Вам также может понравиться
- Chapter 2Документ27 страницChapter 2AhmadJaffarGulfarazОценок пока нет
- Laplace Transform Solves Differential EquationsДокумент27 страницLaplace Transform Solves Differential EquationsFarooq AhmadОценок пока нет
- Lecture 3Документ18 страницLecture 3Preeti KumariОценок пока нет
- Review of Laplace Transform and Its Applications in Mechanical Engineering AnalysisДокумент39 страницReview of Laplace Transform and Its Applications in Mechanical Engineering AnalysisMathematics PointОценок пока нет
- 03 Control de Procesos 21-22 v1Документ33 страницы03 Control de Procesos 21-22 v1Itziar ArenasОценок пока нет
- Regulation and Control: by Tewedage SileshiДокумент29 страницRegulation and Control: by Tewedage SileshiSiraye AbirhamОценок пока нет
- Lesson #2 Lecture #1 Review of Laplace TransformДокумент16 страницLesson #2 Lecture #1 Review of Laplace TransformShazidОценок пока нет
- Process Conrol 2Документ130 страницProcess Conrol 2SonuОценок пока нет
- Stepper Motor Open-Loop Control System Modeling AnДокумент13 страницStepper Motor Open-Loop Control System Modeling An47DEESUBRATA KAYALОценок пока нет
- Laplace Transform Simplifies Process Control Differential EquationsДокумент8 страницLaplace Transform Simplifies Process Control Differential EquationsRevo RevoyevОценок пока нет
- Ee202laplacetransform PDFДокумент85 страницEe202laplacetransform PDFFairusabdrОценок пока нет
- 3 Transfer Function PDFДокумент4 страницы3 Transfer Function PDFisteboiОценок пока нет
- Laplace Transform: Definitions, Transfer FunctionsДокумент58 страницLaplace Transform: Definitions, Transfer FunctionsheroОценок пока нет
- IE474 Summer2022 Nise Ch2 PartA PDFДокумент33 страницыIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoОценок пока нет
- Module-3 Laplace and Inverse Laplace Transforms PDFДокумент45 страницModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarОценок пока нет
- Control 4 DR - GhanemДокумент131 страницаControl 4 DR - Ghanemabdulqadir100% (1)
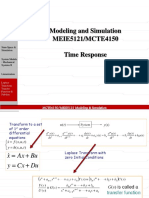
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseДокумент31 страницаModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaОценок пока нет
- 002 ME31002 - Transfer Function-2020decДокумент28 страниц002 ME31002 - Transfer Function-2020decShek Yu LaiОценок пока нет
- LaplaceTransform 1Документ227 страницLaplaceTransform 1Komborerai MuvhiringiОценок пока нет
- Process Control 7Документ45 страницProcess Control 7ali AbbasОценок пока нет
- Mini Project: Shah & Anchor Kutchhi Engineering CollegeДокумент5 страницMini Project: Shah & Anchor Kutchhi Engineering CollegeAinul AlamОценок пока нет
- The Laplace TransformsДокумент61 страницаThe Laplace TransformsLouie Shaolin Lungao100% (1)
- Ch2 Modeling in Frequency DomainДокумент66 страницCh2 Modeling in Frequency DomainWei-Hsin CheinОценок пока нет
- Mini Project: Shah & Anchor Kutchhi Engineering CollegeДокумент7 страницMini Project: Shah & Anchor Kutchhi Engineering CollegeAinul AlamОценок пока нет
- CHE 3002-PROCESS INSTRUMENTATION AND CONTROL LECTURE NOTESДокумент16 страницCHE 3002-PROCESS INSTRUMENTATION AND CONTROL LECTURE NOTESSATHIYANARAYANAN D 15BCM0007Оценок пока нет
- LaplaceДокумент173 страницыLaplaceOscar Brian OscarOОценок пока нет
- Unit-I 23 - 12 - 14Документ157 страницUnit-I 23 - 12 - 14Anonymous JDXbBDBОценок пока нет
- Signals and Systems With Matlab (Steven T. Karris)Документ36 страницSignals and Systems With Matlab (Steven T. Karris)Andre RodriguesОценок пока нет
- ME451 Control Systems Course RoadmapДокумент4 страницыME451 Control Systems Course RoadmapMarju LasluisaОценок пока нет
- (9-11) Introduction To Laplace TransformДокумент3 страницы(9-11) Introduction To Laplace Transformpratiksha nagdawneОценок пока нет
- A Brief Review of Laplace TransformsДокумент10 страницA Brief Review of Laplace TransformsSupriya AnandОценок пока нет
- EE3331C Feedback Control Systems L3: Review of Laplace Transform & Transfer FunctionsДокумент40 страницEE3331C Feedback Control Systems L3: Review of Laplace Transform & Transfer Functionspremsanjith subramaniОценок пока нет
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleДокумент18 страницMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(Оценок пока нет
- Laplace transformДокумент71 страницаLaplace transformsshams5573Оценок пока нет
- Analysis and Applications of Laplace/Fourier Transformations in Electric CircuitДокумент8 страницAnalysis and Applications of Laplace/Fourier Transformations in Electric Circuitastro trumpОценок пока нет
- Mathematical Models of Control SystemsДокумент44 страницыMathematical Models of Control SystemsQuốc KhánhОценок пока нет
- S Announcement 3133Документ60 страницS Announcement 3133Zetsu BlackОценок пока нет
- Laplace and Fourier Transform Analysis of Electric CircuitsДокумент7 страницLaplace and Fourier Transform Analysis of Electric CircuitsSwasti RanjanОценок пока нет
- LAPLACE TRANSFORM TITLEДокумент23 страницыLAPLACE TRANSFORM TITLEGirmayОценок пока нет
- Process Control Transfer FunctionsДокумент16 страницProcess Control Transfer FunctionsAnonymous 0zrCNQОценок пока нет
- MAT231BT - Laplace TransformsДокумент25 страницMAT231BT - Laplace TransformsRochakОценок пока нет
- Lect9-Laplace Dan AplikasiДокумент105 страницLect9-Laplace Dan AplikasiRahmi SihombingОценок пока нет
- Week 2 - L2 - Review of Laplace TransformДокумент39 страницWeek 2 - L2 - Review of Laplace TransformOlerile AnaniaОценок пока нет
- Laplace HadyДокумент50 страницLaplace HadyIhwan FauziОценок пока нет
- Laplace Transform-Introduction and DefnitionsДокумент71 страницаLaplace Transform-Introduction and DefnitionsSri Peni WijayantiОценок пока нет
- ME451 Control Systems Course RoadmapДокумент6 страницME451 Control Systems Course RoadmapVu NghiaОценок пока нет
- Laplace Transform (Slides)Документ31 страницаLaplace Transform (Slides)Riccardo Tc BertolloОценок пока нет
- Bab 2 Transformasi LaplaceДокумент31 страницаBab 2 Transformasi LaplaceRizqi Cahyo M PutraОценок пока нет
- System Modeling Transfer FunctionДокумент16 страницSystem Modeling Transfer Functionيوسف الأحمديОценок пока нет
- System Modeling Transfer FunctionДокумент16 страницSystem Modeling Transfer Functionيوسف الأحمديОценок пока нет
- ME451: Control Systems Course RoadmapДокумент4 страницыME451: Control Systems Course RoadmapVu NghiaОценок пока нет
- ME451: Control Systems Course RoadmapДокумент4 страницыME451: Control Systems Course RoadmapVu NghiaОценок пока нет
- A Study On The Inrush Current Phenomena in Transformer SubstationsДокумент8 страницA Study On The Inrush Current Phenomena in Transformer SubstationsCornel ArageaОценок пока нет
- A Study On The Inrush Current Phenomena in Transformer SubstationsДокумент9 страницA Study On The Inrush Current Phenomena in Transformer SubstationsFirdaus AzmiОценок пока нет
- Model Matematis Sistem Fisik (Materi 2)Документ47 страницModel Matematis Sistem Fisik (Materi 2)Refly DariseОценок пока нет
- Lab 03:to Investigate The Control of Various Mechanical and Electrical System Using Matlab®Документ8 страницLab 03:to Investigate The Control of Various Mechanical and Electrical System Using Matlab®Syed Saqib BukhariОценок пока нет
- Introduction To The Laplace Transform: (Chapter 12)Документ79 страницIntroduction To The Laplace Transform: (Chapter 12)Trần VũОценок пока нет
- Definition of The Laplac...Документ2 страницыDefinition of The Laplac...Raymon Devinser SiahaanОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент2 страницыCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Course Syllabi ABET New PlanДокумент60 страницCourse Syllabi ABET New PlanFarooq AhmadОценок пока нет
- Biology Past PaperДокумент195 страницBiology Past PaperFarooq Ahmad100% (1)
- 0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesДокумент2 страницы0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- 2020 Specimen Paper 1 PDFДокумент16 страниц2020 Specimen Paper 1 PDFThapelo JeremiahОценок пока нет
- 0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesДокумент2 страницы0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- 0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesДокумент2 страницы0610 BIOLOGY: MARK SCHEME For The October/November 2015 SeriesFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент20 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент20 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент16 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- November 2017 (v1) MS - Paper 1 CIE Biology A-LevelДокумент3 страницыNovember 2017 (v1) MS - Paper 1 CIE Biology A-LevelPhi BanОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент2 страницыCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент2 страницыCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Human Nutrition 2 MSДокумент6 страницHuman Nutrition 2 MSFarooq AhmadОценок пока нет
- Maximum Mark: 40: Cambridge International Examinations Cambridge International General Certificate of Secondary EducationДокумент2 страницыMaximum Mark: 40: Cambridge International Examinations Cambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- November 2017 (v1) MS - Paper 1 CIE Biology A-LevelДокумент3 страницыNovember 2017 (v1) MS - Paper 1 CIE Biology A-LevelPhi BanОценок пока нет
- November 2017 (v1) MS - Paper 1 CIE Biology A-LevelДокумент3 страницыNovember 2017 (v1) MS - Paper 1 CIE Biology A-LevelPhi BanОценок пока нет
- Cambridge International General Certificate of Secondary EducationДокумент20 страницCambridge International General Certificate of Secondary EducationFarooq AhmadОценок пока нет
- Human Nutrition 3 MSДокумент6 страницHuman Nutrition 3 MSFarooq AhmadОценок пока нет
- Chapter 2 Heat ConductionДокумент26 страницChapter 2 Heat ConductionFarooq AhmadОценок пока нет
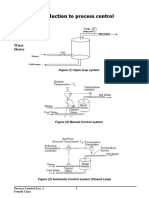
- Introduction to Chemical Process Dynamics and ControlДокумент32 страницыIntroduction to Chemical Process Dynamics and ControlFarooq AhmadОценок пока нет
- Chapter 3 Heat ConvectionДокумент41 страницаChapter 3 Heat ConvectionFarooq AhmadОценок пока нет
- Chapter 4Документ23 страницыChapter 4AhmadJaffarGulfarazОценок пока нет
- Chapter 4Документ23 страницыChapter 4AhmadJaffarGulfarazОценок пока нет
- Alternate Strategies For Conversion of Waste Plastic To FuelsДокумент8 страницAlternate Strategies For Conversion of Waste Plastic To FuelsFarooq AhmadОценок пока нет
- IS-LM Model Analysis of Monetary and Fiscal PolicyДокумент23 страницыIS-LM Model Analysis of Monetary and Fiscal PolicyFatima mirzaОценок пока нет
- Corneal Ulcers: What Is The Cornea?Документ1 страницаCorneal Ulcers: What Is The Cornea?me2_howardОценок пока нет
- Importance of SimilesДокумент10 страницImportance of Similesnabeelajaved0% (1)
- Hem Tiwari Vs Nidhi Tiwari Mutual Divorce - Revised VersionДокумент33 страницыHem Tiwari Vs Nidhi Tiwari Mutual Divorce - Revised VersionKesar Singh SawhneyОценок пока нет
- Ass 3 MGT206 11.9.2020Документ2 страницыAss 3 MGT206 11.9.2020Ashiqur RahmanОценок пока нет
- Cost-Benefit Analysis of The ATM Automatic DepositДокумент14 страницCost-Benefit Analysis of The ATM Automatic DepositBhanupriyaОценок пока нет
- Q2 SHS Intro To World Religion - Module 2Документ19 страницQ2 SHS Intro To World Religion - Module 2jan roiОценок пока нет
- Theories of ProfitДокумент39 страницTheories of Profitradhaindia100% (1)
- PbisДокумент36 страницPbisapi-257903405Оценок пока нет
- Subarachnoid Cisterns & Cerebrospinal FluidДокумент41 страницаSubarachnoid Cisterns & Cerebrospinal Fluidharjoth395Оценок пока нет
- Yuri LotmanДокумент3 страницыYuri LotmanNHОценок пока нет
- UntitledДокумент17 страницUntitledВладислав ПроскураОценок пока нет
- Ardipithecus Ramidus Is A Hominin Species Dating To Between 4.5 and 4.2 Million Years AgoДокумент5 страницArdipithecus Ramidus Is A Hominin Species Dating To Between 4.5 and 4.2 Million Years AgoBianca IrimieОценок пока нет
- Olimpiada Engleza 2017 CL A 7 A PDFДокумент4 страницыOlimpiada Engleza 2017 CL A 7 A PDFAnthony Adams100% (3)
- AP Biology 1st Semester Final Exam Review-2011.2012Документ13 страницAP Biology 1st Semester Final Exam Review-2011.2012Jessica ShinОценок пока нет
- Course Syllabus (NGCM 112)Документ29 страницCourse Syllabus (NGCM 112)Marie Ashley Casia100% (1)
- Simon Baumberg - Prokaryotic Gene ExpressionДокумент348 страницSimon Baumberg - Prokaryotic Gene ExpressionBodhi Dharma0% (1)
- Productivity in Indian Sugar IndustryДокумент17 страницProductivity in Indian Sugar Industryshahil_4uОценок пока нет
- Williams-In Excess of EpistemologyДокумент19 страницWilliams-In Excess of EpistemologyJesúsОценок пока нет
- (123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneДокумент35 страниц(123doc) - Internship-Report-Improving-Marketing-Strategies-At-Telecommunication-Service-Corporation-Company-VinaphoneK59 PHAN HA PHUONGОценок пока нет
- Introduction To Tensors: Contravariant and Covariant VectorsДокумент18 страницIntroduction To Tensors: Contravariant and Covariant VectorslilaОценок пока нет
- The Way To Sell: Powered byДокумент25 страницThe Way To Sell: Powered bysagarsononiОценок пока нет
- Family Health Nursing Process Part 2Документ23 страницыFamily Health Nursing Process Part 2Fatima Ysabelle Marie RuizОценок пока нет
- Social Case Study Report on Rape VictimДокумент4 страницыSocial Case Study Report on Rape VictimJulius Harvey Prieto Balbas87% (76)
- Diversity and InclusionДокумент23 страницыDiversity and InclusionJasper Andrew Adjarani80% (5)
- North American Indians - A Very Short IntroductionДокумент147 страницNorth American Indians - A Very Short IntroductionsiesmannОценок пока нет
- Expansion Analysis of Offshore PipelineДокумент25 страницExpansion Analysis of Offshore PipelineSAUGAT DUTTAОценок пока нет
- The Space of Reflection: Thirdness and Triadic Relationships in Family TherapyДокумент19 страницThe Space of Reflection: Thirdness and Triadic Relationships in Family TherapyTasos TravasarosОценок пока нет
- Rak Single DentureДокумент48 страницRak Single Denturerakes0Оценок пока нет
- GNED 500 Social AnalysisДокумент2 страницыGNED 500 Social AnalysisEshita SinhaОценок пока нет