Вам также может понравиться
- Directional DrillingДокумент43 страницыDirectional Drillingasif712Оценок пока нет
- Engineeringgraphics PDFДокумент607 страницEngineeringgraphics PDFSurulivelrajantОценок пока нет
- Text Book of Automobile Engineering PDFДокумент665 страницText Book of Automobile Engineering PDFDavid GaddalaОценок пока нет
- ProductBrochure A35F A40F EN 21A1006561 2010-12Документ24 страницыProductBrochure A35F A40F EN 21A1006561 2010-12Muhammad Ridha FatriantaОценок пока нет
- DD2711 1 10Документ10 страницDD2711 1 10paul heberth areche conovilcaОценок пока нет
- Chapter 2 Beams Curved in Plan FinalДокумент12 страницChapter 2 Beams Curved in Plan Finalyosef gemessa100% (1)
- DLC CoatingДокумент2 страницыDLC CoatingFernando Tapia GibsonОценок пока нет
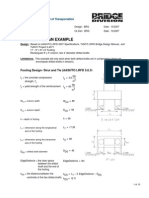
- Shaft Footing ExampleДокумент10 страницShaft Footing Exampleอภิรักษ์ มานะกิจศิริสุทธิОценок пока нет
- Foundation Designs.Документ26 страницFoundation Designs.Shijumon KpОценок пока нет
- Why Buildings Fall Down How Structures FailДокумент60 страницWhy Buildings Fall Down How Structures FaillyeshiunОценок пока нет
- LMTD CalculatorДокумент2 страницыLMTD CalculatorSATISH PAWARОценок пока нет
- Lec 1 Properties and Handling of Particulate SolidsДокумент95 страницLec 1 Properties and Handling of Particulate SolidsAli HasSsanОценок пока нет
- SME1307Документ114 страницSME1307Bakheit LayliОценок пока нет
- SMEA1601Документ91 страницаSMEA1601Aashrith VОценок пока нет
- Design Spur Gear Study Material LectДокумент6 страницDesign Spur Gear Study Material Lectprashant mishraОценок пока нет
- 02helical Gear Design FormulaeДокумент7 страниц02helical Gear Design FormulaeShubham BorseОценок пока нет
- Computer Aided Modeling Cost Estimation of A Hand TruckДокумент4 страницыComputer Aided Modeling Cost Estimation of A Hand TruckIJARP PublicationsОценок пока нет
- JESTEC Template (For Blind Review)Документ11 страницJESTEC Template (For Blind Review)Sholeh KhuddinОценок пока нет
- This Is The Template You Use To Format and Prepare Your ReportДокумент10 страницThis Is The Template You Use To Format and Prepare Your ReportrtffrttgОценок пока нет
- RCDC FE-Sample Problem 1-Flat SlabДокумент36 страницRCDC FE-Sample Problem 1-Flat SlabRoberto Pérez LeónОценок пока нет
- Detailed DesignДокумент39 страницDetailed Designchathura buddhikaОценок пока нет
- Design and Construction of A Connecting Rod PDFДокумент21 страницаDesign and Construction of A Connecting Rod PDFTeshome Dengiso0% (1)
- On Surface Approximation Using Developable SurfacesДокумент20 страницOn Surface Approximation Using Developable SurfacesFellipe Veríssimo SilvaОценок пока нет
- 9.traversing (Theodolite)Документ25 страниц9.traversing (Theodolite)Mercy SimangoОценок пока нет
- 2D Flow Over A Cylinder Simulation in ANSYSДокумент10 страниц2D Flow Over A Cylinder Simulation in ANSYSSarath Reddy YampatiОценок пока нет
- RCDC FE-Sample Problem 2-Flat PlateДокумент21 страницаRCDC FE-Sample Problem 2-Flat PlateRoberto Pérez LeónОценок пока нет
- Write Down The Following For Both The MaterialsДокумент6 страницWrite Down The Following For Both The MaterialsAlthaf ShaikОценок пока нет
- Bevel Gear Design ProcedureДокумент11 страницBevel Gear Design ProcedureSzymon RosikОценок пока нет
- Op-014. Procedure For Determination of Bending Moment: Work Instructions For EngineersДокумент10 страницOp-014. Procedure For Determination of Bending Moment: Work Instructions For Engineersjinwook75Оценок пока нет
- Ans 9 GeomДокумент6 страницAns 9 GeomAditiОценок пока нет
- Shaft AssignmentДокумент7 страницShaft AssignmentdongОценок пока нет
- Sin Fin CoronaДокумент1 страницаSin Fin CoronaJosé María MedianeroОценок пока нет
- Ac 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DДокумент13 страницAc 2008-1325: Interactive Involute Gear Analysis and Tooth Profile Generation Using Working Model 2DRobin MachargОценок пока нет
- Worm Gear Design ProcedureДокумент7 страницWorm Gear Design ProcedureSzymon RosikОценок пока нет
- Mhashilkar (2016) - Design and Analysis of EOT Crane HookДокумент6 страницMhashilkar (2016) - Design and Analysis of EOT Crane HookGogyОценок пока нет
- (Updated File) Job # 5. To Find The Area of Traverse by Triangulation MethodДокумент9 страниц(Updated File) Job # 5. To Find The Area of Traverse by Triangulation MethodUsama Bin YousufОценок пока нет
- Methodology: Soil Lateral LoadДокумент10 страницMethodology: Soil Lateral LoadAllyssa OpantoОценок пока нет
- COSC590B: Presentation On Computing The Convex Hull of (Piecewise) Curved Objects by Aurenhammer Et. AlДокумент43 страницыCOSC590B: Presentation On Computing The Convex Hull of (Piecewise) Curved Objects by Aurenhammer Et. AlDeepak KumarОценок пока нет
- ML Geometry 1-5 Segment and Angle BisectorsДокумент9 страницML Geometry 1-5 Segment and Angle Bisectorsmadhuraju778797Оценок пока нет
- Design and Analysis of An Aerial ScissorДокумент4 страницыDesign and Analysis of An Aerial ScissorBảo Toàn LêОценок пока нет
- ch09 3Документ155 страницch09 3abdallah ghannamОценок пока нет
- Formula Book For Structural Analysis-TC50312EДокумент43 страницыFormula Book For Structural Analysis-TC50312EAbhiraj PatilОценок пока нет
- Dynamics of Machine ManualДокумент16 страницDynamics of Machine ManualDevangMarvaniaОценок пока нет
- Assignment IДокумент3 страницыAssignment IS. Shreeman reddyОценок пока нет
- SatOrb ReportV1Документ13 страницSatOrb ReportV1João JúniorОценок пока нет
- C - Page24-52 METHODOLOGYДокумент30 страницC - Page24-52 METHODOLOGYAngelica MendozaОценок пока нет
- Chapter 3BДокумент21 страницаChapter 3BsunnyfokОценок пока нет
- Design and Analysis of Eot Crane Hook For Various Cross SectionsДокумент6 страницDesign and Analysis of Eot Crane Hook For Various Cross SectionsFiroz PawaskarОценок пока нет
- Involute Gear Gear NomenclatureДокумент9 страницInvolute Gear Gear NomenclatureGraham MutumaОценок пока нет
- Bevel and Worm Gear QB 2019Документ18 страницBevel and Worm Gear QB 2019Yogesh DanekarОценок пока нет
- The Orthogonal Decomposition Method in The Post-Processing of Redundant Machining OperationsДокумент4 страницыThe Orthogonal Decomposition Method in The Post-Processing of Redundant Machining OperationsRamu NelapatiОценок пока нет
- Bailey Rotor ModelДокумент32 страницыBailey Rotor Modelpurn prakashОценок пока нет
- Preliminary Design ReportДокумент16 страницPreliminary Design Reportapi-443631703Оценок пока нет
- Beton Prategang: Members Analysis Under FlexureДокумент47 страницBeton Prategang: Members Analysis Under Flexurezacoeb_a1669Оценок пока нет
- Helical Gear DesignДокумент4 страницыHelical Gear Designdhruv dabhiОценок пока нет
- Mechanical Desig and Machine Elements ME 322A Jing ZhengДокумент6 страницMechanical Desig and Machine Elements ME 322A Jing ZhengSergio Camacho SarmientoОценок пока нет
- Interpretation of CIU TestДокумент7 страницInterpretation of CIU TestAnonymous hhdd4mOmOhОценок пока нет
- CE211F-18 FW#2 Angular Measurement by Tape - 2CE-3Документ8 страницCE211F-18 FW#2 Angular Measurement by Tape - 2CE-3Bea BachillerОценок пока нет
- Grade 10 Investigation On Trigonometry 25 - 1Документ8 страницGrade 10 Investigation On Trigonometry 25 - 1faithОценок пока нет
- Basic Surveying 15Cv34Документ23 страницыBasic Surveying 15Cv34Ajeeth BОценок пока нет
- JESTEC Template (For Blind Review)Документ7 страницJESTEC Template (For Blind Review)ferdyanta_sitepuОценок пока нет
- Optimal Design of Circular Inductors: Goran Stojanovi C, Ljiljana Zivanov, and Mirjana Damnjanovi CДокумент14 страницOptimal Design of Circular Inductors: Goran Stojanovi C, Ljiljana Zivanov, and Mirjana Damnjanovi CpravinОценок пока нет
- Analysis of Slider Crank Mechanism Using Computer ProgrammingДокумент5 страницAnalysis of Slider Crank Mechanism Using Computer ProgrammingTablet MultilaserОценок пока нет
- 02 12 2014 Mechanical EngineeringДокумент30 страниц02 12 2014 Mechanical EngineeringSenthil MithulОценок пока нет
- Gate 2005Документ50 страницGate 2005api-26818774Оценок пока нет
- Me Year WisebnДокумент517 страницMe Year WisebnShashank PathakОценок пока нет
- Line Joining S (Yield Strength of The Material) On Mean Stress Axis andДокумент19 страницLine Joining S (Yield Strength of The Material) On Mean Stress Axis andgauravkumar bhandariОценок пока нет
- Theories of FailureДокумент14 страницTheories of FailureSurulivelrajantОценок пока нет
- Enggmech I Mech Unit 1 MCQДокумент14 страницEnggmech I Mech Unit 1 MCQSurulivelrajantОценок пока нет
- Engineering ThermodynamicsДокумент34 страницыEngineering ThermodynamicsSurulivelrajantОценок пока нет
- It Ass 5 2016evsДокумент8 страницIt Ass 5 2016evsSurulivelrajantОценок пока нет
- Prince Shri Venkateshwara Padmavathy Engineering College, Ponmar, Chennai - 127. Third Period Attendance Sheet (2020-2021 Even Semester)Документ6 страницPrince Shri Venkateshwara Padmavathy Engineering College, Ponmar, Chennai - 127. Third Period Attendance Sheet (2020-2021 Even Semester)SurulivelrajantОценок пока нет
- TablesДокумент1 страницаTablesSurulivelrajantОценок пока нет
- Unit 4CADMДокумент62 страницыUnit 4CADMSurulivelrajantОценок пока нет
- 1.1 Importance of Graphics in Engineering ApplicationsДокумент139 страниц1.1 Importance of Graphics in Engineering ApplicationsSurulivelrajantОценок пока нет
- Eg SyllabusДокумент2 страницыEg SyllabusSurulivelrajantОценок пока нет
- 08-05-2020cse A4 Assignment TPDEДокумент4 страницы08-05-2020cse A4 Assignment TPDESurulivelrajantОценок пока нет
- EquationsДокумент1 страницаEquationsSurulivelrajantОценок пока нет
- Eg QPДокумент5 страницEg QPSurulivelrajantОценок пока нет
- Prince Shri Venkateshwara Padmavathy Engineering College, Ponmar, Chennai-127 Assignment-IДокумент5 страницPrince Shri Venkateshwara Padmavathy Engineering College, Ponmar, Chennai-127 Assignment-ISurulivelrajantОценок пока нет
- Journal of Energy Storage: Aziz Babapoor, Gholamreza Karimi, Samad SabbaghiДокумент8 страницJournal of Energy Storage: Aziz Babapoor, Gholamreza Karimi, Samad SabbaghiSurulivelrajantОценок пока нет
- Renewable and Sustainable Energy ReviewsДокумент18 страницRenewable and Sustainable Energy ReviewsSurulivelrajantОценок пока нет
- CFD Studies On Different Configurations of Drying Chamber For Thin-Layer Drying of LeavesДокумент14 страницCFD Studies On Different Configurations of Drying Chamber For Thin-Layer Drying of LeavesSurulivelrajantОценок пока нет
- Performance Improvement of D-Sorbitol PCM Based Energy Storage System With Different FinsДокумент12 страницPerformance Improvement of D-Sorbitol PCM Based Energy Storage System With Different FinsSurulivelrajantОценок пока нет
- Accepted ManuscriptДокумент43 страницыAccepted ManuscriptSurulivelrajantОценок пока нет
- FRICTION Unit 5 PDFДокумент15 страницFRICTION Unit 5 PDFSurulivelrajantОценок пока нет
- Automobileengineering PDFДокумент161 страницаAutomobileengineering PDFSurulivelrajantОценок пока нет
- EN 3P LIQUID LEVEL CONTROL RELAY MANUAL English PDFДокумент5 страницEN 3P LIQUID LEVEL CONTROL RELAY MANUAL English PDFdio39saiОценок пока нет
- Sales Training Slides - NetSure 501 AC0 (Actura Flex 48420)Документ63 страницыSales Training Slides - NetSure 501 AC0 (Actura Flex 48420)chkimkimОценок пока нет
- Analysis of Harmonics Infiltration Produced by Electrification Railroad On 220kv and 35kv NetworkДокумент6 страницAnalysis of Harmonics Infiltration Produced by Electrification Railroad On 220kv and 35kv NetworkMenad SalahОценок пока нет
- VW Diesel GateДокумент10 страницVW Diesel GateMarius AndrieșОценок пока нет
- EHVT Unit 1Документ19 страницEHVT Unit 1SumanranuОценок пока нет
- Semiconductor TimesДокумент24 страницыSemiconductor Timessaj4uuОценок пока нет
- Tubing Thread Type, External Upset Tubing, Yaosheng Non Upset Tubing ManufacturerДокумент2 страницыTubing Thread Type, External Upset Tubing, Yaosheng Non Upset Tubing ManufacturerEDWIN M.PОценок пока нет
- Astm A 450Документ10 страницAstm A 450Telmo VianaОценок пока нет
- Rpa Chemical Recycling StatementДокумент5 страницRpa Chemical Recycling StatementPruthvi Mundalamane JagadishchandraОценок пока нет
- What Is The Principle Behind XRDДокумент4 страницыWhat Is The Principle Behind XRDCesar CRОценок пока нет
- Leroy SomerДокумент86 страницLeroy SomerSimón Klein100% (1)
- Activities On AC Motors in 2007Документ22 страницыActivities On AC Motors in 2007CarlosОценок пока нет
- Standard and Actual Vapor Compression CycleДокумент19 страницStandard and Actual Vapor Compression CycleJB LabraОценок пока нет
- Fans SoftДокумент291 страницаFans SoftAmitava PalОценок пока нет
- Parker Pneumatic Sensors PDFДокумент25 страницParker Pneumatic Sensors PDFyouri59490Оценок пока нет
- What Is The Process For Milk - PasteurizationДокумент7 страницWhat Is The Process For Milk - PasteurizationMichelle OrnerОценок пока нет
- Name Kausar HanifДокумент43 страницыName Kausar HanifIqra HanifОценок пока нет
- E1 2 Example String NotesДокумент1 страницаE1 2 Example String NotesSAEL SOLARОценок пока нет
- Area Handing OverДокумент6 страницArea Handing OveronspsnonsОценок пока нет
- In and Ex System DescДокумент5 страницIn and Ex System DescAli KuncoroОценок пока нет
- Congreso Ccps 2013Документ116 страницCongreso Ccps 2013gustav agudeloОценок пока нет
- Saudi Arabian Oil CompanyДокумент1 страницаSaudi Arabian Oil CompanyRiaz AhmadОценок пока нет
- Linear ProgramingДокумент5 страницLinear ProgramingSimon LiОценок пока нет
- Modeling of Power System in PSCAD/EMTDC ProgramДокумент22 страницыModeling of Power System in PSCAD/EMTDC ProgramboopelectraОценок пока нет