGrupo 5 LogisticaLeonardo SuárezОценок пока нет
- Plataformas de Trabajo ChimeneasДокумент15 страницPlataformas de Trabajo ChimeneasPoint GarciaОценок пока нет
- Verasys Final SpanishДокумент57 страницVerasys Final SpanishaugustoОценок пока нет
- Cotización Te 4-A22Документ4 страницыCotización Te 4-A22Carlos MejiaОценок пока нет
- IndicadoresLogroUDTopografiaДокумент2 страницыIndicadoresLogroUDTopografiaCAROL GABRIELA CUSIHUALLPA LOPEZОценок пока нет
- Diagnostico ExternoДокумент10 страницDiagnostico ExternoGiancarlo OnetoОценок пока нет
- Angeles SMA SDДокумент146 страницAngeles SMA SDVictor Felipe Domínguez MaloОценок пока нет
- Presentación Meceprim Catalogue - 1Документ15 страницPresentación Meceprim Catalogue - 1Jose Carlos ReinaОценок пока нет
- El Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)Документ23 страницыEl Rol de La Logistica en El Comercio Internacional:: Ing. Juan R. Opertti (MBA)SAMANTHA HERNANDEZ CAZADEROОценок пока нет
- Análisis estratégico de Colchones y Muebles Relax S.AДокумент37 страницAnálisis estratégico de Colchones y Muebles Relax S.AWENDY RAMIREZОценок пока нет
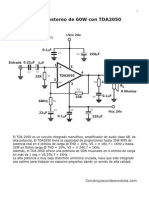
- Amplificador 60w Con Tda2050Документ8 страницAmplificador 60w Con Tda2050david100% (1)
- Untref - Desarrollador Web Front EndДокумент3 страницыUntref - Desarrollador Web Front EndFabianaОценок пока нет
- Preventivo-Sala PCMДокумент13 страницPreventivo-Sala PCMWilliam J. Roa CriolloОценок пока нет
- El Método Más Utilizado para Arrancar y Parar Un Motor EléctricoДокумент29 страницEl Método Más Utilizado para Arrancar y Parar Un Motor EléctricoDaniel FloresОценок пока нет
- Instalación de host virtual en GNS3Документ12 страницInstalación de host virtual en GNS3EddyMorОценок пока нет
- Ingeniera textil crea procesos sosteniblesДокумент2 страницыIngeniera textil crea procesos sosteniblesVeronica GomezОценок пока нет
- Informe AscensorДокумент9 страницInforme AscensorLuis Bazan100% (1)
- PDF Leccion 2 - CompressДокумент2 страницыPDF Leccion 2 - CompressCarlos LedesmaОценок пока нет
- Recursos Hidricos DocДокумент34 страницыRecursos Hidricos DocMaria Celina MoyanoОценок пока нет
- Armado de La Tapa de Cilindros (Cabezote)Документ22 страницыArmado de La Tapa de Cilindros (Cabezote)Alexis RomanОценок пока нет