Вам также может понравиться
- Harmonically Excited Vibration-Forced VibrationДокумент22 страницыHarmonically Excited Vibration-Forced VibrationOk SokОценок пока нет
- ME421-SDF (Forced)Документ11 страницME421-SDF (Forced)JohnathanОценок пока нет
- Undamped Forced VibrationДокумент10 страницUndamped Forced VibrationnadineОценок пока нет
- Indian Institute of Technology, Kharagpur: Ocean Engineering and Naval ArchitectureДокумент10 страницIndian Institute of Technology, Kharagpur: Ocean Engineering and Naval ArchitectureSuraj GaikwadОценок пока нет
- EL5107 M1-b: Reviu Dasar Sistem KendaliДокумент62 страницыEL5107 M1-b: Reviu Dasar Sistem KendaliDyah Ayu AnggreiniОценок пока нет
- Undamped Forced VibrationДокумент7 страницUndamped Forced VibrationReyman SolasОценок пока нет
- Songle Not A BotДокумент36 страницSongle Not A BotAyuguОценок пока нет
- Undamped Forced VibrationДокумент7 страницUndamped Forced VibrationShilca Geniel BarriosОценок пока нет
- Week2 3Документ50 страницWeek2 3Chandrali DasОценок пока нет
- Vibration Group 2 CompressedДокумент51 страницаVibration Group 2 CompressedRonaldRajumОценок пока нет
- Control Lec 2 SolvedДокумент16 страницControl Lec 2 SolvedMhabad ZebariОценок пока нет
- 03 - Forced VibrationДокумент13 страниц03 - Forced VibrationAbdulrahmanОценок пока нет
- Clase Act ElectroMagCirc Linearsys RotMachineДокумент9 страницClase Act ElectroMagCirc Linearsys RotMachinesfasdfОценок пока нет
- Prof. Jaime Alberto Escobar G. Faculty of EngineeringДокумент18 страницProf. Jaime Alberto Escobar G. Faculty of EngineeringSharon RodriguezОценок пока нет
- Classical Presentation Final For RealДокумент26 страницClassical Presentation Final For RealChad O'MeliaОценок пока нет
- Publication 11 13792 562Документ6 страницPublication 11 13792 562srinivasanОценок пока нет
- Digital Control SystemsДокумент31 страницаDigital Control SystemsKashif HussainОценок пока нет
- General Physics 1 First Quarter Important FormulasДокумент1 страницаGeneral Physics 1 First Quarter Important FormulasWarren PagsuyuinОценок пока нет
- 268 - Non-Linear Systems by K. C. Bhuyan PDFДокумент35 страниц268 - Non-Linear Systems by K. C. Bhuyan PDFMeenakshi VenkataramanОценок пока нет
- 268 - Non-Linear Systems by K. C. Bhuyan PDFДокумент35 страниц268 - Non-Linear Systems by K. C. Bhuyan PDFManika SahaОценок пока нет
- Physics 2Документ16 страницPhysics 2Dane Mica Rint QuinonesОценок пока нет
- L03 Quantum Mechanics - 1 Contd.Документ19 страницL03 Quantum Mechanics - 1 Contd.ashish kumarОценок пока нет
- Dynamics FULL Equation SheetДокумент2 страницыDynamics FULL Equation SheetZachОценок пока нет
- ME2115 - Forced Vibration PDFДокумент49 страницME2115 - Forced Vibration PDFwee kian pungОценок пока нет
- DSP Sp23 Wk3 230227Документ16 страницDSP Sp23 Wk3 230227Qaiser AbbasОценок пока нет
- The Integral Forms of The Fundamental Laws - 2Документ24 страницыThe Integral Forms of The Fundamental Laws - 2Jenille C. VillanuevaОценок пока нет
- Laplace and Z-TransformsДокумент23 страницыLaplace and Z-TransformsHussam AliraqiОценок пока нет
- 3.1 Frequency-Domain TheoryДокумент42 страницы3.1 Frequency-Domain TheoryLIM SHANYOUОценок пока нет
- Lecture 3Документ18 страницLecture 3Ronny Valero MontoyaОценок пока нет
- ME421-Single Degree of Freedom System (Damped) PDFДокумент13 страницME421-Single Degree of Freedom System (Damped) PDFAli Haider RizviОценок пока нет
- Sph4ue - Formula Sheet 2023Документ2 страницыSph4ue - Formula Sheet 2023speedyz3377Оценок пока нет
- Statics 2Документ5 страницStatics 2Byron Lorenzo YumolОценок пока нет
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Документ29 страницRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoОценок пока нет
- Damping: Single Degree of FreedomДокумент28 страницDamping: Single Degree of FreedomAbdulrahmanОценок пока нет
- Mechanics FormulasДокумент5 страницMechanics FormulasMarvin Dale WongОценок пока нет
- Chapter 3 - Forced-VibrationsДокумент68 страницChapter 3 - Forced-VibrationsNanang Ali SutisnaОценок пока нет
- Energy Method VariationalДокумент23 страницыEnergy Method VariationalVaibhav ChaudhariОценок пока нет
- Lecture 2 Second Lecture 2023Документ21 страницаLecture 2 Second Lecture 2023yakwetuОценок пока нет
- Lecture 21Документ38 страницLecture 21yakwetuОценок пока нет
- MIE100H1 - 20195 - 631572298320MIE 100 CheatsheetДокумент2 страницыMIE100H1 - 20195 - 631572298320MIE 100 CheatsheetSCR PpelusaОценок пока нет
- CaseДокумент3 страницыCaseZeeshan MahmoodОценок пока нет
- PHYS 102 Final Exam: 1. A Particle With Charge Q Is Moving in A Uniform Magnetic FieldДокумент4 страницыPHYS 102 Final Exam: 1. A Particle With Charge Q Is Moving in A Uniform Magnetic FieldNano SuyatnoОценок пока нет
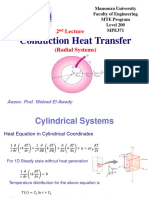
- Lecture 2 Conduction Heat Transfer Radial SystemsДокумент11 страницLecture 2 Conduction Heat Transfer Radial Systemscity.stare.marketОценок пока нет
- Logarithmic Decrement: Consider Eq.8A For Underdamped SystemДокумент6 страницLogarithmic Decrement: Consider Eq.8A For Underdamped SystemVjh GОценок пока нет
- ATOPCV1 1 0 Quantum Mechanics IДокумент81 страницаATOPCV1 1 0 Quantum Mechanics IAshish MehraОценок пока нет
- Postulates of Quantum MechanicsДокумент13 страницPostulates of Quantum MechanicsJagadeesh PhysicsОценок пока нет
- Tutorial 4 - Solutions - Forced VibrationsДокумент60 страницTutorial 4 - Solutions - Forced Vibrationsmohd.a.alawadОценок пока нет
- Physics 1301 Equation SheetДокумент2 страницыPhysics 1301 Equation Sheeth.krijestoracОценок пока нет
- Chapter 4 FinalДокумент9 страницChapter 4 FinalMuntazir MehdiОценок пока нет
- Vibration Lecture 3Документ44 страницыVibration Lecture 3منذر كمالОценок пока нет
- Modeling of Basic SystemsДокумент46 страницModeling of Basic SystemsAbhinav ReddyОценок пока нет
- LT3 C2 L2 Handout FinalДокумент15 страницLT3 C2 L2 Handout FinalSabОценок пока нет
- PHY108 Spring22 EquationSheet4Документ3 страницыPHY108 Spring22 EquationSheet4yasiv29532Оценок пока нет
- A-level Maths Revision: Cheeky Revision ShortcutsОт EverandA-level Maths Revision: Cheeky Revision ShortcutsРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОт EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsОценок пока нет
- Mechanical Vibration (ME-411) : Week 04Документ12 страницMechanical Vibration (ME-411) : Week 04Tariq AlamОценок пока нет
- Vibration Isolation Week 61Документ20 страницVibration Isolation Week 61Tariq AlamОценок пока нет
- Week 01-2Документ60 страницWeek 01-2Tariq AlamОценок пока нет
- Mechanical Vibration (ME-411) : Week 03-04Документ53 страницыMechanical Vibration (ME-411) : Week 03-04Tariq AlamОценок пока нет
- Mechanical Vibration (ME-411) : Week 04Документ12 страницMechanical Vibration (ME-411) : Week 04Tariq AlamОценок пока нет
- Takeshi Amemiya - Introduction To Statistics and EconometricsДокумент196 страницTakeshi Amemiya - Introduction To Statistics and EconometricsLilian HancuОценок пока нет
- Quantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Документ5 страницQuantum Physics I (8.04) Spring 2016 Assignment 8: Problem Set 8Fabian M Vargas FontalvoОценок пока нет
- Logan Applied Mathematics Solution ManualДокумент63 страницыLogan Applied Mathematics Solution Manualjd24680100% (2)
- Pre University h2 Further MathematicsДокумент22 страницыPre University h2 Further MathematicsLeng RyanОценок пока нет
- Unit 7 Algebraic ExpressionДокумент32 страницыUnit 7 Algebraic Expressionvidyamane23Оценок пока нет
- Activity 3: Accumulation FunctionsДокумент4 страницыActivity 3: Accumulation FunctionsteachopensourceОценок пока нет
- Discrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDFДокумент26 страницDiscrete B-Splines and Subdivision Techniques in Computer-Aided Geometric Design and Computer Graphics PDF姜豪Оценок пока нет
- Contributions To The Understanding of The MSK ModulationДокумент14 страницContributions To The Understanding of The MSK ModulationResistor100% (1)
- Keyboard Shorcuts Mathcad15Документ6 страницKeyboard Shorcuts Mathcad15humberto menesesОценок пока нет
- MAP 2302, Differential Equations ODE Test 1 Solutions Summer 09Документ7 страницMAP 2302, Differential Equations ODE Test 1 Solutions Summer 09alphacetaОценок пока нет
- Seemous PaperДокумент2 страницыSeemous PaperAbd HafidОценок пока нет
- German English Mat 00 Hym AДокумент140 страницGerman English Mat 00 Hym AOsho Arun LoveОценок пока нет
- Error Dil PDFДокумент8 страницError Dil PDFAmar MandalОценок пока нет
- Mathematical Induction ACEДокумент9 страницMathematical Induction ACEZhiTing96Оценок пока нет
- Solutions To Exercises: A First Course in Differential Geometry Woodward and BoltonДокумент7 страницSolutions To Exercises: A First Course in Differential Geometry Woodward and Boltonhassan aliОценок пока нет
- Mathematics Jan 2012Документ12 страницMathematics Jan 2012Kalianne SmithОценок пока нет
- Non Linearity in Structural Dynamics Detection Identification and ModellingДокумент670 страницNon Linearity in Structural Dynamics Detection Identification and ModellingguvenccОценок пока нет
- Schonemann Trace Derivatives PresentationДокумент82 страницыSchonemann Trace Derivatives PresentationGiagkinis GiannisОценок пока нет
- Tos Lamp Grade 9Документ3 страницыTos Lamp Grade 9Eliza Calixto-SorianososОценок пока нет
- Partial Differential Equation Part BДокумент27 страницPartial Differential Equation Part Baayush.5.parasharОценок пока нет
- FullДокумент437 страницFullFelipe DiazОценок пока нет
- Analytical Modelling and Numerical Experiment Forsimultaneous Identification of Unbalance and Rolling-Bearingcoefficients of The Continuous Single-DiДокумент25 страницAnalytical Modelling and Numerical Experiment Forsimultaneous Identification of Unbalance and Rolling-Bearingcoefficients of The Continuous Single-DiAgustín Erasmo Juárez MartínezОценок пока нет
- 1.discuss The Frequency Domain Techniques of Image Enhancement in DetailДокумент19 страниц1.discuss The Frequency Domain Techniques of Image Enhancement in DetailsubbuОценок пока нет
- DAAI - Lecture - 04 - With - Solutions - 10oct22Документ84 страницыDAAI - Lecture - 04 - With - Solutions - 10oct22于淼Оценок пока нет
- Class Zone - Trigonometric Reference AnglesДокумент7 страницClass Zone - Trigonometric Reference AnglesDjemi SiswantoОценок пока нет
- Mapping Results To Path Chimney ExampleДокумент6 страницMapping Results To Path Chimney Examplebalachandar19k0% (1)
- Fundamentals of CFDДокумент276 страницFundamentals of CFDSainath SatishОценок пока нет
- Lesson 3. Lesson Plan Solving Quadratic Equations by FactoringДокумент7 страницLesson 3. Lesson Plan Solving Quadratic Equations by Factoringcarla mae navarroОценок пока нет
- Find Courses by Course NumberДокумент1 страницаFind Courses by Course NumberramureddygsОценок пока нет
- Lecture Notes - Econometrics I - Andrea WeberДокумент119 страницLecture Notes - Econometrics I - Andrea WeberBaigalmaa NyamtserenОценок пока нет