Вам также может понравиться
- 16 PDFДокумент129 страниц16 PDFgОценок пока нет
- Dynamics - Chapter - 2 - Kinematics - of - Particles Rectilinear Motion To Normal Tangential Coordinates PDFДокумент56 страницDynamics - Chapter - 2 - Kinematics - of - Particles Rectilinear Motion To Normal Tangential Coordinates PDFJP NielesОценок пока нет
- Linear Momentum Questions With SolutionsДокумент13 страницLinear Momentum Questions With SolutionsAlbert Jn BaptisteОценок пока нет
- Halliday and Resnick Ch05Документ51 страницаHalliday and Resnick Ch05Kalen Gonzales100% (1)
- Vectors Scalars PPTДокумент14 страницVectors Scalars PPTDaniel LeeОценок пока нет
- Physics - DDPS1713 - Chapter 4-Work, Energy, Momentum and PowerДокумент26 страницPhysics - DDPS1713 - Chapter 4-Work, Energy, Momentum and Powerjimmi_ramliОценок пока нет
- SUMA204Документ540 страницSUMA204joyОценок пока нет
- Relative VelocityДокумент3 страницыRelative VelocityKanakSinghalОценок пока нет
- Module 2 - Equilibrium of Rigid BodiesДокумент21 страницаModule 2 - Equilibrium of Rigid BodiesJoyce AsisОценок пока нет
- Ch04 Homework SolutionsДокумент88 страницCh04 Homework SolutionsOsama Maher100% (1)
- CH 6 Momentum: Relationship Between Momentum & ForceДокумент2 страницыCH 6 Momentum: Relationship Between Momentum & ForceSyed Mairaj Ul HaqОценок пока нет
- Heat Transfer Final Exam Problem & SolutionsДокумент8 страницHeat Transfer Final Exam Problem & SolutionsRonard Pa–a0% (1)
- Viscosity of LiquidДокумент8 страницViscosity of LiquidputriОценок пока нет
- Statics of Rigid BodiesДокумент43 страницыStatics of Rigid BodiesJC CABESOОценок пока нет
- Chapter 7 - Finite Element Method For Solid Mechanics (2016!09!14)Документ17 страницChapter 7 - Finite Element Method For Solid Mechanics (2016!09!14)RickОценок пока нет
- Hooke LawДокумент3 страницыHooke LawLiuJiewChuanОценок пока нет
- ASSIGNMENT 1: Thermo Dunamics - 1: NAME:Osama Ahmed REG NO:me-191086Документ2 страницыASSIGNMENT 1: Thermo Dunamics - 1: NAME:Osama Ahmed REG NO:me-191086Osama Ahmed OfficialОценок пока нет
- Physics I: Tipler - Chapter 2Документ31 страницаPhysics I: Tipler - Chapter 2sweetandwildОценок пока нет
- Chapter 74 Volumes of Solids of Revolution: EXERCISE 288 Page 783Документ12 страницChapter 74 Volumes of Solids of Revolution: EXERCISE 288 Page 783chandima100% (1)
- Rectilinear Kinematics (Continuous Motion)Документ12 страницRectilinear Kinematics (Continuous Motion)Nik RuqiyahОценок пока нет
- DC Circuits: Prepared byДокумент12 страницDC Circuits: Prepared byRuth DVОценок пока нет
- MCQ Engineering Mechanics Part VДокумент17 страницMCQ Engineering Mechanics Part VDominic LanticseОценок пока нет
- Constant Acceleration Practice ProblemsДокумент4 страницыConstant Acceleration Practice ProblemsDeema AljaririОценок пока нет
- Homework 1 SolutionsДокумент20 страницHomework 1 Solutionsjohn0% (1)
- Del Mundo, Bryan - Chap3Документ73 страницыDel Mundo, Bryan - Chap3Bryan Del MundoОценок пока нет
- MENG - 331 - Spring 2019-2020 - TUTORIAL PROBLEMSДокумент66 страницMENG - 331 - Spring 2019-2020 - TUTORIAL PROBLEMSİREM Taşlı100% (1)
- Applications of Dynamics in Automotive EngineeringДокумент10 страницApplications of Dynamics in Automotive EngineeringUmar Ayaz0% (1)
- Practice Assignment Work Energy and PowerДокумент3 страницыPractice Assignment Work Energy and PowerAyush GogiaОценок пока нет
- Claude Liquefaction Process Claude Liquefaction Process: EquationsДокумент2 страницыClaude Liquefaction Process Claude Liquefaction Process: Equationsjaja59Оценок пока нет
- Mechanical Vibration - MSD - Part 2Документ9 страницMechanical Vibration - MSD - Part 2Mohammad Saad SalimОценок пока нет
- FE Statics PDFДокумент6 страницFE Statics PDFMiguel Analuisa0% (1)
- 18 Vector Word Problem Review PDFДокумент6 страниц18 Vector Word Problem Review PDFwade aryanОценок пока нет
- Basics and Statics of Particles - Unit I - GE6253Документ57 страницBasics and Statics of Particles - Unit I - GE6253stkrОценок пока нет
- Gas Dynamics and Jet Propulsion 2 Marks All 5 UnitsДокумент22 страницыGas Dynamics and Jet Propulsion 2 Marks All 5 UnitsDinesh KumarОценок пока нет
- Angular Momentum MC Questions PDFДокумент8 страницAngular Momentum MC Questions PDFLynn Hollenbeck BreindelОценок пока нет
- Dimensional Analysis and ErrorsДокумент17 страницDimensional Analysis and ErrorsLastschoolkingZОценок пока нет
- Vector AlgebraДокумент14 страницVector AlgebraShang Divina EbradaОценок пока нет
- ECE-227 Lab Manual 08192013Документ69 страницECE-227 Lab Manual 08192013Evan EnderleОценок пока нет
- Work Power and EnergyДокумент9 страницWork Power and Energyhimadri.banerji60Оценок пока нет
- 2 Velocity and AccelerationДокумент28 страниц2 Velocity and AccelerationAbdur RahmanОценок пока нет
- Contoh SoalДокумент24 страницыContoh SoalNovia RezaОценок пока нет
- 11 Lecture PPT Rectilinear MotionДокумент42 страницы11 Lecture PPT Rectilinear MotionSim Je Han67% (3)
- Normal and Tangential ComponentsДокумент19 страницNormal and Tangential ComponentsGarrey BrionesОценок пока нет
- Kinetic Friction: Experiment #13Документ8 страницKinetic Friction: Experiment #13kate anne del castroОценок пока нет
- Acceleration Analysis of MechanismsДокумент32 страницыAcceleration Analysis of MechanismsThahir Shah100% (1)
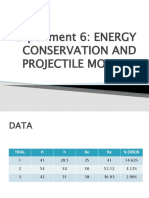
- Experiment 6: ENERGY Conservation and Projectile Motion: Group 4Документ10 страницExperiment 6: ENERGY Conservation and Projectile Motion: Group 4ParZiValОценок пока нет
- Activity 1 - IndividualДокумент9 страницActivity 1 - IndividualDarlene FernandezОценок пока нет
- Non Homogenous Differential EquationДокумент11 страницNon Homogenous Differential EquationMariel Cariño AlfiscarОценок пока нет
- ES 15 Module 5 V2.0 PDFДокумент47 страницES 15 Module 5 V2.0 PDFWarren TigbabaoОценок пока нет
- Chapter 6Документ21 страницаChapter 6Shida ShidotОценок пока нет
- Chapter 15 - Oscillations - Solutions PDFДокумент9 страницChapter 15 - Oscillations - Solutions PDFrobin bhalroyОценок пока нет
- UNIFORM CIRCULAR MOTION - Notes PDFДокумент5 страницUNIFORM CIRCULAR MOTION - Notes PDFJohnston ThevarajahОценок пока нет
- Chapter 01Документ15 страницChapter 01tmya06Оценок пока нет
- Problem Set 3.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdДокумент18 страницProblem Set 3.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed王重貿Оценок пока нет
- Introduction To MechanicsДокумент16 страницIntroduction To MechanicsbijoyОценок пока нет
- Pressure Measurement by Manometer - 2Документ6 страницPressure Measurement by Manometer - 2Alexander Mugabe100% (1)
- Dynamics Chapter 7Документ118 страницDynamics Chapter 7Hisyammudin RoslanОценок пока нет
- Topik 10: Dinamika Benda Kaku Gaya Dan PercepatanДокумент5 страницTopik 10: Dinamika Benda Kaku Gaya Dan PercepatanDhedhe PrasetyaОценок пока нет
- Dynamic Analysis of LinkagesДокумент9 страницDynamic Analysis of LinkagesHimmatSinghОценок пока нет
- An Overview On Economic Machining of Hardened Steels by Hard Turning and Its Process VariablesДокумент9 страницAn Overview On Economic Machining of Hardened Steels by Hard Turning and Its Process VariablesMike RodeloОценок пока нет
- On The Performance Indexes For Robot Manipulators PDFДокумент9 страницOn The Performance Indexes For Robot Manipulators PDFMike RodeloОценок пока нет
- CH 01Документ24 страницыCH 01Mike RodeloОценок пока нет
- On The Performance Indexes For Robot ManipulatorsДокумент9 страницOn The Performance Indexes For Robot ManipulatorsMike RodeloОценок пока нет
- CH 17 PDFДокумент144 страницыCH 17 PDFMike Rodelo100% (1)
- (Springer Tracts in Advanced Robotics 96) Gianluca Antonelli (Auth.) - Underwater Robots-Springer International Publishing (2014)Документ1 страница(Springer Tracts in Advanced Robotics 96) Gianluca Antonelli (Auth.) - Underwater Robots-Springer International Publishing (2014)Mike RodeloОценок пока нет
- Application of Thermoeconomics To Industrial EcologyДокумент22 страницыApplication of Thermoeconomics To Industrial EcologyMike RodeloОценок пока нет
- Phrasal Verbs-Syntactic BehaviorДокумент4 страницыPhrasal Verbs-Syntactic BehaviorAntonija KnezovićОценок пока нет
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Документ28 страницCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaОценок пока нет
- Avh-X8550bt Operating Manual Eng-Esp-PorДокумент7 страницAvh-X8550bt Operating Manual Eng-Esp-PorRannie IsonОценок пока нет
- GTP For 1CX300sqmmДокумент4 страницыGTP For 1CX300sqmmpriyanka236Оценок пока нет
- 19 04 20 p2 PDFДокумент32 страницы19 04 20 p2 PDFGovind SajuОценок пока нет
- Technical Description: T610 Radio On The Tranceiver Board: ContentsДокумент16 страницTechnical Description: T610 Radio On The Tranceiver Board: ContentsHeru AndikaОценок пока нет
- MathДокумент4 страницыMathHermann Dejero LozanoОценок пока нет
- ECE ExperimentДокумент13 страницECE Experimentasm98090% (1)
- (Frankel 1962) The Production Function in Allocation and GrowthДокумент29 страниц(Frankel 1962) The Production Function in Allocation and GrowthT-roy Taylor100% (1)
- 16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLДокумент64 страницы16 - Bit RISC Processor Design For Convolution Application Using Verilog HDLchandra sekhar100% (1)
- Newvhdl Syllabus (It&Cse)Документ2 страницыNewvhdl Syllabus (It&Cse)Mude Kishore NaikОценок пока нет
- Circuit Protective Devices: Learner Work BookДокумент41 страницаCircuit Protective Devices: Learner Work BookChanel Maglinao80% (5)
- FP 3000 PDFДокумент1 страницаFP 3000 PDFClaudio Godoy ZepedaОценок пока нет
- Honda IDSI SM - 5 PDFДокумент14 страницHonda IDSI SM - 5 PDFauto projectОценок пока нет
- ElectrolysisДокумент3 страницыElectrolysisRaymond ChanОценок пока нет
- Pearson Product-Moment Correlation Coefficient Table of Critical ValuesДокумент2 страницыPearson Product-Moment Correlation Coefficient Table of Critical ValuesOdy AjjaОценок пока нет
- Introduction To PIC and Embedded SystemsДокумент12 страницIntroduction To PIC and Embedded Systemsheno ahОценок пока нет
- 1982 International Rectifier Hexfet Databook PDFДокумент472 страницы1982 International Rectifier Hexfet Databook PDFetmatsudaОценок пока нет
- Full U-Band Rectangular Waveguide-to-Microstrip Transition Using E-Plane ProbeДокумент4 страницыFull U-Band Rectangular Waveguide-to-Microstrip Transition Using E-Plane ProbeSanjib MandalОценок пока нет
- App NandДокумент30 страницApp NandRajesh MedampudiОценок пока нет
- 20CB PDFДокумент59 страниц20CB PDFChidiebere Samuel OkogwuОценок пока нет
- Afroasiatic LanguagesДокумент13 страницAfroasiatic Languagesaskask2Оценок пока нет
- Unit 6 - EarthingДокумент26 страницUnit 6 - Earthinggautam100% (1)
- A Practical Total Synthesis of CocaineДокумент13 страницA Practical Total Synthesis of CocaineRodrigo Fernanda100% (4)
- 新型重油催化裂化催化剂RCC 1的研究开发Документ5 страниц新型重油催化裂化催化剂RCC 1的研究开发Anca DumitruОценок пока нет
- Soiling Rates of PV Modules vs. Thermopile PyranometersДокумент3 страницыSoiling Rates of PV Modules vs. Thermopile PyranometersAbdul Mohid SheikhОценок пока нет
- All Graphs and Charts Available in Show MeДокумент16 страницAll Graphs and Charts Available in Show MeGANGA TAGRAОценок пока нет
- Practical - Magnetic - Design (Fill Factor) PDFДокумент20 страницPractical - Magnetic - Design (Fill Factor) PDFAhtasham ChaudhryОценок пока нет
- Petrom OMV Norm DEF 2001 Rom Eng Rev.2 2009-06-01Документ61 страницаPetrom OMV Norm DEF 2001 Rom Eng Rev.2 2009-06-01luciandu100% (1)
- TM1 Rules White Paper Best Practice RulesДокумент22 страницыTM1 Rules White Paper Best Practice RulesMax ChenОценок пока нет