Вам также может понравиться
- SA 8B RussianДокумент35 страницSA 8B Russianvonlolzor100% (1)
- конспект лекций часть - 4Документ44 страницыконспект лекций часть - 4ФилиппОценок пока нет
- конспект лекций часть - 2Документ64 страницыконспект лекций часть - 2ФилиппОценок пока нет
- Гл 6Документ26 страницГл 6Стас ДанельскийОценок пока нет
- P3A тр-ровДокумент60 страницP3A тр-ровВадим МудрикОценок пока нет
- Efe 236 BДокумент119 страницEfe 236 BTESLA IngenieriaОценок пока нет
- Соболев Расчет Зануления 2004 с ДополнДокумент39 страницСоболев Расчет Зануления 2004 с ДополнdmaxОценок пока нет
- реле рус лбДокумент29 страницреле рус лбДжалал ИбрагимовОценок пока нет
- RZ VPДокумент107 страницRZ VPAida AdylbekovaОценок пока нет
- Лаб4Документ11 страницЛаб4МММОценок пока нет
- Достоинства и недостатки режима изолированной нейтралиДокумент1 страницаДостоинства и недостатки режима изолированной нейтралиanton.busyginОценок пока нет
- LPG899Документ6 страницLPG899Prof. Arturo GilsonОценок пока нет
- MiCOM Cat 2014Документ56 страницMiCOM Cat 2014RusiaОценок пока нет
- 2. Отработка экспл.навыков по измер.сопр.изоляции СЭО..испр.Документ10 страниц2. Отработка экспл.навыков по измер.сопр.изоляции СЭО..испр.Слава УкраїніОценок пока нет
- Fragment 22157Документ10 страницFragment 22157Yernar SalimovОценок пока нет
- цаууцаДокумент1 страницацаууцаАртем ШугайОценок пока нет
- Bibliofond 550922Документ22 страницыBibliofond 550922abbosxonerkinov267Оценок пока нет
- ДокладДокумент3 страницыДокладBirty RonnyОценок пока нет
- РЗА Вар.16 Люблин Ф.А.Документ21 страницаРЗА Вар.16 Люблин Ф.А.ФилиппОценок пока нет
- РД 153-34.0-20.527-98 (КЗ)Документ151 страницаРД 153-34.0-20.527-98 (КЗ)SheindsОценок пока нет
- ТВН - вар. 83 (зад. 1,3,4,5) Люблин Ф.А.Документ21 страницаТВН - вар. 83 (зад. 1,3,4,5) Люблин Ф.А.ФилиппОценок пока нет
- Atnishkin Ab@Документ85 страницAtnishkin Ab@Jose Rafael CastroОценок пока нет
- АдельДокумент6 страницАдельplmisha97Оценок пока нет
- Short Circuit Current Calculation (RUS)Документ25 страницShort Circuit Current Calculation (RUS)FittillОценок пока нет
- Комплексные Инновационные Решения По Заземлению Нейтрали в Сетях 6-35 КВДокумент7 страницКомплексные Инновационные Решения По Заземлению Нейтрали в Сетях 6-35 КВsergei_titОценок пока нет
- Лабораторная работа 3 ЛяпушкинДокумент7 страницЛабораторная работа 3 ЛяпушкинAleksey LyapuschkinОценок пока нет
- Шалин РЕЛЕЙНАЯ ЗАЩИТА ОТ ЗАМЫКАНИЙ НА ЗЕМЛЮ В СЕТЯХ С РЕЗИСТИВНЫМ ЗАЗЕМЛЕНИЕМ НЕЙТРАЛИДокумент10 страницШалин РЕЛЕЙНАЯ ЗАЩИТА ОТ ЗАМЫКАНИЙ НА ЗЕМЛЮ В СЕТЯХ С РЕЗИСТИВНЫМ ЗАЗЕМЛЕНИЕМ НЕЙТРАЛИІван ІванюкОценок пока нет
- Relay ProtectionДокумент154 страницыRelay ProtectionAida AdylbekovaОценок пока нет
- КОПЬЕВ В.Н. Релейная защита PDFДокумент154 страницыКОПЬЕВ В.Н. Релейная защита PDFРоман КиямовОценок пока нет
- 3. Защита и АвтоматикаДокумент120 страниц3. Защита и АвтоматикаАртем ВашестикОценок пока нет
- Защитное заземление, занулениеДокумент9 страницЗащитное заземление, занулениеapi-3823276100% (6)
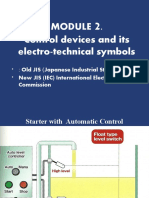
- MODULE 2. Control Device & It's Electro-Technical SymbolsДокумент56 страницMODULE 2. Control Device & It's Electro-Technical SymbolsSharapov Mechanic (Все просто)Оценок пока нет
- ReclosersДокумент19 страницRecloserstudorОценок пока нет
- Miniatyurnye Koaksialnye Filtry Dlya Tsepey Upravleniya Mikroelektronnyh UstroystvДокумент6 страницMiniatyurnye Koaksialnye Filtry Dlya Tsepey Upravleniya Mikroelektronnyh UstroystvAlexandr BabaskinОценок пока нет
- ТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙДокумент34 страницыТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙGulshan HaciyevaОценок пока нет
- ТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙДокумент34 страницыТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙGulshan HaciyevaОценок пока нет
- RC цепьДокумент8 страницRC цепьJafarov VuqarОценок пока нет
- Manual UPS R 1 3kVA Ru RuДокумент28 страницManual UPS R 1 3kVA Ru RuStanislav ArhipovОценок пока нет
- 12 p21-25Документ5 страниц12 p21-25Emilian Angelov AngelovОценок пока нет
- Каталог ЗНГДокумент12 страницКаталог ЗНГVladimir BoikoОценок пока нет
- 1 - Методичка к СРС-1-2Документ7 страниц1 - Методичка к СРС-1-2SakenОценок пока нет
- Цифровые Устройства Дифференциальной ЗащитыДокумент273 страницыЦифровые Устройства Дифференциальной ЗащитыFeigin LeonidОценок пока нет
- Manual LX122Документ35 страницManual LX122aleksandrОценок пока нет
- Типовые решения - ПС-AST (16.09.2021)Документ26 страницТиповые решения - ПС-AST (16.09.2021)tudorОценок пока нет
- Technical Data - Zmg300 - Ru - GSMДокумент8 страницTechnical Data - Zmg300 - Ru - GSMJohn ZúñigaОценок пока нет
- Manual Iki30Документ18 страницManual Iki30kl fieОценок пока нет
- Technical Data Zmg3xxru PDFДокумент8 страницTechnical Data Zmg3xxru PDFVadimОценок пока нет
- Лабораторная работа, Сириус 2 МЛДокумент15 страницЛабораторная работа, Сириус 2 МЛДанис ХайруллинОценок пока нет
- 978 5 7996 1289 4 - 2014Документ226 страниц978 5 7996 1289 4 - 2014Bolotnyi NickolaiОценок пока нет
- 793Документ5 страниц793Yernar SalimovОценок пока нет
- Lab 7Документ33 страницыLab 7Алексей СемёновОценок пока нет
- Контроллер ККМ (PFC) L6561 » Школа для электрика - все об электротехнике и электроникеДокумент4 страницыКонтроллер ККМ (PFC) L6561 » Школа для электрика - все об электротехнике и электроникеАлексей АндрияшОценок пока нет
- plr1-63.3 ManualДокумент2 страницыplr1-63.3 ManualformadevlandОценок пока нет
- Calculul Protectiei LinieiДокумент26 страницCalculul Protectiei LinieisergiuОценок пока нет
- Гл 10 PDFДокумент66 страницГл 10 PDFВадимОценок пока нет
- User Manual ZMR110 v11.01.07.13 RuДокумент34 страницыUser Manual ZMR110 v11.01.07.13 Rurussu_gabi7233Оценок пока нет
- zmr110 v11 Rukovodstvo PDFДокумент34 страницыzmr110 v11 Rukovodstvo PDFVadimОценок пока нет
- Реферат (Калинин Д.Ю.)Документ19 страницРеферат (Калинин Д.Ю.)Дмитрий КалининОценок пока нет
- ГОСТ Р 50254 Расчет электродинамических усилийДокумент30 страницГОСТ Р 50254 Расчет электродинамических усилийMikeОценок пока нет
- 84825267Документ7 страниц84825267НиколайОценок пока нет
- Запросы в 1С за 3 часа. Часть 1. ПрезентацияДокумент55 страницЗапросы в 1С за 3 часа. Часть 1. ПрезентацияraduОценок пока нет
- ЛАБОРАТОРНАЯ РАБОТА № 4 ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯДокумент4 страницыЛАБОРАТОРНАЯ РАБОТА № 4 ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯibelovОценок пока нет
- 1.12 Методический Материал. ИнтерфейсДокумент204 страницы1.12 Методический Материал. ИнтерфейсForwesОценок пока нет
- الصف التاسع مركز المناهجДокумент96 страницالصف التاسع مركز المناهججارالله عليОценок пока нет