Вам также может понравиться
- EE465-Lecture 2Документ34 страницыEE465-Lecture 2hshjxcbzОценок пока нет
- Sensors CharacteristicsДокумент36 страницSensors Characteristicspotnuru JaivanthОценок пока нет
- EE465-Lecture 2Документ34 страницыEE465-Lecture 2Technical saadОценок пока нет
- Lecture 2Документ30 страницLecture 2Malik YousafОценок пока нет
- Emi Lecture 2 PDFДокумент27 страницEmi Lecture 2 PDFسید کاظمیОценок пока нет
- Mechatronics: Sensors Performance TerminologyДокумент23 страницыMechatronics: Sensors Performance TerminologyKARTHIK S SОценок пока нет
- Sensors and TransducersДокумент35 страницSensors and TransducersAniket100% (1)
- Instrumentation LaboratoryДокумент19 страницInstrumentation Laboratoryiky77Оценок пока нет
- Generalized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiДокумент20 страницGeneralized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiSaketh DahagamОценок пока нет
- 2-Static and Dynamic Characteristics of Zero and First Order instruments-18-Jul-2020Material - I - 18-Jul-2020 - Generalized - CharacteriДокумент23 страницы2-Static and Dynamic Characteristics of Zero and First Order instruments-18-Jul-2020Material - I - 18-Jul-2020 - Generalized - Characterisahale sheraОценок пока нет
- Sensors and Transducers: by H.D. Nelaka Shayamal PriyankaraДокумент14 страницSensors and Transducers: by H.D. Nelaka Shayamal PriyankaraPramuditha SuraweeraОценок пока нет
- Mecha U2Документ87 страницMecha U2lki06343Оценок пока нет
- Temp, Particles)Документ24 страницыTemp, Particles)Anitha AnuОценок пока нет
- Transeducer Lab Part 1Документ41 страницаTranseducer Lab Part 1Yasser IsteitiehОценок пока нет
- Arusha Technical College: Automation EET 06102 Introduction To Sensors Wilson, DДокумент73 страницыArusha Technical College: Automation EET 06102 Introduction To Sensors Wilson, DNurdin badiОценок пока нет
- Smartsensor 5Документ44 страницыSmartsensor 5Ravi KumarОценок пока нет
- Sensors and TransducersДокумент118 страницSensors and TransducersAhmad HamoudaОценок пока нет
- SensorДокумент100 страницSensorZaki nouiОценок пока нет
- Static Characteristics of InstrumentsДокумент17 страницStatic Characteristics of InstrumentsSarvesh100% (1)
- Chapter 2. Sensors and ActuatorsДокумент58 страницChapter 2. Sensors and ActuatorsTesfaye Olana100% (1)
- Chapter Two Static and Dynamic Characteristics of instruments@ASTUДокумент32 страницыChapter Two Static and Dynamic Characteristics of instruments@ASTUJibril JundiОценок пока нет
- Sensors and TransducersДокумент118 страницSensors and TransducersDhaval PatelОценок пока нет
- Sensors and Transducers: Dr. S.R.ChauhanДокумент91 страницаSensors and Transducers: Dr. S.R.ChauhanAman GargОценок пока нет
- Chapter 4Документ86 страницChapter 4TejkumarigurungОценок пока нет
- Lecture 8Документ107 страницLecture 8sampath bandaraОценок пока нет
- Transducers: Transducer ElementsДокумент14 страницTransducers: Transducer ElementsSourav SwastikОценок пока нет
- Oan551 Sensors & Transducers Unit 1 Introduction Part - B 1. Define The Static TermsДокумент10 страницOan551 Sensors & Transducers Unit 1 Introduction Part - B 1. Define The Static TermssenthilkumarОценок пока нет
- Sensors and TransducersДокумент79 страницSensors and TransducersMohdQasim0% (1)
- Chapter 4Документ31 страницаChapter 4Kibrom MenasboОценок пока нет
- Measurement IntroductionДокумент33 страницыMeasurement IntroductionManjula Udayanga HemapalaОценок пока нет
- Module1 Principles of MeasurementsДокумент32 страницыModule1 Principles of MeasurementskhushОценок пока нет
- PI2 MeasurementДокумент37 страницPI2 MeasurementRamkumar AОценок пока нет
- Introduction To Mechatronics: Transducer and SensorsДокумент32 страницыIntroduction To Mechatronics: Transducer and SensorsAmanuel tadiwosОценок пока нет
- Robotics Unit-5Документ64 страницыRobotics Unit-5S19IT1215 HarshithaОценок пока нет
- 1.intro To MeasurementsДокумент29 страниц1.intro To MeasurementsRaunaq SinghОценок пока нет
- MAE014 Computer and InstrumentsДокумент23 страницыMAE014 Computer and InstrumentsJuOliverosОценок пока нет
- Static Characteristics of Measurement Systems 25-8-2020Документ25 страницStatic Characteristics of Measurement Systems 25-8-2020Shraddha PaiОценок пока нет
- Chapter 2: Performance Characteristics of Instruments by Sintayehu ChallaДокумент34 страницыChapter 2: Performance Characteristics of Instruments by Sintayehu ChallasmithОценок пока нет
- Emi-Gvp CetДокумент37 страницEmi-Gvp CetVikas CollegeОценок пока нет
- Lecture 4 SlidesДокумент39 страницLecture 4 SlidesLogeeshan VelmanickamОценок пока нет
- Lec 6 - Variable Conversion Elements - 3Документ79 страницLec 6 - Variable Conversion Elements - 3Mani KhanОценок пока нет
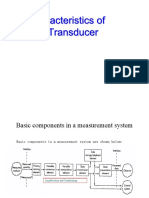
- Characteristic of TransducerДокумент40 страницCharacteristic of Transducergkarthikeyan50% (2)
- Unit 1 Concept of MeasurementДокумент93 страницыUnit 1 Concept of MeasurementBhuvanesh KumarОценок пока нет
- Chapter 4: Scaling: A. Definition of Key TermsДокумент8 страницChapter 4: Scaling: A. Definition of Key TermsKevin MuhalingОценок пока нет
- Sensor Dan Aktuator 2 PDFДокумент392 страницыSensor Dan Aktuator 2 PDFNugrahaОценок пока нет
- Unit - 1: Science of MeasurementДокумент29 страницUnit - 1: Science of MeasurementBlakheart TysonОценок пока нет
- Static Characteristics of MeasurementДокумент17 страницStatic Characteristics of MeasurementdanielbhaskerОценок пока нет
- Regenerative RepeaterДокумент5 страницRegenerative Repeaterparag_talesara33% (3)
- Unit-1 Mechanical MeasurementДокумент41 страницаUnit-1 Mechanical MeasurementNikunj YagnikОценок пока нет
- UNIT - 2 Sensors & TransducersДокумент84 страницыUNIT - 2 Sensors & TransducersishaanmittalcollegeОценок пока нет
- Unit 1 Introduction To Instrumentation-Part 2Документ34 страницыUnit 1 Introduction To Instrumentation-Part 2Akshat RawatОценок пока нет
- Emt 4103 Sensors and Transducers On 10th June Lesson 4Документ31 страницаEmt 4103 Sensors and Transducers On 10th June Lesson 4SEAN WALLACEОценок пока нет
- 1introduction To Amplitude Modulation (AM)Документ70 страниц1introduction To Amplitude Modulation (AM)Rennie KawanguОценок пока нет
- Static Characteristics of Measuring InstrumentsДокумент20 страницStatic Characteristics of Measuring InstrumentsAnurag Arya67% (3)
- Intrumentation - Introduction To Measurement SystemДокумент31 страницаIntrumentation - Introduction To Measurement Systemoladokunsulaiman100% (3)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10От EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Оценок пока нет
- PLC Laboratory Activity 2Документ3 страницыPLC Laboratory Activity 2Kate AlindajaoОценок пока нет
- Prelim Examination MaternalДокумент23 страницыPrelim Examination MaternalAaron ConstantinoОценок пока нет
- PM CH 14Документ24 страницыPM CH 14phani chowdaryОценок пока нет
- Decision Making and The Role of Manageme PDFДокумент20 страницDecision Making and The Role of Manageme PDFRaadmaan RadОценок пока нет
- Marketing FinalДокумент15 страницMarketing FinalveronicaОценок пока нет
- Application Activity Based Costing (Abc) System As An Alternative For Improving Accuracy of Production CostДокумент19 страницApplication Activity Based Costing (Abc) System As An Alternative For Improving Accuracy of Production CostM Agus SudrajatОценок пока нет
- Modulo EminicДокумент13 страницModulo EminicAndreaОценок пока нет
- WebLMT HelpДокумент12 страницWebLMT HelpJoão LopesОценок пока нет
- DarcДокумент9 страницDarcJunior BermudezОценок пока нет
- CAT 320D2: Hydraulic ExcavatorДокумент5 страницCAT 320D2: Hydraulic Excavatorhydeer 13Оценок пока нет
- Shostack ModSec08 Experiences Threat Modeling at MicrosoftДокумент11 страницShostack ModSec08 Experiences Threat Modeling at MicrosoftwolfenicОценок пока нет
- Nama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisДокумент2 страницыNama: Yossi Tiara Pratiwi Kelas: X Mis 1 Mata Pelajaran: Bahasa InggrisOrionj jrОценок пока нет
- History of The Sikhs by Major Henry Cour PDFДокумент338 страницHistory of The Sikhs by Major Henry Cour PDFDr. Kamalroop SinghОценок пока нет
- 2021-03 Trophy LagerДокумент11 страниц2021-03 Trophy LagerAderayo OnipedeОценок пока нет
- Anatomy Anal CanalДокумент14 страницAnatomy Anal CanalBela Ronaldoe100% (1)
- 2009 2011 DS Manual - Club Car (001-061)Документ61 страница2009 2011 DS Manual - Club Car (001-061)misaОценок пока нет
- Chemistry Form 4 Daily Lesson Plan - CompressДокумент3 страницыChemistry Form 4 Daily Lesson Plan - Compressadila ramlonОценок пока нет
- II 2022 06 Baena-Rojas CanoДокумент11 страницII 2022 06 Baena-Rojas CanoSebastian GaonaОценок пока нет
- Heterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Документ5 страницHeterogeneity in Macroeconomics: Macroeconomic Theory II (ECO-504) - Spring 2018Gabriel RoblesОценок пока нет
- Residual Power Series Method For Obstacle Boundary Value ProblemsДокумент5 страницResidual Power Series Method For Obstacle Boundary Value ProblemsSayiqa JabeenОценок пока нет
- Strucure Design and Multi - Objective Optimization of A Novel NPR Bumber SystemДокумент19 страницStrucure Design and Multi - Objective Optimization of A Novel NPR Bumber System施元Оценок пока нет
- Dtu Placement BrouchureДокумент25 страницDtu Placement BrouchureAbhishek KumarОценок пока нет
- Howard R700X - SPL - INTДокумент44 страницыHoward R700X - SPL - INTJozsefОценок пока нет
- 11-03 TB Value Chains and BPs - WolfДокумент3 страницы11-03 TB Value Chains and BPs - WolfPrakash PandeyОценок пока нет
- Thermally Curable Polystyrene Via Click ChemistryДокумент4 страницыThermally Curable Polystyrene Via Click ChemistryDanesh AzОценок пока нет
- The Mantel Colonized Nation Somalia 10 PDFДокумент5 страницThe Mantel Colonized Nation Somalia 10 PDFAhmad AbrahamОценок пока нет
- OZO Player SDK User Guide 1.2.1Документ16 страницOZO Player SDK User Guide 1.2.1aryan9411Оценок пока нет
- Stress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingДокумент9 страницStress-Strain Modelfor Grade275 Reinforcingsteel With Cyclic LoadingRory Cristian Cordero RojoОценок пока нет
- CT SizingДокумент62 страницыCT SizingMohamed TalebОценок пока нет
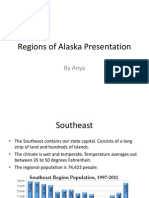
- Regions of Alaska PresentationДокумент15 страницRegions of Alaska Presentationapi-260890532Оценок пока нет