Вам также может понравиться
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОт EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeОценок пока нет
- Control automático aplicado: Prácticas de laboratorio 2da. EdiciónОт EverandControl automático aplicado: Prácticas de laboratorio 2da. EdiciónРейтинг: 3.5 из 5 звезд3.5/5 (5)
- Guia CirosДокумент91 страницаGuia CirosHéctor PeñaОценок пока нет
- Actividad 1 PDFДокумент7 страницActividad 1 PDFAarón AlfaroОценок пока нет
- 1ro SecundariaДокумент35 страниц1ro Secundariamarlo sislaОценок пока нет
- Seguridad en Celdas RoboticasДокумент21 страницаSeguridad en Celdas RoboticasMario J. Díaz ZegarraОценок пока нет
- TEMA02Документ33 страницыTEMA02Manuel Garcia SuarezОценок пока нет
- Robotica BasicaДокумент37 страницRobotica BasicaAna Gabriela Rojas ReasОценок пока нет
- Lab NaoДокумент14 страницLab NaoDiego Di CalderónОценок пока нет
- Cuestionario PDFДокумент18 страницCuestionario PDFDiana CacuangoОценок пока нет
- Medidas de seguridad para robotsДокумент12 страницMedidas de seguridad para robotsNanoUrraОценок пока нет
- Sistema brazo robotico industrialДокумент89 страницSistema brazo robotico industrialLuis AvilaОценок пока нет
- 1.3 SubsistemasДокумент5 страниц1.3 SubsistemasYesi Salazar LimasОценок пока нет
- Presentacion Cosimir Festo (Español)Документ87 страницPresentacion Cosimir Festo (Español)Rafael Perez Meza100% (1)
- Robotica I ParcialДокумент4 страницыRobotica I ParcialAaron HernandezОценок пока нет
- Celdas RoboticasДокумент27 страницCeldas RoboticasXimena GonzalezОценок пока нет
- SABER 3 Unidad 2 ElizaldeДокумент13 страницSABER 3 Unidad 2 ElizaldeJosé Manuel Ávila LaraОценок пока нет
- Clase 2 Celda RoboticaДокумент54 страницыClase 2 Celda RoboticaAlexander Rios100% (1)
- Emit-527 MaterialДокумент19 страницEmit-527 MaterialbryanОценок пока нет
- U2 TEMA 2 - ESTADOS FUNDAMENTALES de La ROBOTICA ACTUALДокумент23 страницыU2 TEMA 2 - ESTADOS FUNDAMENTALES de La ROBOTICA ACTUALEliot BalcazarОценок пока нет
- Course Fanuc BasicoДокумент77 страницCourse Fanuc BasicoAngel AdautaОценок пока нет
- Robot industrial: conceptos y componentesДокумент3 страницыRobot industrial: conceptos y componentesMariano Ënriquë Dë JësusОценок пока нет
- Robots IndustrialesДокумент9 страницRobots IndustrialesKarenOrtizОценок пока нет
- Robotic AДокумент7 страницRobotic AEDuu Scénariste-RastoneОценок пока нет
- Qué Es Un RobotДокумент5 страницQué Es Un RobotJuan Gabriel Chavez MarencoОценок пока нет
- Seguridad en RobotsДокумент2 страницыSeguridad en RobotsAraceli Perez ConchasОценок пока нет
- Manual Prácticas CIMДокумент39 страницManual Prácticas CIMGustavo ZariОценок пока нет
- CLASE 01 - Robótica Educativa, Aplicada y Creativa CLASE 01Документ23 страницыCLASE 01 - Robótica Educativa, Aplicada y Creativa CLASE 01luis prelisОценок пока нет
- Robotica IndustrialДокумент97 страницRobotica IndustrialFranklin Jara Moncayo100% (3)
- ComandosДокумент1 страницаComandosBriseida GomezОценок пока нет
- Morfologia de Los RobotsДокумент7 страницMorfologia de Los RobotsJose A100% (1)
- ComandosДокумент1 страницаComandosBriseida GomezОценок пока нет
- Curso de Robótica: Clasificación y Aplicaciones IndustrialesДокумент49 страницCurso de Robótica: Clasificación y Aplicaciones IndustrialesJoseCarlosCastroRodriguezОценок пока нет
- COSIMIRДокумент28 страницCOSIMIRJoseph0% (1)
- Robótica - Primer Parcial - Material de Apoyo PDFДокумент52 страницыRobótica - Primer Parcial - Material de Apoyo PDFCrispin PMОценок пока нет
- Definición y Clasificación de Robots PDFДокумент31 страницаDefinición y Clasificación de Robots PDFjuanchoanayaОценок пока нет
- PDF Taller de Tecnologia Grado 10 DDДокумент3 страницыPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueОценок пока нет
- 2 1Документ9 страниц2 1VladimirОценок пока нет
- MANUAL Unidad 4 - RobóticaДокумент29 страницMANUAL Unidad 4 - RobóticaMDureОценок пока нет
- Clase 1 IntroducciónДокумент31 страницаClase 1 IntroducciónIshmael AcevedoОценок пока нет
- RoboticaДокумент113 страницRoboticaRafael RodriguezОценок пока нет
- Monografía Robótica e Inteligencia ArtificialДокумент20 страницMonografía Robótica e Inteligencia ArtificialBryant Christian Quiroz Vera90% (10)
- Presentacion RoboticaДокумент27 страницPresentacion RoboticaJezzi GLОценок пока нет
- Consulta RoboticaДокумент12 страницConsulta RoboticaDaniel Tirado SánchezОценок пока нет
- ROBOTICAДокумент7 страницROBOTICAyoani gonzalez herreraОценок пока нет
- Prac2 Seg RobДокумент20 страницPrac2 Seg RobJacke AngelesОценок пока нет
- C9 RoboticaДокумент39 страницC9 Roboticamonica cuti magañoОценок пока нет
- Origen y Funciones de la Robótica enДокумент2 страницыOrigen y Funciones de la Robótica enAnonymous Uf021dОценок пока нет
- Robótica PDFДокумент6 страницRobótica PDFmariaml15Оценок пока нет
- Definición Del Robot IndustrialДокумент9 страницDefinición Del Robot IndustrialStalin AlvarezОценок пока нет
- Apuntes de Neumática BásicaДокумент21 страницаApuntes de Neumática BásicaJose Ramon Rivas MoralesОценок пока нет
- Competencias de robótica: tipos y requisitosДокумент5 страницCompetencias de robótica: tipos y requisitosKetzy PittyОценок пока нет
- MANUAL DE PRÁCTICAS DE ROBÓTICAДокумент37 страницMANUAL DE PRÁCTICAS DE ROBÓTICAAdrian ValОценок пока нет
- Mecanismo RoboticoДокумент9 страницMecanismo RoboticoclintonОценок пока нет
- 2 SeguridadДокумент8 страниц2 Seguridadhector__hernandez2611Оценок пока нет
- Robótica AvanzadaДокумент7 страницRobótica AvanzadaRödrïgüëz Lëdï SäbëtdОценок пока нет
- Medidas de Seguridad de Robots DepinturaДокумент12 страницMedidas de Seguridad de Robots Depintura28030907Оценок пока нет
- Trabajo Final - Panel Led 8x40Документ30 страницTrabajo Final - Panel Led 8x40Christiam Paul Ramírez100% (2)
- Entendiendo Prueba de Resistencia de Aislamiento PDFДокумент6 страницEntendiendo Prueba de Resistencia de Aislamiento PDFbofo_100_aleОценок пока нет
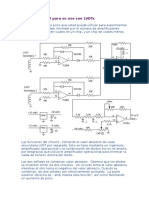
- Un Circuito Fácil para Su Uso Con LVDTsДокумент4 страницыUn Circuito Fácil para Su Uso Con LVDTsKurtXОценок пока нет
- Edel NorДокумент7 страницEdel NorKurtXОценок пока нет
- Entendiendo Prueba de Resistencia de Aislamiento PDFДокумент6 страницEntendiendo Prueba de Resistencia de Aislamiento PDFbofo_100_aleОценок пока нет
- Manual de Usuario Del Programa de Gestión de La DosificadoraДокумент38 страницManual de Usuario Del Programa de Gestión de La DosificadoraKurtXОценок пока нет
- Programa Con LOGO! 8Документ3 страницыPrograma Con LOGO! 8KurtXОценок пока нет
- Cable THWДокумент2 страницыCable THWjcluli100% (1)
- Sockets en WindowsДокумент52 страницыSockets en Windowslapivot100% (1)
- Manual de Usuario Del Programa de Gestión de La DosificadoraДокумент38 страницManual de Usuario Del Programa de Gestión de La DosificadoraKurtXОценок пока нет
- ReadmeДокумент1 страницаReadmesport0378Оценок пока нет
- 4 SEL Metodos - IterativosДокумент42 страницы4 SEL Metodos - IterativosKurtXОценок пока нет
- Data EEPROM and FLASH Program MemoryДокумент1 страницаData EEPROM and FLASH Program MemoryKurtXОценок пока нет
- Events and CallbacksДокумент2 страницыEvents and CallbacksKurtXОценок пока нет
- Proy Turbina - 1er AvanceДокумент8 страницProy Turbina - 1er AvanceKurtXОценок пока нет
- SUSTENTACIONДокумент11 страницSUSTENTACIONDavid BaronОценок пока нет
- Sistemas de ControlДокумент11 страницSistemas de ControlArturoОценок пока нет
- Interfases Perifericos y Programación IIДокумент11 страницInterfases Perifericos y Programación IIArturoОценок пока нет
- Robótica Visión Industrial Clase1Документ19 страницRobótica Visión Industrial Clase1Braiyan Miguel Arias SalazarОценок пока нет
- Los Robots en Primero de La ESO PDFДокумент7 страницLos Robots en Primero de La ESO PDFMarco DiazОценок пока нет
- Discurso RoboticaДокумент2 страницыDiscurso RoboticaFranciscoОценок пока нет
- Modulo 1Документ45 страницModulo 1Nicolas CallaoОценок пока нет
- Robótica Olimpiada Estudiantil BoliviaДокумент32 страницыRobótica Olimpiada Estudiantil BoliviaClaudia Aguilar ValdiviaОценок пока нет
- Banco de Preguntas - Esfm - 2018-1Документ2 страницыBanco de Preguntas - Esfm - 2018-1Diego GodinОценок пока нет
- Curso de Robotica BásicaДокумент56 страницCurso de Robotica BásicaCruz Enrique García100% (1)
- INFOGRAFIAДокумент2 страницыINFOGRAFIAAlexander PinedaОценок пока нет
- Guia de Trabajo Libro Canon - Visiones de RobotДокумент1 страницаGuia de Trabajo Libro Canon - Visiones de RobotNicolas Guerrero PenhaОценок пока нет
- Tema - Semana 4 - Importante PC1 y PC2Документ2 страницыTema - Semana 4 - Importante PC1 y PC2eduardoОценок пока нет
- Linea de TiempoДокумент4 страницыLinea de TiempoAllison Huitrón MaldonadoОценок пока нет
- Exoesqueleto rehabilitaciónДокумент193 страницыExoesqueleto rehabilitacióntu kuro ta rotoОценок пока нет
- 1.5 AplicacionesДокумент19 страниц1.5 AplicacionesErick Perez PalaciosОценок пока нет
- Analisis Constitucional de La Relacion EДокумент13 страницAnalisis Constitucional de La Relacion EstzvhcqrdgОценок пока нет
- Guía COSIMIRДокумент16 страницGuía COSIMIRronmasterОценок пока нет
- Mod Din RobotДокумент9 страницMod Din RobotAlejandra Bejarano RinconОценок пока нет
- Ecosistemas - Tema 11 Cibernetica e InformaticaДокумент5 страницEcosistemas - Tema 11 Cibernetica e InformaticaPaloma YucraОценок пока нет
- Artículos Científicos de RobóticaДокумент19 страницArtículos Científicos de RobóticaMarilyn AlvaОценок пока нет
- Como Funcionan Los RobotsДокумент8 страницComo Funcionan Los Robotsyolanda100% (1)
- A Partir de La Teoría Triádica de La InteligenciaДокумент2 страницыA Partir de La Teoría Triádica de La Inteligenciaskaylanders100% (1)
- Referencia 1 RoboticaДокумент4 страницыReferencia 1 RoboticaOmar Lopez C.Оценок пока нет
- Robótica: estado del arteДокумент62 страницыRobótica: estado del arteALBERTO CCASTRO TREJOОценок пока нет
- Guía de Actividades y Rúbrica de Evaluación Fase 2 Realizar Diagnóstico de Necesidades de AprendizajeeДокумент10 страницGuía de Actividades y Rúbrica de Evaluación Fase 2 Realizar Diagnóstico de Necesidades de Aprendizajeeandres morenoОценок пока нет
- Sistemas Flexibles de Manufactura BisДокумент10 страницSistemas Flexibles de Manufactura BisLuisОценок пока нет
- Capitulo 8 - HalocodeДокумент6 страницCapitulo 8 - HalocodeMariana Salazar GarciaОценок пока нет
- Automatización industrialДокумент3 страницыAutomatización industrialAndres MenjuraОценок пока нет
- SECTORES ECONÓMICOS DiapositivasДокумент18 страницSECTORES ECONÓMICOS DiapositivasOlga Veronica Garcia L. PsicólogaОценок пока нет