Вам также может понравиться
- A Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsОт EverandA Short Guide to the Types and Details of Constructing a Suspension Bridge - Including Various Arrangements of Suspension Spans, Methods of Vertical Stiffening and Wire Cables Versus Eyebar ChainsОценок пока нет
- Question For IcДокумент4 страницыQuestion For IcPrem MОценок пока нет
- Belt, Rope and Chain Drives Denition: M Arshad Zahangir ChowdhuryДокумент12 страницBelt, Rope and Chain Drives Denition: M Arshad Zahangir ChowdhuryMelindaОценок пока нет
- Ece 301 - Electronics 1 June 2009Документ204 страницыEce 301 - Electronics 1 June 2009Jamael AbulaisОценок пока нет
- Design of Machine Elements Sample QuestionsДокумент9 страницDesign of Machine Elements Sample Questionsblogger100% (1)
- Mechanics of Materials 6th Edition Beer Solution Chapter 1Документ78 страницMechanics of Materials 6th Edition Beer Solution Chapter 1DanielMendozaNarvaezОценок пока нет
- QUIZ ASSIGNMENT NO. 2 Dynamic of Rigid Bodies Answer Key 1Документ26 страницQUIZ ASSIGNMENT NO. 2 Dynamic of Rigid Bodies Answer Key 1AicelleОценок пока нет
- Unit IV Kinematic Analysis of Mechanisms Analytical Method PDFДокумент43 страницыUnit IV Kinematic Analysis of Mechanisms Analytical Method PDFSAMRUDDHI SARDARОценок пока нет
- Machine Elements Quiz 1Документ17 страницMachine Elements Quiz 1Quen CuestaОценок пока нет
- DC Machine 2Документ20 страницDC Machine 2Fadhil A. HasanОценок пока нет
- DC Machines 1Документ49 страницDC Machines 1Michelle Flores100% (3)
- QUIZ ASSIGNMENT NO. 1 Dynamic of Rigid Bodies Answer KeyДокумент15 страницQUIZ ASSIGNMENT NO. 1 Dynamic of Rigid Bodies Answer KeyAicelleОценок пока нет
- Bab 6 - Exercise Chapter 6 TorsionДокумент2 страницыBab 6 - Exercise Chapter 6 TorsionAhmad Ridzuwan0% (1)
- Acceleration Analysis of MechanismsДокумент32 страницыAcceleration Analysis of MechanismsThahir Shah100% (1)
- Assignment #5Документ3 страницыAssignment #5Deniz GüneşОценок пока нет
- Unit-3.1.3-Gib and Cotter JointДокумент28 страницUnit-3.1.3-Gib and Cotter JointAsvath GuruОценок пока нет
- Instantaneous Center of Zero VelocityДокумент15 страницInstantaneous Center of Zero Velocitym_er100Оценок пока нет
- Chapter 4 - Kinematics of Mechanisms - 1Документ52 страницыChapter 4 - Kinematics of Mechanisms - 1ﺃﻧﺲﺻﺪﻳﻖОценок пока нет
- A1. Examples: Belt Drives Examples and WorksheetДокумент3 страницыA1. Examples: Belt Drives Examples and WorksheetAb_AlizadehОценок пока нет
- Ems TutorialДокумент43 страницыEms TutorialJohn Eric Balarao Ferranco33% (3)
- Tutorial Sheet No 1 On Spur GearДокумент3 страницыTutorial Sheet No 1 On Spur GearChirayuОценок пока нет
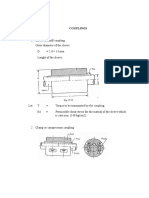
- CouplingsДокумент15 страницCouplingshudaperistesОценок пока нет
- Statics hw3Документ3 страницыStatics hw3nageshОценок пока нет
- Experiment 2Документ9 страницExperiment 2Narry StrummerОценок пока нет
- Introduction To Kinematics of Machines in MEДокумент3 страницыIntroduction To Kinematics of Machines in MEEmmanuelRomaresОценок пока нет
- Belt Drives ExamplesДокумент3 страницыBelt Drives ExamplesMuhd Afiq AzmirОценок пока нет
- Problem Set 8-Chapter 17 - Shafts-Selected ProblemsДокумент33 страницыProblem Set 8-Chapter 17 - Shafts-Selected Problemssainath_840% (1)
- Strength of Materials Compilation Team Malakas XD 1Документ43 страницыStrength of Materials Compilation Team Malakas XD 1Reiniel Cirujano AntonioОценок пока нет
- Design 2 1 PDFДокумент255 страницDesign 2 1 PDFAjayОценок пока нет
- Brayton CycleДокумент5 страницBrayton CycleDanang Wahdiat Aulia IshaqОценок пока нет
- PASSДокумент11 страницPASSMakobasaОценок пока нет
- CH-2-DC MachineДокумент83 страницыCH-2-DC MachineÙm ØrthøbøyОценок пока нет
- Mod-3. Spur GearДокумент18 страницMod-3. Spur GearSharthak GhoshОценок пока нет
- Instantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodДокумент61 страницаInstantaneous Centre Method-Velocity at A Point: An Alternative Approach To The Relative Velocity MethodKarthikeyanRamanujamОценок пока нет
- PlasticityДокумент30 страницPlasticityDaniОценок пока нет
- Chapter 1Документ15 страницChapter 1سعيد بن إدريس100% (1)
- MD ShaftДокумент18 страницMD Shaftiftikhar ahmedОценок пока нет
- Shafts and Shaft Components: Machine Design IIДокумент48 страницShafts and Shaft Components: Machine Design IIEngr Aleem AmjadОценок пока нет
- Module 1 Belt Drive 2018 PDFДокумент3 страницыModule 1 Belt Drive 2018 PDFKerr GenebraldoОценок пока нет
- Stepped PulleyДокумент4 страницыStepped PulleyKram YnarОценок пока нет
- Simple Stress and Strain Relationship: Stress and Strain in Two Dimensions, Principal Stresses, Stress Transformation, Mohr's CircleДокумент67 страницSimple Stress and Strain Relationship: Stress and Strain in Two Dimensions, Principal Stresses, Stress Transformation, Mohr's CircleMushini NagabhushanОценок пока нет
- DC GeneratorДокумент36 страницDC GeneratorJessica Laine TumbagaОценок пока нет
- Example 8.27Документ4 страницыExample 8.27Babasrinivas Guduru100% (1)
- University of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Документ4 страницыUniversity of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Vivin MathewОценок пока нет
- Torsion Sample Problem 2Документ9 страницTorsion Sample Problem 2Richiel Pasilan LañohanОценок пока нет
- 41 Rolling Contact BearingsДокумент11 страниц41 Rolling Contact BearingsPRASAD326100% (3)
- Design of Fasteners and Welded JointsДокумент8 страницDesign of Fasteners and Welded JointsRamanathan DuraiОценок пока нет
- Exer1322 PDFДокумент21 страницаExer1322 PDFNelva CSОценок пока нет
- Thin and Thick CylindersДокумент15 страницThin and Thick CylindersParveen Saini100% (1)
- Velocity AnalysisДокумент38 страницVelocity AnalysisChatur LingamОценок пока нет
- If You Need Some Practice On Problems Involving Angular MomentumДокумент3 страницыIf You Need Some Practice On Problems Involving Angular MomentumaizaОценок пока нет
- Chapter 6 Assig PDFДокумент15 страницChapter 6 Assig PDFAnas Asif100% (1)
- Experiment 2Документ2 страницыExperiment 2Anthony John Camacho ReburianoОценок пока нет
- 9 - Flanged Bolt CouplingДокумент15 страниц9 - Flanged Bolt CouplingPatrick Antonio Orge ChingОценок пока нет
- Chapter 1 Thermodynamics 2Документ2 страницыChapter 1 Thermodynamics 2afiqzeroОценок пока нет
- Chain Drives NotesДокумент7 страницChain Drives Notesjimmy mlelwaОценок пока нет
- 3 Chain Drives UploadДокумент9 страниц3 Chain Drives UploadDL ArtsОценок пока нет
- Chain DrivesДокумент13 страницChain DrivesnattydreadfathelahОценок пока нет
- Lecture - 25-26 - Chain DrivesДокумент20 страницLecture - 25-26 - Chain Drivesmdhillonhasnain1122Оценок пока нет
- Chains:: Advantages and Disadvantages of Chain Drive Over Belt or Rope DriveДокумент6 страницChains:: Advantages and Disadvantages of Chain Drive Over Belt or Rope DriveChetan KolambeОценок пока нет
- Im PDFДокумент4 страницыIm PDFCssОценок пока нет
- Self Inflating TiresДокумент4 страницыSelf Inflating TiresCssОценок пока нет
- Crompton Greaves Flameproof Motors CatalogueДокумент18 страницCrompton Greaves Flameproof Motors CatalogueSharan RautОценок пока нет
- Reduction of No in Diesel EngineДокумент43 страницыReduction of No in Diesel EngineDevesh RajputОценок пока нет
- Successive FinalДокумент1 страницаSuccessive FinalCssОценок пока нет
- ChaindriveДокумент34 страницыChaindriveCssОценок пока нет
- Savitribai Phule Pune University: Faculty of Science and TechnologyДокумент7 страницSavitribai Phule Pune University: Faculty of Science and TechnologyAnkitОценок пока нет
- Reduction of No in Diesel EngineДокумент43 страницыReduction of No in Diesel EngineDevesh RajputОценок пока нет
- A New Modern Belt Drive TransmissionДокумент19 страницA New Modern Belt Drive Transmissiontejas pawarОценок пока нет
- Cadenas-Technical Details PDFДокумент11 страницCadenas-Technical Details PDFBrayan QuinteroОценок пока нет
- IFIS - Intraoperative Floppy Iris Syndrome Wa Wa 27-09-2008Документ18 страницIFIS - Intraoperative Floppy Iris Syndrome Wa Wa 27-09-2008JanuszОценок пока нет
- Neuromuscular Diseases. ALSДокумент7 страницNeuromuscular Diseases. ALSjalan_zОценок пока нет
- Manual Generador CAT C15 IbaguéДокумент6 страницManual Generador CAT C15 IbaguéAndres VargasОценок пока нет
- Mechanics of MaterialsДокумент11 страницMechanics of MaterialsPeter MwangiОценок пока нет
- Ketu in 12th HousesДокумент10 страницKetu in 12th HousesSanket MishraОценок пока нет
- An Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainДокумент3 страницыAn Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainPkОценок пока нет
- Most Important One Liner Questions and Answers May 2022Документ15 страницMost Important One Liner Questions and Answers May 2022pradeepОценок пока нет
- Basic Principles of Remote SensingДокумент24 страницыBasic Principles of Remote Sensingfelipe4alfaro4salas100% (1)
- Genie Z45/22Документ58 страницGenie Z45/22jonny david martinez perezОценок пока нет
- TA308 616configurationДокумент1 страницаTA308 616configurationJesus AvilaОценок пока нет
- Streamline SWR (S) - Rev - 00-04-2019 PDFДокумент2 страницыStreamline SWR (S) - Rev - 00-04-2019 PDFarjun 11Оценок пока нет
- BHLP Year Long Plan Required English Medium 2023 24 Batch Final 991676721629413Документ3 страницыBHLP Year Long Plan Required English Medium 2023 24 Batch Final 991676721629413A V GamingОценок пока нет
- Infrastructure Definition:: Economic Infrastructure Includes BroadlyДокумент3 страницыInfrastructure Definition:: Economic Infrastructure Includes Broadlyabraha gebruОценок пока нет
- CFD - Basement Car ParkДокумент43 страницыCFD - Basement Car ParkTanveer HasanОценок пока нет
- BTL Info CNC ProgrammДокумент132 страницыBTL Info CNC ProgrammdieulafaitОценок пока нет
- Logistics Operation PlanningДокумент25 страницLogistics Operation PlanningLeonard AntoniusОценок пока нет
- Food - Forage - Potential - and - Carrying - Capacity - Rusa Kemampo - MedKonДокумент9 страницFood - Forage - Potential - and - Carrying - Capacity - Rusa Kemampo - MedKonRotten AnarchistОценок пока нет
- Movimiento Circular, Momentun Lineal y EnergíaДокумент92 страницыMovimiento Circular, Momentun Lineal y EnergíaJulio César Macías ZamoraОценок пока нет
- WRP Examination Extension 1 2012Документ12 страницWRP Examination Extension 1 2012Belinda JadeОценок пока нет
- Mid-Year Examination, 2023 Science Year 7 1 HourДокумент23 страницыMid-Year Examination, 2023 Science Year 7 1 HourAl-Hafiz Bin SajahanОценок пока нет
- Theology of Work and Practical ImplicationsДокумент28 страницTheology of Work and Practical ImplicationsVinicius CardosoОценок пока нет
- Eng Pipe DesignДокумент12 страницEng Pipe DesignEsapermana Riyan100% (1)
- Airbus A319-A320-A321 - Quick Reference HandbookДокумент113 страницAirbus A319-A320-A321 - Quick Reference Handbookrafaelldalpra100% (9)
- 100 Yer PM PPM 0605Документ40 страниц100 Yer PM PPM 0605biplabpal2009Оценок пока нет
- Under Pass Wing Wall (4.1m)Документ12 страницUnder Pass Wing Wall (4.1m)Naveed NazОценок пока нет
- Kiss Forex How To Trade Ichimoku PDFДокумент72 страницыKiss Forex How To Trade Ichimoku PDFSastryassociates Chartered100% (3)
- 1 28701-FGC+101+3441+Router+6471+Datasheet+Rev+FДокумент2 страницы1 28701-FGC+101+3441+Router+6471+Datasheet+Rev+FВладимир ЕгоровОценок пока нет
- Indigo Airlines - Final ReportДокумент22 страницыIndigo Airlines - Final Reportanand_lihinarОценок пока нет
- Column c4 From 3rd FloorДокумент1 страницаColumn c4 From 3rd Floor1man1bookОценок пока нет