Академический Документы
Профессиональный Документы
Культура Документы
Strength of Materials (HE 306)
Загружено:
Anu ParameswaranИсходное описание:
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Strength of Materials (HE 306)
Загружено:
Anu ParameswaranАвторское право:
Доступные форматы
7/12/12
WAVE DAMAGE. November 19, 2002
The leaking oil tanker Prestige sinks some 240km off Spain's north-
western coast, taking more than 70,000 tonnes of fuel to the seabed
4 km below.
Click to edit Master subtitle style
7/12/12
Strength of Materials (HE
306)
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
7/12/12
7/12/12
7/12/12
INTRODUCTIONCONCEPT OF STRESS
2 STRESS AND STRAINAXIAL LOADING
3 TORSION
4 PURE BENDING
5 ANALYSIS AND DESIGN OF BEAMS FOR BENDING
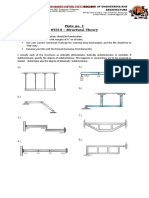
In the experiment, a wire of a given
thickness and length was used to
suspend a basket. The
basket was filled slowly with sand, fed
from an adjacently suspended hopper
(Figure). When the wire suspending
the basket breaks, a spring closes the
hopper opening, and the basket falls a
short distance into a hole, so as not to
upset the basket. The sand in the
basket was then weighed to establish
the tensile strength of the wire.
7/12/12
What is Mechanics?
Mechanics is the science which describes and predicts
the conditions of rest or motion of bodies under the
action of forces.
Categories of Mechanics:
- Rigid bodies Statics and Dynamics
- Deformable bodies Strength of Materials
- Fluids
Mechanics is an applied science - it is not an abstract
or pure science but does not have the empiricism found
in other engineering sciences.
Mechanics is the foundation of most engineering
sciences and is an indispensable prerequisite to their
study.
7/12/12
Fundamental Concepts
Space - associated with the notion of the position of a point P given in
terms of three coordinates measured from a reference point or origin.
Time - definition of an event requires specification of the time and
position at which it occurred.
Mass - used to characterize and compare bodies, e.g., response to
earths gravitational attraction and resistance to changes in translational
motion.
Force - represents the action of one body on another. A force is
characterized by its point of application, magnitude, and direction, i.e.,
a force is a vector quantity.
In Newtonian Mechanics, space, time, and mass are absolute concepts,
independent of each other. Force, however, is not independent of the
other three. The force acting on a body is related to the mass of the body
and the variation of its velocity with time.
7/12/12
EQUILIBRIUM
This section will be limited to one- or two-dimensional systems, where all the forces and
couples will be acting in on plane; such a system of forces is called a copl anar system.
In two dimensions, equilibrium is achieved when the following laws are satisfied:
upward forces = downward forces ,
forces to the l eft = forces to the ri ght and
cl ockwi se coupl es = counter cl ockwi se coupl es.
Taki ng moments about B
cl ockwi se coupl es =
counter cl ockwi se coupl es
RAx4 = 3 x 6 + 1 0 x 2
RA = (18 + 20 )/4 RA =
9.5 kN
Resol vi ng forces verti cal l y,
RA+RB = (3+10)
or RB = (13 - 9.5) = 3.5
kN
Determi ne the reacti ons of RA and RB for the si mpl y-supported beam
7/12/12
Tension and compression: direct
stresses
One of the simplest loading conditions of a material is that of tensi on, in which the fibres
of the material are stretched.
Consider, for example, a long steel wire held rigidly at its upper end and loaded by a mass
hung from the lower end. If vertical movements of the lower end are observed during
loading it will be found that the wire is stretched by a small, but measurable,
amount from its original unloaded length. The material of the wire is composed of a large
number of small crystals which are only visible under a microscopic study; these crystals
have irregularly shaped boundaries, and largely random orientations with respect to each
other; as loads are applied to the wire, the crystal structure of the metal is distorted.
For small loads it is found that
the extension of the wire is
roughly proportional to the
applied load. This linear
relationship between load
and extension was first
discovered by Robert
Hooke in 1678; a material
showing this characteristic is
said to obey Hooke's law.
7/12/12
As the tensile load in the wire is increased, a stage is reached where the material ceases
to show this linear characteristic; the corresponding point on the load-extension curve is
known as the l i mi t of proporti onal i ty.
If the wire is made from a high-strength steel then the l oad-extensi on curve up to the
breaking point has the form shown.
Beyond the limit of proportionality the extension of the wire increases non-linearly up to
the elastic limit and, eventually, the breaking point.
Elastic limit is important because it divides the load-extension curve into two regions. For
loads up to the elastic limit, the wire returns to its original un-stretched length on removal
of the loads; this properly of a material to recover its original form on removal of the
loads is known as el asti ci ty; the steel wire behaves as a still elastic spring.
When loads are applied above the el asti c l i mi t, and are then removed, it is found that
the wire recovers onl y part of its extension and is stretched permanently;
in this condition the wire is said to have undergone an i nel asti c, or pl asti c extension.
For most materials, the limit of proportionality and the elastic limit are assumed to have the same value.
In the case of elastic extensions, work performed in stretching the wire is stored as strain energy in
the material; this energy is recovered when the loads are removed. During inelastic extensions,
work is performed in making permanent changes in the internal structure of the material. Not all
the work can be recovered : balance of this energy reappears in other forms, mainly as
heat.
7/12/12
When tensile tests are carried out on steel wires of the same material, but of di fferent
cross secti onal area, the breaking loads are found to be proporti onal approximately
to the respecti ve cross-secti onal areas of the wires.
This is so because the tensile strength is governed by the intensity of force on a normal
cross-section of a wire, and not by the total force.
This intensity of force is known as stress, denoted by .
Suppose A is an element of area of the cross section of
the bar, if the normal force acting on this element is P ,
then the tensile stress at this point of the cross-section is
defined as the limiting value of the ratio ( P/ A) as A
becomes infinitesimally small. Thus,
When the forces P in Figure are reversed in direction at each end of
the bar they tend to compress the bar; the loads then give rise to
compressive stresses.
Tensile and compressive stresses are together referred to as direct
(or normal) stresses, because they act perpendicularly to the surface.
7/12/12
A steel bar of rectangular cross-section, 3 cm by 2 cm, carries an axial load of 30 kN.
Estimate the average tensile stress over a normal cross-section of the bar.
7/12/12
A steel bolt, 2.50 cm in diameter, carries a tensile load of 40 kN. Estimate the
average tensile stress at the section a and at the screwed section b, where the
diameter at the root of the thread is 2.10 cm.
7/12/12
Tensi l e and compressi ve strai ns
In the steel wire experiment we discussed the extension of the whole wire.
If we measure the extension of, say, the lowest quarter-length of the wire we find that
for a gi ven l oad i t i s equal to a quarter of the extensi on of the whol e wi re.
In general we find that, at a given load, the ratio of the extension of any length to that
length is constant for all parts of the wire; this ratio is known as the tensi l e strai n.
Suppose the initial unstrained length of the wire is Lo, and e is the extension due to
straining; the tensile strain is defined as
This definition of strain is useful only for small distortions, in which the extension e is
small compared with the original length Lo;
this definition is adequate for the study of most engineering problems, where we are
concerned with values of of the order 0.001, or so.
If a material is compressed the resulting strain is defined in a similar way, except that
e is the contraction of a length.
We note that strai n i s a non-di mensi onal quanti ty, being the ratio of the extension,
or contraction, of a bar to its original length.
7/12/12
A cylindrical block is 30 cm long and has a circular cross-section 10 cm in
diameter. It carries a total compressive load of 70 kN, and under this load it
contracts by 0.02 cm. Estimate the average compressive stress over a normal
cross-section and the compressive strain.
7/12/12
Stress-strai n curves for bri ttl e materi al s
Many of the characteristics of a material can be deduced from the tensile test.
In the experiment we measured the extensions of the wire for increasing loads; it is more
convenient to compare materials in terms of stresses and strains, rather than loads and
extensions of a particular specimen of a material.
The tensile stress-strain curve for a high-strength steel has the form shown. The stress at
any stage is the ratio of the load of the original cross-sectional area of the test specimen;
the strain is the elongation of a unit length of the test specimen.
For stresses up to about 750 MN/m2 the stress-
strain curve i s l i near, showing that the material
obeys Hooke s l aw in this range; the material is
also elastic in this range, and no permanent
extensions remain after removal of the stresses.
The ratio of stress to strain for this linear region is
usually about 200 GN/m2 for steels;
this ratio is known as Young s modul us and is
denoted by E.
Similarly, the strain at the limit of proportionality is
of the order 0.003, and is small compared with
strains of the order 0.100 at fracture.
7/12/12
We note that Youngs modulus has the units of a stress; the value of E defines the
constant in the linear relation between stress and strain in the elastic range of the
material.
We have, for the linear-elastic range.
If P is the total tensile load in a bar, A its cross-sectional area, and Lo its length,
e is the extension of the length Lo, then
Thus the expansion is given by
If the material is stressed beyond the linear-elastic range, the limit of proportionality is
exceeded, and the strains increase non-linearly with the stresses.
Moreover, removal of the stress leaves the
material with some permanent extension; this
range is then both non-linear and inelastic. The
maximum stress attained may be of the order of
1500 MN/m2, and the total extension, or
elongation, at this stage may be of the order of
10%.
When a material is stressed beyond the limit of
proportionality and is then unloaded,permanent
deformations of the material take place.
Unloading and reloading of a material in the inelastic range; the paths
bc and cd are approximately parallel to the linear-elastic line oa.
7/12/12
Suppose the tensile test-specimen is stressed beyond the limit of proportionality, in figure,
point a, to a point b on the stress-strain diagram. If the stress is now removed, the
stress-strain relation follows the curve bc ; when the stress is completely removed there
is a residual strain given by the intercept Oc on the -axis.
If the stress is applied again, the stress-strain relation follows the curve cd initially, and
finally the curve df to the breaking point.
Both the unloading curve bc and the reloading curve cd are approximately parallel to the
elastic line Oa; they are curved slightly in opposite directions.
The process of unloading and reloading, bcd, had little or no effect on the stress at the
breaking point, the stress-strain curve being interrupted by only a small amount bd.
The stress-strain curves of brittle materials for
tension and compression are usually similar in
form, although the stresses at the limit of
proportionality and at fracture may be very
different for the two loading conditions.
Typical tensile and compressive stress-strain
curves for concrete are shown in Figure; the
maximum stress attainable in tension is only
about one-tenth of that in compression,
although the slopes of the stress-strain curves
in the region of zero stress are nearly equal.
7/12/12
Ducti l e materi al s
A brittle material is one showing relatively little elongation at fracture in the tensile test;
but some materials, such as mild steel, copper, and synthetic polymers, may be stretched
appreciably before breaking. These latter materials are ductile in character.
If tensile and compressive tests are made on a mild steel, the resulting stress-strain
curves are different in form from those of a brittle material, such as a high-strength steel.
If a tensile test specimen of mild steel is loaded axially, the stress-strain curve is linear
and elastic up to a point a, refer figure 1.
(The smal l strai n regi on of Fi gure 1, i s reproduced to a l arger scal e i n Fi gure 2).
The ratio of stress to strain, or Youngs modulus, for the linear portion Oa is usually about
200 GN/m2, ie, 200 x109 N/m2.
The tensile stress at the point a is of order 300 MN/m2, i.e. 300 x 106 N/m2.
The stress for a tensile specimen attains a maximum value at d if the stress is evaluated
on the basis of the original cross-sectional area of the bar; the stress corresponding to
the point d is known as the ul ti mate stress, (ul t) of the material.
From d to f there is a reduction in the nominal stress until fracture occurs at f. The
ultimate stress in tension is attained at a stage when necking begins; this is a reduction of
area at a relatively weak cross-section of the test specimen.
7/12/12
Tensile stress-strain curve for
an annealed mild steel,
showing the drop in stress at
yielding from the upper yield
point a to the lower yield
point b.
Upper and lower yield points of a mild
steel.
7/12/12
If the test specimen is strained beyond the point a, figures 1 and 2, the stress must be
reduced almost immediately to maintain equilibrium.
The reduction of stress, ab, takes place rapidly, and the form of the curve ab is difficult
to define precisely.
Continued straining proceeds at a roughly constant stress along bc.
In the range of strains from a to c the material is said to yield;
Please note: a is the upper yield point, and b the lower yield point.
Yielding at constant stress along bc proceeds usually to a strain about 40 times greater
than that at a.
Beyond the point c the material strain-hardens, and stress again increases with strain
where the slope from c to d is about 1/50th that from 0 to a.
Compressive tests of mild steel give stress-strain curves similar to those for tension. If we
consider tensile stresses and strains as positive, and compressive stresses and strains as
negative, we can plot the tensile and compressive stress-strain curves on the same
diagram.
In determining the stress-strain curves experimentally, it is important to ensure that the
bar is loaded axially;
7/12/12
The figure shows the stress-strain curves for an
annealed mild steel. In the annealed condition
the yield stresses in tension and
Compression are approximately equal.
The lower yield point stress is taken usually as a more realistic definition of yielding of the
material. Some ductile materials show no clearly defined upper yield stress; for these
materials the limit of proportionality may be lower than the stress for continuous yielding.
The term yield stress refers to the stress for continuous yielding of a material; this implies
the lower yield stress for a material in which an upper yield point exists; the yield stress is
denoted by .
Tensile failures in steel specimens
showing necking in mild steel, (i)
and (iii), and brittle fracture in
high-strength steel, (ii).
7/12/12
Defi ni ti on of Stress
The concept of stress originated from the study of strength and failure of solids. The
stress field is the distribution of internal "tractions" that balance a given set of external
tractions and body forces. First, we look at the external traction T that represents the
force per unit area acting at a given location on the body's surface. Traction T is a bound
vector, which means T cannot slide along its line of action or translate to another location
and keep the same meaning.
In other words, a traction vector cannot be fully described unless both the force and the
surface where the force acts on has been specified. Given both F and s, the traction T
can be defined as
7/12/12
The internal traction within a solid, or stress, can be defined in a similar manner. Suppose
an arbitrary slice is made across the solid shown in the above figure, leading to the free
body diagram shown at right. Surface tractions would appear on the exposed surface,
similar in form to the external tractions applied to the body's exterior surface. The stress
at point P can be defined using the same equation as was used for T.
Stress therefore can be interpreted as internal tractions that act on a defined internal
datum plane. One cannot measure the stress without first specifying the datum plane.
Surface tractions, or stresses acting on an
internal datum plane, are typically
decomposed into three mutually
orthogonal components.
One component is normal to the surface
and represents di rect stress. The other
two components are tangential to the
surface and represent shear stresses.
What is the distinction between normal and
tangential tractions, or equivalently, direct
and shear stresses?
The Stress Tensor (or Stress
Matri x)
7/12/12
7/12/12
Di rect stresses tend to change the volume of the material (e.g. hydrostatic pressure)
and are resisted by the body's bulk modulus (which depends on the Young's modulus and
Poisson ratio). Shear stresses tend to deform the material without changing its volume,
and are resisted by the body's shear modulus.
For example, the stress state at point P can be
represented by an infinitesimal cube with three
stress components on each of its six sides
(one direct and two shear components).
Since each point in the body is under static
equilibrium (no net force in the absence of any
body forces), only nine stress components from
three planes are needed to describe the
stress state at a point P.
These nine components can be
Organised into the matrix:
where shear stresses across the diagonal are identical (i.e. xy = yx, yz = zy, and
zx = xz) as a result of static equilibrium (no net moment). This grouping of the nine
stress components is known as the stress tensor (or stress matrix).
The subscript notation used for the
nine stress components have the
following meaning:
7/12/12
Note: The stress state is a second order tensor since it is a quantity associated with
two directions. As a result, stress components have 2 subscripts.
A surface traction is a fi rst order tensor (i.e. vector) since it a quantity associated with
only one direction. Vector components therefore require only 1 subscript.
Mass would be an example of a zero-order tensor (i.e. scalars), which have no
relationships with directions (and no subscripts).
Consider the static equilibrium of a solid subjected to the body force vector field b.
Applying Newton's first law of motion results in the following set of differential equations
which govern the stress distribution within the solid,
In the case of two dimensional stress, the above equations reduce to,
7/12/12
7/12/12
7/12/12
7/12/12
Consider a rod with initial length L which is stretched to a
length L'. The strain measure , a dimensionless ratio, is
defined as the ratio of elongation with respect to the original
length,
Gl obal 1D
Strai n
Consider an arbitrary point in the bar P, which has a
position vector x, and its infinitesimal neighbour dx.
Point P shifts to P' , which has a position vector x' ,
after the stretch. In the meantime, the small "step" dx
is stretched to dx' .
The strain at point p can be defined
Since the displacement ,
the strain can hence be rewritten as,
Infi ni tesi mal 1D
Strai n
The above strain measure is defined in a global sense. The
strain at each point may vary dramatically if the bar's elastic
modulus or cross-sectional area changes.
7/12/12
There are a total of 6
strain measures which
can be organised into
a matrix.
3D Strai n
Matri x
Engi neeri ng Shear
Strai n
Focus on the strain xy for a moment. The expression inside the parentheses can be
rewritten as, where called the
engi neeri ng shear strai n, xy is a total measure of shear strain in the x-y plane.
In contrast, the shear strain xy is the average of the shear strain on the x face along the
y direction, and on the y face along the x direction.
Engineering shear strain is commonly used in engineering reference books. However, please
beware of the difference between shear strain and engineering shear strain, so as to avoid errors
in mathematical manipulations.
7/12/12
In the strain-displacement relationships, there are six strain measures but only three
independent displacements. That is, there are 6 unknowns for only 3 independent
variables. As a result there exist 3 constraint, or compatibility, equations. These
compatibility conditions for infinitesimal strain referred to rectangular Cartesian
coordinates are,
In two dimensional problems (e.g. plane strain), all z terms are set to zero. The
compatibility equations reduce to,
Note that some references use engineering shear strain ( ) when
referencing compatibility equations.
Compati bi l i ty Condi ti ons
7/12/12
General Definition of 3D Strain
As in the one dimensional strain
derivation, suppose that point P in a
body shifts to point P after deformation.
The infinitesimal strain-displacement
relationships can be summarised as,
where u is the displacement vector,
x is coordinate, and the two indices i
and j can range over the three
coordinates {1, 2, 3} in three
dimensional space.
Expanding the above equation for each
coordinate direction gives,
where u, v, and w are the displacements in
the x, y, and z directions respectively
(i.e. they are the components of u).
7/12/12
Bul k El asti c Properti es
The bulk elastic properties of a material determine how much it will compress under a
given amount of external pressure. The ratio of the change in pressure to the fractional
volume compression is called the bul k modul us of the materi al .
A representative value for the bulk modulus for steel is and that for water is
The reciprocal of the bulk modulus is called the compressi bi l i ty of the substance. The
amount of compression of solids and liquids is seen to be very small.
The bulk modulus of a solid influences the speed
of sound and other mechanical waves in the
material. It also is a factor in the amount of
energy stored in solid material.
A common statement is that water is an incompressible fluid.
This is not strictly true, as indicated by its finite bulk modulus,
but the amount of compression is very small.
At the bottom of the Pacific Ocean at a depth of about 4000
meters, the pressure is about 4 x 107 N/m2. Even under this
enormous pressure, the fractional volume compression is only
about 1.8% and that for steel would be only about 0.025%.
So it is fair to say that water is nearly incompressible.
7/12/12
Young' s Modul us
In solid mechanics, Young' s modul us (E) is a measure of the stiffness of an isotropic
elastic material. It is also known as the Young modul us, modul us of el asti ci ty,
el asti c modul us (though Young's modulus is actually one of several elastic moduli such as the bul k
modul us and the shear modul us) or tensi l e modul us.
It is defined as the ratio of the uni-axial stress over the uni-axial strain in the range of
stress in which Hooke' s Law holds.
Young's modulus is named after Thomas Young, the 18th century British scientist. However, the concept was
developed in 1727 by Leonhard Euler.
For the description of the elastic properties of linear objects like wires, rods, columns
which are either stretched or compressed, a convenient parameter is the rati o of the
stress to the strai n, or Young' s modul us of the material. Young's modulus can be
used to predict the elongation or compression of an object as long as the stress is less
than the yield strength of the material.
This can be experimentally determined from the slope of a stress-strain curve created during tensile tests
conducted on a sample of the material.
Material
Densit
y
(kg/m3
)
Young's
Modulus
109
N/m2
Ultimate
Strength
Su
106
N/m2
Yield
Strength
Sy
106
N/m2
Steela 7860 200 400 250
Aluminum 2710 70 110 95
a Structural steel
7/12/12
shear modul us or modul us of ri gi di ty, denoted by G, or sometimes S or , is defined as the
ratio of shear stress to the shear strain:
Where = shear stress;
F is the force which acts and
A is the area on which the force acts
= shear strain;
x is the transverse displacement ,
I is the initial length
Shear modulus is usually measured in GPa (giga pascal)
The shear modulus is concerned with the deformation of a solid when it experiences a force
parallel to one of its surfaces while its opposite face experiences an opposing force (such as
friction). In the case of an object that's shaped like a rectangular prism, it will deform into a
parallelepiped.
Anisotropic materials such as wood and paper exhibit differing material response to stress or strain
when tested in different directions. In this case, when the deformation is small enough so that the
deformation is linear, the elastic moduli, including the shear modulus, will then be a tensor, rather
than a single scalar value. In homogeneous and isotropic solids, there are two kinds of waves, pressure waves and shear
waves. The velocity of a shear wave, (vs) is controlled by the shear modulus,
where
G is the shear modulus
is the solid's density.
shear modul us describes the material's response to shearing strains.
7/12/12
Hooke' s l aw
Hooke's law is named after the 17th century British physicist Robert Hooke.
He first stated this law in 1676 as a Latin anagram, whose solution he published in 1678 as Ut tensi o, si c vi s,
meaning: As the extension, so the force.
Objects that quickly regain their original shape after being deformed by a force, with the
molecules or atoms of their material returning to the initial state of stable equilibrium,
often obey Hooke's law. We may view a rod of any elastic material as a linear spring. The
rod has length L and cross-sectional area A. Its extension (strain) is linearly proportional
to its tensile stress by a constant factor, the inverse of its modulus of elasticity E,
hence, or
Hooke's law only holds for some materials under certain loading conditions. Steel exhibits linear-elastic behavior
in most engineering applications; Hooke's law is valid for it throughout its el asti c range (i.e., for stresses below
the yield strength). For some other materials, such as aluminium, Hooke's law is only valid for a portion of the
elastic range. For these materials a proportional limit stress is defined, below which the errors associated with the
linear approximation are negligible.
For systems that obey Hooke's law, the extension produced is directly proportional to the
load: where:
is the distance that the spring has been stretched or compressed away from the equilibrium
position, (meters),
is the restoring force exerted by the material (Newtons), and
is the force constant (or spri ng constant). The constant has units of force per unit length
(newtons per meter). When this holds, we say that the behavior is linear.
negative sign on the right hand side of the equation because the restoring force always acts in the opposite
direction of the x displacement.
7/12/12
Poi sson' s rati o ( ), named after Simeon Poisson, is the rati o of the rel ati ve contracti on
strai n, or transverse strai n (normal to the appl i ed l oad), to the rel ati ve extensi on
strai n, or axi al strai n (i n the di recti on of the appl i ed l oad).
When a sample of material is stretched in one direction,
it tends to contract (or rarely, expand) in the other two directions.
Conversely, when a sample of material is compressed in one direction,
it tends to expand (or rarely, contract) in the other two directions.
Poi sson' s rati o ( ) i s a measure of thi s tendency.
The Poisson's ratio of a stable material cannot be
less than 1.0 nor greater than 0.5 due to the
requirement that the elastic modulus,
the shear modulus and bulk modulus
have positive values.
Assuming that the material is compressed along the axial direction:
where, is the resulting Poisson's ratio,
is transverse strain (negative for axial tension, positive for axial compression)
is axial strain (positive for axial tension, negative for axial compression).
On the molecular level, Poissons effect is caused by slight movements between molecules and the stretching of
molecular bonds within the material lattice to accommodate the stress. When the bonds elongate in the stress
direction, they shorten in the other directions. This behavior multiplied millions of times throughout the material
lattice is what drives the phenomenon.
Most materials have between 0.0 and 0.5. Cork is close to 0.0, showing almost no Poisson contraction, most
steels are around 0.3, and rubber is nearly incompressible and so has a Poisson ratio of nearly 0.5. A perfectly
incompressible material deformed elastically at small strains would have a Poisson's ratio of exactly 0.5. Some
materials, mostly polymer foams, have a negative Poisson's ratio; if these auxeti c materials are stretched in one
direction, they become thicker in perpendicular directions.
7/12/12
Generalised Hooke's law : For an isotropic material, the deformation of a material in the
direction of one axis will produce a deformation of the material along the other axes in three
dimensions. Thus it is possible to generalise Hooke's Law into three dimensions:
Where , and are strain in the direction of x, y and z axis
x , y and z are stress in the direction of x, y and z axis
E is Young's modulus (the same in all directions: x, y and z for isotropic materials)
is Poisson's ratio (the same in all directions: x, y and z for isotropic materials)
Vol umetri c change: The relative change of volume V /V due to the stretch of the
material can be calculated using a simplified formula (only for small deformations):
Where V is material volume
V is material volume change
L is original length, before stretch
L is the change of length: L = Lnew Lold
If a rod with diameter (or width, or thickness) d and length L is subject to tension so that its length will change
by L then its diameter d will change by (the value is negative, because the diameter will decrease with
increasing length):
The above formula is true only in the case of small deformations; if deformations are large then the following
(more precise) formula can be used
For Orthotropic material, such as wood in which Poisson's ratio is different in each direction (x, y and z axis) the
relation between Young's modulus and Poisson's ratio is described as
Ei is a Young's modulus along axis i and jk is a Poisson's ratio in plane jk
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
A 2.5 cm diameter steel bolt passes through a steel tube 5 cm internal diameter, 6.25cm external
diameter, and 40 cm long. The bolt is then tightened up onto the tube through rigid end blocks
until the tensile force in the bolts is 40 kN. The distance between the head of the bolt and the nut
is 50 cm. If an external force of 30 kN is applied to the end blocks, tending to pull them apart,
estimate the resulting tensile force in the bolt.
7/12/12
A cylindrical block is 30 cm long and has a circular cross-section 10 cm in
diameter. It carries a total compressive load of 70 kN, and under this load it
contracts by 0.02 cm. Estimate the average compressive stress over a normal
cross-section and the compressive strain.
7/12/12
The pressure on the back of the piston acts
on a net area
The load on the piston is then
Area of the piston rod is
The average tensile stress in the rod is then
From equation , the elongation of a length
of 1 m is,
7/12/12
The cross-sectional area is
The tensile stress is then
The measured tensile strain is
Then Youngs modulus is defined by
7/12/12
1.4
7/12/12
7/12/12
7/12/12
a
)
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Composi te bars i n tensi on or compressi on
A composite bar is one made of two materials, such as steel rods embedded in concrete. The
construction of the bar is such that constituent components extend or contract equally under load.
To illustrate the behaviour of such bars consider a rod made of two materials, 1 and 2, Figure ;
A1, A2, are the cross-sectional areas of the bars, and E1, E2 are the values of Young's modulus.
We imagine the bars to be rigidly connected together at the ends; then for compati bi l i ty, the
longitudinal strains to be the same when the composite bar is stretched
we must have
7/12/12
Stati cal l y Determi nate Structures:
Figure shows a rigid beam BD supported by two vertical wires BF and
DG; the beam carries a force of 4W at C. We suppose the wires extend by
negligibly small amounts, so that the geometrical configuration of the
structure is practically unaffected; then for equilibrium the forces in the
wires must be 3 W in BF and W in DG. As the forces in the wires are
known, it is a simple matter to calculate their extensions and hence to
determine the displacement of any point of the beam.
The calculation of the forces in the wires and structure of Figure is said to
be stati cal l y determi nate.
If, however, the rigid beam be supported by three wires,
with an additional wire, say, between H and J, then
the forces in the three wires cannot be solved by
considering statical equilibrium alone;
such a structure is stati cal l y i ndetermi nate.
If the frame has just sufficient bars or rods to prevent collapse without the application of external
forces, it is said to be si mpl y-sti ff, when there are more bars or rods than this, the frame is said
to be redundant.
If m be the total number of members and j is the total number of
joints, we must have m = 2j 3, if the frame is to be simply-
stiff or statically determinate.
7/12/12
A type of stress analysis problem in which internal stresses are not calculable on considering
statical equilibrium alone; such problems are statically indeterminate. Consider the rigid beam BD
of Figure which is supported on three wires; suppose the tensions in the wires are T1 , T2 and
T3. Then by resolving forces vertically, we have T 1 + T 2 + T 3 = 4W .. (1)
and by taking moments about the point C, T 1 T 2 3 T 3 = 0 .. (2)
From these equilibrium equations alone we cannot derive the values of the three tensile forces;
a third equation is found by discussing the extensions of the wires or considering compatibility.
If the wires extend by amounts e 1 , e 2 , e 3 we must have from Figure (ii) that
e 1 + e 3 = 2e 2 . (3) because the beam BD is rigid.
Suppose the wires are all of the same material and
cross-sectional area, and that they remain elastic.
Then we may write , , .
Where is a constant common to the three wires.
Then equation (3) becomes T 1 + T 3 = 2 T 2 .. (4)
The three equations (1), (2) and (4) then give
Equation (3) is a condition which the extensions of the wires must satisfy.
It is called a strai n compati bi l i ty condi ti on.
Statically indeterminate problems are soluble if strai n compati bi l i ti es are consi dered as wel l as stati cal
equi l i bri um.
Stati cal l y Indetermi nate Structures:
7/12/12
Temperature stresses
Temperature stresses i n composi te bars:
Suppose the bar and tube are quite free of each other;
if Lo is the original length of each bar, the extensions
due to a temperature increase
Difference in lengths of the two members is
Refer Figure (iii),this is now eliminated by compressing
the inner bar with a force P, and pulling the outer tube
with an equal force P.
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Di rect stresses tend to change the volume of the material (e.g.
hydrostatic pressure) and are resisted by the body's bulk modulus
(which depends on the Young's modulus and Poisson ratio).
Shear stresses tend to deform the material without changing its
volume, and are resisted by the body's shear modulus.
Defining a set of internal datum planes aligned with a Cartesian
coordinate system allows the stress state at an internal point P to
be described relative to x, y, and z coordinate directions.
The subscript notation used for the nine stress components have the
following meaning:
For example, the stress state at point P can be represented by an infinitesimal cube with three
stress components on each of its six sides (one direct and two shear components).
Since each point in the body is under static equilibrium (no net force in the absence of any body
forces), only nine stress components from three planes are needed to describe the stress state at a
point P. These nine components can be organised into the matrix:
where shear stresses across the diagonal are identical
(i.e. xy = yx , yz = zy and zx = xz)
as a result of static equilibrium (no net moment).
This grouping of the nine stress components is known as
the stress tensor (or stress matrix).
7/12/12
Consider the static equilibrium of a solid subjected to the body force vector field b.
Applying Newton's first law of motion results in the following set of differential equations
which govern the stress distribution within the solid,
In the case of two dimensional stress, the above equations reduce to,
Equati ons of
Equi l i bri um
Note: The stress state is a second order tensor since it is a quantity associated with two directions.
As a result, stress components have 2 subscripts.
A surface traction is a first order tensor (i.e. vector) since it is a quantity associated with only one
direction. Vector components therefore require only 1 subscript.
Mass would be an example of a zero-order tensor (i.e. scalars), which have no relationships with
directions (and no subscripts).
7/12/12
PLANE STATE of STRESS
Common engineering problems involving stresses in a thin plate or on the free surface of
a structural element, such as the surfaces of thin-walled pressure vessels under external
or internal pressure, the free surfaces of shafts in torsion and beams under transverse
load, have one principal stress that is much smaller than the other two.
By assuming that this small principal stress is zero, the three-dimensional stress state can
be reduced to two dimensions. Since the remaining two principal stresses lie in a plane,
these simplified 2D problems are called pl ane stress problems.
Assume that the negligible principal stress
is oriented in the z-direction. To reduce the
3D stress matrix to the 2D plane stress matrix,
remove all components with z subscripts to get,
Where xy = yx for static equilibrium.
The sign convention for positive stress components
in plane stress is illustrated in the above figure on the 2D element.
7/12/12
7/12/12
7/12/12
7/12/12
The normal stresses (x' and y') and the shear stress (x'y') vary smoothly with respect
to the rotation angle , in accordance with the coordinate transformation equations. There
exist a couple of particular angles where the stresses take on special values. First, there
exists an angle p where the shear stress x' y' becomes zero. That angle is found by
setting x' y' to zero in the above shear transformation equation and solving for (set
equal to p). The result is,
The angle p defines the principal directions where the only stresses are normal stresses.
These stresses are called principal stresses and are found from the original stresses
(expressed in the x,y,z directions) via,
Pri nci pal Di recti ons, Pri nci pal Stress
7/12/12
Coordinate Transformations
The coordinate directions chosen to analyse a structure are usually based on the shape of
the structure. As a result, the direct and shear stress components are associated with
these directions. For example, to analyse a bar one almost always directs one of the coordinate directions
along the bar's axis.
Stresses in directions that do not line up with the original coordinate set are also
important. For example, the failure plane of a brittle shaft under torsion is often at a 45 angle with respect to
the shaft's axis. Stress transformation formulas are required to analyse these stresses.
The transformation of stresses with respect to the {x,y,z}
coordinates to the stresses with respect to {x',y',z'}
is performed via the equations, where is the rotation
angle between the two coordinate sets
(positive in the counterclockwise direction).
7/12/12
The transformation to the principal directions can be illustrated as:
7/12/12
Maxi mum Shear Stress
Di recti on Another important angle s is where the maximum shear stress occurs. This is found by finding
the maximum of the shear stress transformation equation, and solving for . The result is,
The maximum shear stress is equal to one-half the difference between the two principal stresses,
The transformation to the maximum shear stress direction can be illustrated as:
7/12/12
Mohr's Circle
Introduced by Otto Mohr in 1882, Mohr's Circle illustrates principal stresses and stress
transformations via a graphical format,
The two principal stresses are shown in red, and the maximum shear stress is shown in orange.
Recall that the normal stresses equal the principal stresses when the stress element is aligned with
the principal directions, and the shear stress equals the maximum shear stress when the stress
element is rotated 45 away from the principal directions.
As the stress element is rotated away from the principal (or maximum shear) directions, the normal
and shear stress components will always lie on Mohr's Circle.
7/12/12
Deri vati on of Mohr' s
Ci rcl e
To establish Mohr's Circle, we first recall the stress transformation formulas for plane
stress at a given location,
Using a basic trigonometric relation (cos2 2 + sin2 2 = 1) to combine the two above
equations we have,
This is the equation of a circle, plotted on a graph where the abscissa is the normal stress
and the ordinate is the shear stress. This is easier to see if we interpret x and y as
being the two principal stresses, and xy as being the maximum shear stress. Then we
can define the average stress, avg and a "radius" R (which is just equal to the
maximum shear stress),
7/12/12
The circle equation above now takes on a more familiar form,
The circle is centered at the average stress value, and has a radius R equal to
the maximum shear stress, as shown in the figure below,
7/12/12
Pri nci pal Stresses from Mohr' s Ci rcl e
A chief benefit of Mohr's circle is that the principal stresses 1 and 2 and the maximum
shear stress max are obtained immediately after drawing the circle,
where,
7/12/12
Pri nci pal Di recti ons from Mohr' s Ci rcl e
Mohr's Circle can be used to find the directions of the principal axes. To show this, first
suppose that the normal and shear stresses, x , y and xy are obtained at a given point
O in the body. They are expressed relative to the coordinates XY, as shown in the stress
element at right below.
The Mohr's Circle for this general stress state is shown at left above. Note that it's
centered at avg and has a radius R, and that the two points {x , txy} and {y , -txy} lie
on opposites sides of the circle. The line connecting x and y will be defined as Lxy.
7/12/12
The angl e between the current axes (X and Y) and the pri nci pal axes is defined as p
and is equal to one half the angle between the line Lxy and the -axis as shown in the
schematic below,
Rotati on Angl e on Mohr' s Ci rcl e
Note that the coordinate rotation angle p is defined positive when starting at the XY coordinates
and proceeding to the XpYp coordinates. In contrast, on the Mohr's Circle p is defined positive
starting on the principal stress line (i.e. the -axis) and proceeding to the XY stress line (i.e. line
Lxy). The angle p has the opposite sense between the two figures, because on one it starts on
the XY coordinates, and on the other it starts on the principal coordinates.
7/12/12
The principal axes are counterclockwise
to the current axes (because xy > 0)
and no more than 45 away
(because x > y).
Case 1: xy > 0 and x >
y
Case 2: xy < 0 and x
> y
The principal axes are clockwise to the
current axes (because xy < 0)
and no more than 45 away
(because x > y)
A set of six Mohr's Circles representing most stress state possibilities are presented
7/12/12
Case 3: xy > 0 and x <
y
The principal axes are counterclockwise
to the current axes (because xy > 0)
and between 45 and 90 away.
(because x < y)
Case 4: xy < 0 and x <
y
The principal axes are clockwise to the
current axes (because xy < 0) and
between 45 and 90 away.
(because x < y)
7/12/12
Case 5: xy = 0 and x
> y
The principal axes are aligned with
the current axes.
(because x > y and xy = 0).
Case 6: xy = 0 and x
< y
The principal axes are exactly 90 from
the current axes
(because x < y and xy = 0).
7/12/12
Stress Transform by Mohr' s
Ci rcl e
Mohr's Circle can be used to transform stresses from one coordinate set to another,
similar to that described on the plane stress . Suppose that the normal and shear stresses,
x , y and xy, are obtained at a point O in the body, expressed with respect to the
coordinates XY. We wish to find the stresses expressed in the new coordinate set X'Y',
rotated an angle q from XY, as shown below:
Plane
Stress
7/12/12
To do this we proceed as follows:
Step 1: Draw Mohr's circle for the gi ven stress state ( x , y and xy).
Step 2: Draw the line Lxy across the circle from (x , xy) to (y , - xy).
Step 3: Rotate the line Lxy by 2* (twice as much as the angle between XY and X'Y')
and in the opposite direction of .
Step 4: The stresses i n the new coordi nates (x' , y' and x'y ) are then read
off the circle.
7/12/12
Mohr' s Ci rcl e For PLANE
STRAIN
Strains at a point in the body can be illustrated by Mohr's Circle. The idea and procedures
are exactly the same as for Mohr's Circle for plane stress.
The two principal strains are shown in red, and the maximum shear strain is shown in
orange. Recall that the normal strains are equal to the principal strains when the element
is aligned with the principal directions, and the shear strain is equal to the maximum
shear strain when the element is rotated 45 away from the principal directions.
As the element is rotated away from the principal (or maximum strain) directions, the
normal and shear strain components will always lie on Mohr's Circle.
7/12/12
To establish the Mohr's circle, we first recall the strain transformation formulas for plane
strain,
Deri vati on of Mohr' s
Ci rcl e
Using a basic trigonometric relation (cos22+ sin22 = 1) to combine the above two
formulas we have,
This equation is an equation for a circle. To make this more apparent, we can
rewrite it as,
where,
The circle is centered at the average strain value
Avg and has a radius R equal to the maximum
shear strain, as shown in the figure.
7/12/12
Pri nci pal Strai ns from Mohr' s Ci rcl e
A chief benefit of Mohr's circle is that the principal strains 1 and 2 and the maximum
shear strain xyMax are obtained immediately after drawing the circle,
where,
7/12/12
Mohr's Circle can be used to find the directions of the principal axes. To show this, first
suppose that the normal and shear strains, x , y and xy are obtained at a given point
O in the body. They are expressed relative to the coordinates XY, as shown in the strain
element at right below.
Pri nci pal Di recti ons from Mohr' s Ci rcl e
The Mohr's Circle for this general strain state is shown at left above. Note that it's
centered at Avg and has a radius R, and that the two points (x , xy) and (y , - xy)
lie on opposites sides of the circle. The line connecting x and y will be defined as Lxy.
7/12/12
The angl e between the current axes (X and Y) and the pri nci pal axes is defined as p
and is equal to one half the angle between the line Lxy and the -axis as shown
Note that the coordinate rotation angle p is defined positive when starting at the XY coordinates
and proceeding to the XpYp coordinates. In contrast, on the Mohr's Circle p is defined positive
starting on the principal strain line (i.e. the -axis) and proceeding to the XY strain line (i.e. line
Lxy). The angle p has the opposite sense between the two figures, because on one it starts on
the XY coordinates, and on the other it starts on the principal coordinates.
Rotati on Angl e on Mohr' s
Ci rcl e
7/12/12
Strai n Transform by Mohr' s
Ci rcl e
Mohr's Circle can be used to transform strains from one coordinate set to another, similar
that that described on the plane strain page. Suppose that the normal and shear strains,
x , y and xy are obtained at a point O in the body, expressed with respect to the
coordinates XY. We wish to find the strains expressed in the new coordinate set X'Y',
rotated an angle from XY, as shown below:
7/12/12
To do this we proceed as follows:
Step 1: Draw Mohr's circle for the gi ven strai n state (x , y and xy shown below).
Step 2: Draw the line Lxy across the circle from (x, xy) to (y, - xy).
Step 3: Rotate the line Lxy by 2* (twice as much as the angle between XY and X'Y') and
in the opposite direction of .
Step 4: The strai ns i n the new coordi nates (x' , y' and x'y ) are then read.
7/12/12
Case 1: xy > 0 and x
> y
The principal axes are counterclockwise to the
current axes (because xy > 0) and
no more than 45 away
(because x > y).
Case 2: xy < 0 and x
> y
The principal axes are clockwise to the
current axes (because xy < 0) and
no more than 45 away
(because x > y).
7/12/12
Case 3: xy > 0 and x
< y
The principal axes are counterclockwise to the
current axes (because xy > 0) and between
45 and 90 away (because x < y).
Case 4: xy < 0 and x <
y
The principal axes are clockwise to the
current axes (because xy < 0)
and between 45 and 90 away
(because x < y).
7/12/12
Case 5: xy = 0 and x
> y
The principal axes are aligned with
the current axes
(because x > y and xy = 0).
Case 6: xy = 0 and x
< y
The principal axes are exactly 90
from the current axes
(because x < y and xy = 0).
7/12/12
One-di mensi onal Hooke' s Law : Robert Hooke, who in 1676 stated
General i sed Hooke' s Law (Ani sotropi c Form)
Cauchy generalised Hooke's law to three dimensional elastic bodies and stated that the 6
components of stress are linearly related to the 6 components of strain. The stress-strain
relationship written in matrix form, where the 6 components of stress and strain are organised into
column vectors, is,
ie., = S
The power (sic.) of any springy body is in the same proportion with the extension.
announced the birth of elasticity. Hooke's statement expressed mathematically ,
where F is the applied force (and not the power, as Hooke mistakenly suggested), u is the
deformation of the elastic body subjected to the force F, and k is the spring constant (i.e. the ratio
of previous two parameters).
or
ie., =
C
where, C is the compliance matrix, S is the stiffness matrix and S = C-1.
7/12/12
Orthotropi c
Defi ni ti on
Some engineering materials, including certain piezoelectric materials (e.g. Rochelle salt)
and 2-ply fiber-reinforced composites, are orthotropi c.
By definition, an orthotropic material has at least 2 orthogonal planes of symmetry, where
material properties are independent of direction within each plane. Such materials require
9 independent variables (i.e. elastic constants) in their constitutive matrices.
In contrast, a material without any planes of symmetry is fully anisotropic and requires 21
elastic constants, whereas a material with an infinite number of symmetry planes (i.e.
every plane is a plane of symmetry) is isotropic, and requires only 2 elastic constants.
Hooke' s Law i n Compl i ance
Form
By convention, the 9 elastic constants in orthotropic constitutive equations are comprised
of 3 Young's moduli Ex , Ey , Ez , the 3 Poisson's ratios yz , zx , xy and the 3
shear moduli Gyz , Gzx , Gxy
The shear modulus G is related to E and
7/12/12
A wire strain gage can effectively measure strain in only one direction. To determine the
three independent components of plane strain, three linearly independent strain measures
are needed, i.e., three strain gages positioned in a rosette-like layout.
Consider a strain rosette attached on the surface with an angle from the x-axis. The
rosette itself contains three strain gages with the internal angles and , as illustrated.
Suppose that the strain measured from these
three strain gages are a , b and c respectively.
The following coordinate transformation equation
is used to convert the longitudinal strain from each
strain gage into strain expressed in the x-y coordinates,
Applying this equation to each of the three strain gages
results in the following system of equations,
Strai n Rosette for Strai n Measurement
These equations are then used to
solve for the three unknowns, x, y,
and xy.
7/12/12
Note: 1. The above formulas use the strain measure xy as opposed to the engineering shear
strain xy . .To use xy, the above equations should be adjusted
accordingly.
2. The free surface on which the strain rosette is attached is actually in a state of plane stress,
while the formulas used above are for plane strain. However, the normal direction of the free
surface is indeed a principal axis for strain. Therefore, the strain transform in the free surface plane
can be applied.
Special Cases of Strain Rosette Layouts
Case 1: 45 strain rosette aligned with
the x-y axes, i.e., = 0, = = 45.
Case 2: 60 strain rosette, the middle
of which is aligned with the y-axis,
i.e., = 30, = = 60.
7/12/12
The strain gage is one of the most widely used strain measurement sensors. It is a
resistive elastic unit whose change in resistance is a function of applied strain.
where R is the resistance, is the strain, and S is the strain sensitivity factor of the gage
material (also called as gage factor).
Among strain gages, an electric resistance wire strain gage has the
advantages of lower cost and being an established product.
Thus it is the most commonly used type of device.
Other types of strain gages are acoustic, capacitive, inductive, mechanical, optical, piezo-resistive, and semi-
conductive.
A wire strain gage is made by a resistor, usually in metal foil form, bonded on an elastic
backing.
Its principle is based on fact that the resistance of a wire increases with increasing strain and decreases with
decreasing strain, as first reported by Lord Kelvin in 1856.
Consider a wire strain gage, as illustrated above. The wire is composed of a uniform
conductor of electric resistivity r with length l and cross-section area A. Its resistance R is
a function of the geometry given by
Electric Resistance Strain Gages
7/12/12
The resistance change rate is a combination effect of changes in length, cross-section
area, and resistivity.
When the strain gage is attached and bonded well to the surface of an object, the two are
considered to deform together.
The strai n of the strai n gage wi re al ong the l ongi tudi nal di recti on i s the
same as the strai n on the surface i n the same di recti on.
However, its cross-sectional area will also change due to the Poisson's ratio. Suppose that
the wire is cylindrical with initial radius r, the normal strain along the radial direction is
The change rate of cross-section area is twice as the radial strain, when the strain is
small.
7/12/12
The resistance change rate becomes
For a given material, the sensitivity of resistance versus strain can be calibrated by the
following equation.
When the sensitivity factor S is given, (usually provided by strain gage vendors) the
average strain at the point of attachment of the strain gage can be obtained by measuring
the change in electric resistance of the strain gage.
Since most metal materials have the Poisson's ratio around 0.25 to 0.35, the (1 + 2 ) term in the
strain sensitivity factor S is expected to be 1.5 to 1.7.
However, the strain sensitivity factor S itself ranges from -12.1 in Nickel up to 6.1 in Platinum.
This wide variation indicates that the change in electric resistivity r , the so called piezo-resistance
effect, can be quite large in some materials.
Click to edit Master subtitle style
7/12/12
UNIT 3
Distribution of Bending Stress and
Shear Stress in a cross section of Beams
SFD and BMD for propped cantilever,
built-in beams, continuous beams.
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
Beams:
Consider first the simple case of a beam which is fixed rigidly at one end B and is quite free at
its remote end D, Figure 1 ; such a beam is called a canti l ever. Imagine that the cantilever is
horizontal, with one end B embedded in a wall, and that a lateral force W is applied at the free end
D. Suppose the cantilever is divided into two lengths by an imaginary section C; the lengths BC
and CD must individually be in a state of stati cal equi l i bri um. If we neglect the mass of the
cantilever itself, the loading actions over the section C of CD balance the actions of the force W at
C. The length CD of the cantilever is in equilibrium if we apply an upwards vertical force F and an
anti-clockwise couple M at C; F is equal in magnitude to W, and M is equal to W(L - z), where z
is measured from B. The force F at C is called a sheari ng force, and the couple M is a bendi ng
moment. But at the imaginary section C of the cantilever, the actions F and M on CD are
provided by the length BC of the cantilever. In fact, equal and opposite actions F and M are
applied by CD to BC. For the length BC, the actions at C are a downwards shearing force F, and a
clockwise couple M.
7/12/12
When the cantilever carries external loads which are not applied
normally to the axis of the beam, Figure 2, axial forces are set up in
the beam. If W is inclined at an angle to the axis of the beam the
axial thrust in the beam at any section is
The bending moment and shearing force at a section a distance z
from the built-in end are
Rel ati on between the i ntensi ty of l oadi ng, SF and BM:
Consider a straight beam under any system of lateral loads and
external couples, Figure 3; an element length z of the beam at a
distance z from one end is acted upon by an external lateral load,
and internal bending moments and shearing forces.
Suppose external lateral loads are distributed so that the intensity
of loading on the elemental length z is w.
7/12/12
Then the external vertical force on the element is w z ; this is reacted by an internal bending
moment M and shearing force F on one face of the element, and M + M and F + F on
the other face of the element.
For vertical equilibrium of the element we have,
If z is infinitesimally small,
Suppose this relation is integrated between the limits z1 and z2 then
If F1 and F2 are the shearing forces at z = z1 and z = z2 respectively, then
Furthermore, for rotational equilibrium of
the elemental length z,
neglecting higher orders Then, in the limit as z approaches
zero,
On integrating between the limits z = z1 and z2 we have
Thus
The shearing force F at a section distance z from one end of the beam is
On substituting this value of F into equation,
From equations & we have that the bending moment M has a stationary
value when the shearing force F is zero. Thus, we get
All the relations developed in this section are merely statements of statical equilibrium,
and are therefore true independently of the state of the material of the beam.
7/12/12
7/12/12
Basi c Cal cul us Concepts
This is a very basic review of introductory Calculus concepts. We first look at a quadratic function:
y = 9 x2 - 50 x + 50, which is graphed in Diagram 2.
This function has a slope at every point. If we take the "derivative" of our quadratic function, we
obtain a new function (y' = 18 x - 50), which is graphed in Diagram 1.
The 'derivative' function gives us the value of the slope of our quadratic function at every
point. (Thus at x = 2, the slope of the quadratic function is 18 * 2 - 50 = -14)
7/12/12
If on the other hand we "integrate" our quadratic function, we obtain a new function
(y* = 3 x3 - 25 x2 + 50 x), which is graphed in Diagram 3 directly below Diagram 1.
The 'integrated' function tells us the net area under the quadratic function curve (between
the function curve and the x axis). It actually tells us the area between some beginning x-
value and ending x-value (when we do what is called a definite integral).
For the integrated function above, the initial x value is zero and the ending x-value is what ever
value we choose. That is for x = 2, the area under the quadratic function curve between zero
and 2 is: A = 3 (2)3 -25 (2)2 + 50 (2) = 24.
Thus every y value on the curve
in Diagram 3 is equal to the
sum of the area under the curve
in Diagram 2 up to that point.
7/12/12
We can also do an "indefinite" integral which results in 'integrated' function involving a
constant - which is evaluated by applying a boundary condition.
Let us review some basic derivatives
d/dx (any constant) = 0 , d/dx (x) = 1, d/dx (x2) = 2x , d/dx (x3) = 3x2 , d/dx (xn) = n xn-1
A second way to think of derivatives and integrals is as inverse functions of each other. That
is, the integral asks the question - what function must we take the derivative of to obtain what
is inside the integral sign.
Look at the indefinite integral . This integral asks the question - what function
must we take the derivative of to obtain 'x' (what is inside the integral sign).
Some basic integrals,
that is, the integral of a sum (or difference) is the sum (or difference) of the integrals.
, where A is any constant
7/12/12
Shearing Force
The shearing force (SF) at any section of a beam represents the tendency for the portion of
the beam on one side of the section to slide or shear laterally relative to the other portion.
The diagram shows a beam carrying loads of W1, W2 and W3 and is simply supported at two points
where the reactions are R1 and R2.
Assume that the beam is divided into two parts by a section XX .
The resultant of the loads and reaction acting on the left of AA is F vertically upwards and
since the whole beam is in equilibrium, the resultant force to the right of AA must be F
downwards.
F is called the Shearing Force at the section AA. It may be defined as follows:-
The shearing force at any section of a beam is the algebraic sum of the lateral components of
the forces acting on either side of the section.
Where forces are neither in the lateral or axial direction they must be resolved in the usual
way and only the lateral components used to calculate the shear force.
7/12/12
In a similar manner if the Bending moments (BM) of the forces to the left of AA are
clockwise then the bending moment of the forces to the right of AA must be anticlockwise.
Bending Moment at AA is defined as the algebraic sum of the moments about the section
of all forces acting on either side of the section
Bending moments are considered positive when the moment on the left portion is clockwise
and on the right anticlockwise.
This is referred to as a sagging bending moment as it tends to make the beam concave
upwards at AA.
A negative bending moment is termed hogging.
Bending Moments
7/12/12
Shear Force - Moment Relationship
Consider a short length of a beam under a distributed load separated by a distance x.
The bending moment at section AD is M and
the shear force is S.
The bending moment at BC = M + M and
The shear force is S + S.
The equations for equilibrium in 2 dimensions
results in the equations.. Forces.
S - w.x = S + S
Therefore making x infinitely small, dS /dx = - w
Moments.. Taking moments about C
M + Sx - M - M - w(x)2 /2 = 0
Therefore making x infinitely small then dM /dx = S
and putting the relationship into integral form.
The integral (Area) of the shear diagram
between any limits results in the change of
the shearing force between these limits
and
the integral of the Shear Force diagram
between limits results in the change in
bending moment...
7/12/12
To understand the shear forces and bending moments in a beam, we will look at a simple example.
In Diagram 1, we have shown a simply supported 20 m beam with a load of 10,000 N . acting
downward right at the center of the beam. Due to symmetry the two support forces will be equal,
with a value of 5000 each. This is the static equilibrium condition for the whole beam.
Next examine a section of the beam.
We will cut the beam at an arbitrary distance (x) between 0
and 10 feet, and apply static equilibrium conditions to the
left end section as shown in Diagram 2..
We can do this since as the entire beam is in static
equilibrium, then a section of the beam must also be in
equilibrium.
Note: M is a moment or torque - not a force. It does not
appear in the sum of forces equation when we apply
static equilibrium to the section
7/12/12
Equilibrium Conditions:
Sum of Forces in y-direction: + 5000 - V = 0 , solving V = 5000.
Sum of Toque about left end: -V * x + M = 0 , or - 5000 * x + M = 0 ,
M = 5000 x.
These are the equations for the shear force and bending moments for the section of the beam from
0 to 10 feet.
Notice that the internal shear force is a constant value of 5000 for the section, but the value of
the internal torque (bending moment) varies from 0 at x = 0, to a value of 50,000 at x = 10.
We cut the beam at distance x from the left end, where x is now greater than 10 and less then 20
and then look at entire section to the left of where we cut the beam (See Diagram 3).
Where the beam was cut, we have an internal shear force and bending moment - which now
become external. These are shown in Diagram 3 as V2 and M2.
(We add the '2', to indicate we are looking at section two of the beam.)
7/12/12
Equilibrium Conditions:
Sum of Forces in y-direction: + 5000 - 10,000 - V = 0 , solving V2 = -5000
Sum of Toque about left end: -10,000 * 10 -V * x + M = 0 , or
-10,000 * 10 - (-5000 ) * x + M = 0 , then solving
M2 = -[5000x - 100,000]
The two expressions above give the value of the internal shear force and bending moment in the
beam, between the distances of the 10 and 20.
A useful way to visualise this information is to make Shear Force and Bending Moment
Diagrams - which are really the graphs of the shear force and bending moment expressions
over the length of the beam. (See Diagram 4.)
7/12/12
SIGN CONVENTION
The signs associated with the shear force and bending moment are defined in a different
manner than the signs associated with forces and moments in static equilibrium.
The Shear Force is positive if it tends to rotate the beam section clockwise with respect to a
point inside the beam section.
The Bending Moment is positive if it tends to bend the beam section concave facing upward.
(Or if it tends to put the top of the beam into compression and the bottom of the beam into tension.)
Diagram 1, Shear Force V and Bending
Moment M acting in positive directions.
Diagram 2, V is not shown but the horizontal force Fx is shown.
7/12/12
A loaded, simply supported beam is shown. For this beam we would like to determine expressions
for the internal shear forces and bending moments in each section of the beam, and to make shear
force and bending moment diagrams for the beam.
Part A.
We first find the support forces acting
on the structure. We do this in the
normal way, by applying static
equilibrium conditions for the beam.
STEP 1: Draw a free body diagram showing and labeling
all load forces and support (reaction) forces, as well as
any needed angles and dimensions.
STEP 2: Break any forces not already in x and y direction
into their x and y components.
STEP 3: Apply the equilibrium conditions.
Sum Fy = -4,000 - (1,000 )(8) - 6,000 + By + Dy = 0
Sum TB = (Dy)(8) - (6,000)(4) + (1,000)(8)(4) + (4,000)(8) = 0
Solving for the unknowns: By =23,000; Dy = -5,000
(The negative sign indicates that Dy acts the opposite
of the initial direction we chose.)
7/12/12
Part B: Now we will determine the Shear Force and Bending Moment expressions for each
section of the loaded beam.
For this process we will cut the beam into sections, and then use the translational equilibrium
condition for the beam section (Sum of Forces = zero) to determine the Shear Force expressions in
each section.
Determining the Bending Moment expression for each section of the beam may be done in two
ways.
1) By applying the rotational equilibrium condition for the beam section (Sum of Torque =
zero), and solving for the bending moment.
2) By Integration. The value of the bending moment in the beam may be found from . That
is, the bending moment expression is the integral of the shear force expression
for the beam section.
We begin by starting at the left end of the beam, and cutting the beam a distance "x" from the left
end - where x is a distance greater than zero and less the position where the loading of the beam
changes in some way. In this problem we see that from zero to eight feet there is a uniformly
distributed load of 1000 lb./ft. However this ends at eight feet (the loading changes). Thus for
section 1, we will cut the beam at distance x from the left end, where x is greater than zero and less
then eight feet.
7/12/12
Section 1: Cut the beam at x, where 0 < x < 8 ft., and
analyse left hand section.
1. Draw a FBD of the beam section shown and labeling all
forces and toque acting - including the shear force and
bending moment (which act as an external force and torque
at the point where we cut the beam.) (See Diagram - Section
1)
Notice we have drawn the shear force and bending
moment in their positive directions according to the
defined sign convention and have labeled them as V1 and
M1, as this is section 1 of the beam.
2. We check that we have all forces in x & y components
3. Apply translational equilibrium conditions to determine
the shear force expression.
Sum Fx = 0 (no net external x- forces)
Sum Fy = -4,000 - 1,000 *(x) - V1 = 0 ; and
solving: V1 = [-4,000 - 1,000x]
This expression gives us the values of the internal shear force in the beam between 0 and 8. Notice
as x nears zero, the shear force value in the beam goes to 4000 , and as x approaches 8 the
shear force value becomes -12,000 , and that is negative everywhere between 0 and 8
7/12/12
Referring to the free body diagram for beam section 1,
Sum Torque left end = -1000 * (x) * (x/2) - V1 (x) + M1 = 0
Substitute the expression for V1 (V1 = [-4,000 - 1,000x])
Sum Torque left end = -1000 * (x) * (x/2) -[-4,000 - 1,000x] (x)
+ M1 = 0 ;
and solving for M1 = [-500x2 - 4,000x].
Obtain the expression for the bending moment by integration of
the shear force expression.
- 1000(1/2 x2) - 4000 (x) + C1; so M1 = -500x2 - 4,000x + C1
To determine the correct value for C1 for our
problem we must apply a boundary condition: That
is, we must know the value of the bending moment
at some point on our interval into, to find the
constant.
For simply supported beams (with no external torque
applied to the beam) the value of the bending moment
will be zero at the ends of the beam. So we have for
our "boundary condition" that at x = 0, M1 = 0. for
the bending moment (M1 = -500x2 - 4,000x + C1),
that is:
0 = -500(0)2 - 4,000(0) + C1, and solving: C1 = 0
Therefore: M1 = [-500x2 - 4,000x]
for 0 < x < 8 ft., is the expression for the bending
7/12/12
Now continue with the next section of the beam. Referring to the beam diagram, we see that at
a location just greater than 8 ft., there is no loading, and that this continues until 12 ft. where
there is a point load of 6,000 lb.
So for our second section, we cut the beam at a location "x", where x is greater than 8 ft., and
less than 12 ft - and then analyse the entire left hand section of the beam.
1. Draw a FBD of the beam section shown and
labeling all forces and toque acting - including
the shear force and bending moment (which act
as an external force and torque at the point
where we cut the beam.) (See Diagram - Section
2) Notice we have drawn the shear force and
bending moment in their positive directions
according to the defined sign convention
discussed earlier, and have labeled them as V2
and M2, as this is section 2 of the beam.
2. We check that we have all forces in x & y components
3. Apply translational equilibrium conditions (forces only):
Sum Fx = 0 (no net external x- forces)
Sum Fy = -4,000 - 1,000 (8 ) + 23,000 - V2 = 0,
Solving: V2 = 11,000.
4. Determine the bending moment expression by applying
rotational equilibrium conditions, or by integration.
7/12/12
Rotational Equilibrium:
Sum of Toque left end = - (1000 * 8) * 4 + 23,000 * 8 - V2 * x + M2 = 0;
then we substitute the value for V2 (V2 = 11,000) from above and obtain:
- (1000 * 8 ) * 4 + 23,000 * 8 - (11,000) * x + M2 = 0; and then solving for M2
we find: M2 = [11,000x - 152,000]
Similarly from integration of the shear force, we find:
Integration:
We get our boundary condition from another characteristic of the bending moment expression -
which is that the bending moment must be continuous. That is, the value of the bending moment at
the end of the first beam section, and the value of the bending moment at the beginning of the
second beam section must agree - they must be equal.
We determine the value of the bending moment from our M1 equation as x approaches 8 .
(M1 = [-500 (8)2 - 4,000(8)] = -64,000)
Then our boundary condition to find C2 is: at x=8 , M=-64,000 . We apply our boundary
condition to find C2.
Apply BC: -64,000 = 11,000 (8) + C2, Solving: C2 = -152,000
Therefore: M2 = [11,000x - 152,000] for 8 < x < 12
In like manner we proceed with section 3 of the beam, cutting the beam at a location greater than
12 and less 16 , and then analysing the entire section left of where we cut the beam.
, or M2 = 11,000 x + C2
7/12/12
Section 3: Cut the beam at x, where 12 < x < 16 . Analyse left hand section.1. FBD. (See Diagram Section 3)
2. All forces in x & y components
3. Apply translational equilibrium conditions
(forces only):
Sum Fx = 0 (no net external x- forces),
Sum Fy = -4,000 - 1,000 (8 ) + 23,000 -
6,000 - V3 = 0, and Solving: V3 = 5,000.
4. We may determine the bending moment
expression by applying rotational equilibrium
conditions, or by integration. Once more we
will do it both ways for this section.
Sum of Toque left end = - (1000 * 8) * 4 + 23,000 * 8 - 6,000 * 12 -V3 * x + M3 = 0;
then we substitute the value for V3 (V3 = 5,000 ) from above and obtain:
- (1000 * 8) * 4 + 23,000 * 8 - 6,000 * 12 - (5,000) * x + M3 = 0; and
then solving for M3 we find: M3 = [5,000x - 80,000]. We will find the bending moment
expression for this section using integration only.
Integration , or M3 = 5,000x + C3.
We obtain a boundary condition for section 3 by remembering that at a free end or simply
supported (no external torque) end, the bending moment must go to zero,
thus we have the boundary condition to find C3: at x = 16 , M = 0.
Apply BC: 0 = 5,000(16) + C3, and Solving: C3 = -80,000.
Therefore: M3 = [5,000x - 80,000] for 12 < x < 16. Additional, we have shown the shear force
and bending moment diagrams for the entire beam - which is a visual representation of the
internal shear forces and internal torque in the beam due to the loading.
7/12/12
Part C: Shear Force and Bending Moment Diagrams:
Using the expressions found , we can draw the shear force and bending moment diagrams for
our loaded beam.
V1 = -1,000x+4,000; V2 = 11,000; V3 = 5,000
M1 =-500x2+4,000x .; M2 = 11,000x -152,000 ; M3 = 5,000x-80,000
7/12/12
The sketches below show simply supported beams with one concentrated force.
The sketches below show Cantilever beams with three different load combinations
7/12/12
A cantilever 5 m long carries a uniformly distributed vertical load 480 N per metre from C from H,
and a concentrated vertical load of 1000 N at its mid-length,D. Construct the SFD and BMD.
The SF due to the distributed load increases uniformly from
zero at H to + 1920 N at C, and remains constant at +1920
N from C to B; this is shown by the lines (i). Due to the
concentrated load at D, the shearing force is zero from H to
D, and equal to +1000 N from D to B, as shown by lines (ii).
Adding the two together we get the total shearing force
shown by lines (iii).
The bending moment due to the distributed load increases
parabolically from zero at H to
at C. The total load on CH is 1920 N with its centre of
gravity 3 m from B; thus the bending moment at B due to
this load is
From C to B the bending moment increases uniformly,
giving lines (i). The bending moment due to the
concentrated load increases uniformly from zero at D to
at B, as shown by lines (ii). Combining (i) and (ii), the total
bending moment is given by (iii).
The method used here for determining shearing-force and bending-moment diagrams is known as the
pri nci pl e of superposi ti on.
7/12/12
Canti l ever wi th non-uni forml y di stri buted
l oad:
Where a cantilever carries a distributed lateral load of variable intensity, we can find the bending
moments and shearing forces from equations (4) and (6). When the loading intensity w cannot be
expressed as a simple analytic function of z, these equations can be integrated numerically.
A cantilever of length 10 m, built in at its left end, carries a distributed lateral load of varying
intensity w N per metre length. Construct curves of SF and BM in the cantilever.
If z is the distance from the free end of cantilever, the
shearing force at a distance z from the free end is
We find first the shearing force F by
numerical integration of the w-
curve. The greatest force occurs at
the built-in end, and has the value
The bending moment at a section a distance z from
the free end is
and is found therefore by numerical integration of the
F-curve. The greatest bending moment occurs at the
built-in end, and has the value
It should be noted that by inspection the bending moment and the shearing force at the free end
of the cantilever are zero; these are boundary conditions.
7/12/12
m
L
x
m
x
( )
z
M x
x=L-x
( )
y
V x
cut beam and find
internal forces and
moment
( ) P x
m
x
( )
z
M x m
x
L
z
M
1. Cantilever beam with end
moment, m
Sum forces in x and y direction
to obtain P(x)=0 and
Sum moments at any point
x
to obtain
7/12/12
L
x
x
( )
z
M x
x=L-x
( )
y
V x
cut beam and find
internal forces and
moment
( ) P x
x
F
F
F
2. Cantilever beam with end
load, F.
or
( ) ( )
z
M x F L x
L
FL
( )
y
V x F
z
M
y
V
F
x
L
x
The shear and moment
diagrams:
Sum forces in y direction to find
7/12/12
x
( )
z
M x
x=L-x
( )
y
V x cut beam and find
internal forces and
moment
( ) P x
x
L
x
0
p
0
p 0
p
3. Cantilever beam with uniform distributed
load, po
Sum forces in y direction to
obtain
L
z
M
y
V
x
L
x
0
( ) ( )
y
V x p x L
0
p L
2
0
( ) ( ) / 2
z
M x p L x
2
0
/ 2 p L
Sum moments at any point x to
obtain
o
r
Shear and bending moment
diagrams :
7/12/12
3a. Cantilever beam with uniform distributed load, po. Use the
integration method to obtain V&M diagrams.
L
x
0
p
We know the shear at x=L is 0, so lets
integrate
from x=L to any point x:
Next, integrate the shear equation to obtain the moment
equation.
We know the moment is zero at the free
end,
x=L, so integrate from x=L to any point x:
7/12/12
4. Simply Supported Beam with Point
Load
From equilibrium: R1 + R2
= P
7/12/12
5. Simply Supported Beam with Distributed
Normal Load
V(x)
M(x)
x'=L-x
x
R
1
R
2
R
2
NO MOMENTS AT ENDS
WITH SIMPLE SUPPORTS
p
o
p
o
p
o
L
From equilibrium: R1 = R2 =
poL/2.
M( x)
x
L
V(x)
x
L
L/2 p
o
M(x)=(p
o
/2) x (x-L)
7/12/12
ds
d 1
Small deflection and
slope
dx
d
ds
d 1
7/12/12
7/12/12
We assume that the predominate deflection is normal to the x axis. Predominate strain is
in the axial (x) direction. Assume small strain and rotations of beam so that axial strains
vary linearly over cross-section or plane sections remain plane.
In terms of the general elasticity problem, the above can be stated as
1. If the cross-sectional dimensions are small compared to the beam length, then applied
transverse tractions (in y and z directions) will be small compared to the resultant internal
stress in the x direction. --> smal l transverse l oads produce l arge axi al
stresses. Thus we assume that the only major stress is Txx (all other stresses are zero
or negligible).
The stress tensor reduces to
.
Equilibrium Conservation of Linear Momentum reduces to
This implies that Txx=Txx(y,z) for any point x.
2. Stress-Strain. We assume a linear isotropic material so that stress and strain are
linearly related to each other: Txx = E xx and yy = zz = - xx = -
( /E) Txx.
If Txx=Txx(y,z), then xx= xx(y,z) also.
3. Strain-Displacement
4. Kinematic assumptions: All deformation is described by the displacement,
and rotation of the centroidal axis.
Vertical displacement is function of x only:
7/12/12
7/12/12
7/12/12
TYPES of BENDING:
Pure or ci rcul ar bendi ng: This type of bending occurs when the only internal force in the bar is
a constant bending moment, i.e., the axial (N) and shear (V ) forces and the torsional moment (T)
are zero. The designation of circular bending is suggested by the fact that the deformed axis of the
initially prismatic bar is an arc of circumference, when the bending moment is constant (a constant
moment implies a constant curvature).
Non-uni form bendi ng: This designation is normally used for a loading causing bending moment
and shear force, that is, for a non-constant bending moment. The axial force and the torsional
moment are zero.
Composed bendi ng: This designation is used for a loading causing bending moment and axial
force. Constant (circular composed bending):
Variable (non-uniform composed bending):
Each of these three types of bendi ng may be
sub-di vi ded i nto pl ane and i ncl i ned bendi ng.
7/12/12
An el ementary bendi ng probl em i s that of a rectangul ar beam under end coupl es.
Consider a straight uniform beam having a rectangular cross-section of breadth b and depth h,
figure a, the axes of symmetry of the cross-section are Cx , Cy. A long length of the beam is bent
in the yz-plane, Figure b, in such a way that the longitudinal centroidal axis, Cz, remains
unstretched and takes up a curve of uniform radius of curvature, R.
We consider an elemental length z of the beam, remote from the ends; in the unloaded
condition, AB and FD are transverse sections at the ends of the elemental length, and these
sections are initially parallel. In the bent form we assume that planes such as AB and FD remain
flat planes; A B and F D in Figure b are therefore cross-sections of the bent beam, but are no
longer parallel to each other.
In the bent form, some of the longitudinal
fibres, such as A F ; are stretched, whereas
others, such as B D are compressed.
The unstrained middle surface of the beam is
known as the neutral axis.
7/12/12
Now consider an elemental fibre HJ of the beam, parallel to the longitudinal axis Cz, Figure c;
this fibre is at a distance y from the neutral surface and on the tension side of the beam.
The original length of the fibre HJ in the unstrained beam is z; the strained length is
because the angle between A B and F D in Figure b and c is
(zR). Then during bending HJ stretches an amount
The longitudinal strain of the fibre HJ is therefore
Then the longitudinal strain at any fibre is proportional to the
distance of that fibre from the neutral surface; over the
compressed fibres, on the lower side of the beam, the strains are
of course negative.
If the material of the beam remains elastic during bending then
the longitudinal stress on the fibre HJ is
.. 1
7/12/12
The distribution of longitudinal stresses over the cross-section takes the form shown in Figure d;
because of the symmetrical distribution of these stresses about Cx, there i s no resul tant
l ongi tudi nal thrust on the cross-section of the beam. The resultant hogging moment is
.. 2
On substituting for from equation (1), we have
.. 3
where Ix is the second moment of area of the
cross-section about Cx. From equations (1) and
(3), we have
.. 4
Equation (3) implies a linear relationship between M, the applied moment, and (l /R), the curvature of the beam.
The constant EI, in this linear relationship is called the bendi ng sti f fness or f l exural sti f fness of the beam;
E I is also known as Flexural Rigidity.
7/12/12
Bendi ng of a beam about a pri nci pal axi s
We considered the bending of a straight beam of rectangular cross-section; this form
of cross-section has two axes of symmetry. More generally we are concerned with sections having
only one, or no, axis of symmetry.
Consider a long straight uniform beam having any cross-sectional form; the axes Cx and Cy are
principal axes of the cross-section. The pri nci pal axes of a cross-secti on are those
centroi d axes for whi ch the product second moments of area are zero. In Figure a, C is the
centroidal of the cross-section; Cz is the longitudinal centroidal axis.
When end couples M are applied to the
beam, we assume as before that
transverse sections of the beam remain
plane during bending. Suppose further
that, if the beam is bent in the yz-plane
only, there is a neutral axis C ' x ;
Figure a, which is parallel to Cx and is
unstrained; radius of curvature of this
neutral surface is R, Figure b.
As before, the strain in a longitudinal fibre at a distance y from C x is
If the material of the beam remains elastic during bending
the longitudinal stress on this fibre is
If there is to be no resultant longitudinal thrust on the beam at any
transverse section we must have
Where b is the breadth of an elemental strip of the cross-section parallel to Cx, and the integration
is performed over the whole cross-sectional area, A. But
7/12/12
This can be zero only if C ' x is a centroidal axis; now, Cx is a principal axis, and is therefore a
centroidal axis, so that C x and Cx are coincident, and the neutral axis is Cx in any cross-section
of the beam. The total moment about Cx of the internal stresses is
.. 5
The stress in any fibre a distance y from Cx is
.. 6
No moment about Cy is implied by this stress system, for
because Cx and Cy are principal axes for which , or the product second moment of area,
is zero; A is an element of area of the cross-section.
Beams havi ng two axes of symmetry i n the cross-secti on:
I-section
beam
.
Solid circular
cross-section
Hollow circular
cross-section.
For bending about the axis Cx
Similarly for bending by a couple My about Cy,
From above equati ons (7) and (8) we see that
the greatest bendi ng stresses occur i n the
extreme l ongi tudi nal fi bres of the beams.
.. 7
.. 8
7/12/12
A steel bar of rectangular cross-section, 10 cm deep and 5 cm wide, is bent in the planes of the
longer sides. Estimate the greatest allowable bending moment if the bending stresses are not to
exceed 150 MN/m2 in tension and compression.
The bending moment is applied about Cx. The second moment of area
about this axis is
The bending stress at a fibre a distance y from Cx is,
where M is the applied moment. If the greatest stresses are not
to exceed 150 MN/m2, we must have
The greatest bending stresses occur in the extreme fibres where y = 5 cm.
Then
The greatest allowable bending moment is therefore 12 500 Nm.
The second moment of area about Cy is
The greatest allowable bending moment about Cy is
which is only half that about Cx.
7/12/12
A light-alloy I-beam of 10 cm overall depth has flanges of overall breadth 5 cm and thickness 0.625
cm, the thickness of the web is 0.475 cm. If the bending stresses are not to exceed 150 MN/m2 in
tension and compression estimate the greatest moments which may be applied about the principal
axes of the cross section.
Consider, first, bending about Cx. the second moment of area about Cx is
The allowable moment M, is
Second, for bending about Cy.
The allowable moment about Cy is
A steel scaffold tube has an external diameter of 5 cm, and a thickness of 0.5 cm. Estimate the
allowable bending moment on the tube if the bending stresses are limited to 100 MN/m2.
7/12/12
A steel scaffold tube has an external diameter of 5 cm, and a thickness of 0.5 cm. Estimate the
allowable bending moment on the tube if the bending stresses are limited to 100 MN/m2.
The second moment of area about a centroid axis Cx is
The allowable bending moment about Cx is
Beams havi ng onl y one axi s of symmetry:
(i) Channel section. (ii) Equal angle section. (iii) T-section.
7/12/12
A T-section of uniform thickness 1 cm has a flange breadth of 10 cm and an overall depth of 10
cm. Estimate the allowable bending moments about the principal axes if the bending stresses are
limited to 150 MN/m2.
Suppose is the distance of the principal axis Cx from the remote edge of the flange. The total
area of the section is
On taking first moments of areas about the upper edge of the flange,
The second moment of area of the flange about Cx is
The second moment of area of the web about Cx is
For bending about Cx, the greatest bending stress occurs at the toe of the web.
The maximum allowable moment is
The second moment of area about Cy is
The T-section is symmetrical about Cy, and for bending about this axis equal tensile and compressive stresses are
induced in the extreme fibres of the flange; The bending stress in the extreme fibres of the flange is only
60.4 MN/m2 at this bending moment.
The greatest allowable moment is
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
A light-alloy I-beam of 10 cm overall depth has flanges of overall breadth 5 cm and thickness 0.625
cm, the thickness of the web is 0.475 cm. The I-section is bent by couples of 2500 Nm about Cx
and 500 Nm about Cy. Estimate the maximum bending stress in the cross-section, and
find the equation of the neutral axis of the beam.
For bending about Cx the bending stresses in the extreme fibres of the
flanges are
For bending about Cy the bending stresses at the extreme ends of the
flanges are
On superposing the stresses due to the separate moments, the stress at the
comer a is tensile, and of magnitude
The total stress at the comer a 'is also 172.2 MN/m2, but compressive.
The total stress at the comer b is compressive, and of magnitude
The total stress at the comer b 'is also 20.0 MN/m2, but tensile.
The equation of the neutral axis is given by
and
The greatest bending stresses occur at points most remote from the neutral axis; these are the
points a and a the greatest bending stresses are therefore + 172.2 MN/m'.
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
The shear load and bending moment diagrams
are constructed by integrating the distributed load
to get the shear diagram
(adding jumps at all point loads), and
integrating the shear diagram to get the bending
moment (adding jumps at all point couples).
Drawing shear force and bending moment diagrams
Example of one shear load and bending moment diagram.
1. First draw the free-body-diagram of the beam with
sufficient room under it for the shear and moment
diagrams (if needed, solve for support reactions first).
2. Draw the shear diagram under the free-body-
diagram. The distributed load is the slope of the shear
diagram and each point load represents a jump in the
shear diagram. Label all the loads on the shear
diagram
3. Draw the moment diagram below the shear
diagram. The shear load is the slope of the moment
and point moments result in jumps in the moment
diagram. The area under the shear diagram equals the
change in moment over the segment considered (up to
any jumps due to point moments). Label the value of
the moment at all important points on the moment
diagram.
7/12/12
For the beam and loading shown, (a) draw
the shear and bending moment diagrams,
(b) determine the maximum absolute values
of the shear and bending moment.
(a) FBD Beam:
Along AB:
7/12/12
(b) From diagrams:
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Built -in (Encastre) beams are fixed at both ends.Continuous beams, which
are beams with more than two supports and covering more than one span, are
not statically determinate using the static equilibrium laws.
Nomenclature
= strain, = stress (N/m2), E = Young's Modulus = /e (N/m2),
y = distance of surface from neutral surface (m), R = Radius of neutral axis
(m).
I = Moment of Inertia (m4 - more normally cm4)
Z = section modulus = I/y max(m3 - more normally cm3)
M = Moment (Nm), w = Distributed load on beam (kg/m) or (N/m as force
units)
W = total load on beam (kg ) or (N as force units), F= Concentrated force on
beam (N)
L = length of beam (m), x = distance along beam (m)
Built in beams
A built in beam is normally considered to be horizontal with both ends built-in
at the same level and with zero slope at both ends. A loaded built in beam
has a moment at both ends and normally the maximum moments at one or
both of the two end joints.
A built in beam is generally much stronger than a simply supported beam of
the same geometry.The bending moment reduces along the beam and
changes sign at points of contra flexure between the supports and the load.
7/12/12
A typical built-in beam is shown below: It is not normally possible to determine the
bending moments and the resulting stress using
static equilibrium. Deflection calculations are
often used to enable the moments to be
determined. It has been proved that
dM/dx = S and dS/dx = -w = d2M /dx
Where S = the shear force, M is the moment and
w is the distributed load /unit length of beam.
Therefore
7/12/12
Using the above equations the bending moment, shear force, deflection, slope can be
determined at any point along the beam.
M = EI d 2y/dx 2 = w(- 6x2+6lx -l2)/12
at x = 0 & l then M = -wl2 /12 and at x = l/2 then M = wl2 /24
S = EI d 3y/dx 3 = w(l/2 - x) at x = 0 then S = w.l/2 at x = l then S = -w.l/2
Built-in beam carrying a single lateral
load:
Consider a uniform beam, of flexural stiffness EI,
and length L, which is built-in to end supports C
and G, Fig.
Suppose a concentrated vertical load W is applied
to the beam at a distance a from C.
If MC and MG are the restraining moments at the
supports, then the vertical reaction is at C is
7/12/12
7/12/12
First boundary conditions are: when z = 0, v = dv/dz = 0
As the Macaulay brackets will be negative when these boundary conditions are
substituted, the terms on the right of equations can be ignored, hence A = B
= O
Other boundary conditions are: at z = L, v = dv/dz = 0
which on substituting into equations give the following two simultaneous
equations:
MC and MG are referred to as the fixed-end
moments of the beam; MC is measured
anticlockwise, and MG clockwise.
In the particular case when the load W is
applied at the mid-length, a = L/2., and
The bending moment in the beam vary linearly from hogging moments of WL/8
at each end to a sagging moment of WL/8 at the mid-length, Figure above.
There are points of contra-flexure, or zero bending moment, at distances L/4
from each end.
7/12/12
Fixed-end moments for other loading conditions
The built-in beam of Fig. carries a uniformly distributed load of w per unit
length over the section of the beam from z = a to z = b.
Consider the loading on an elemental
length z of the beam; the vertical load
on the element is w z , and this induces a
retraining moment at C of amount
The total moment at C due to all
loads is
which
gives
MG may be found similarly. When the load covers the whole of the span, a = 0
and b = L, and equation reduces to
In this particular case, MC = MG; the variation of bending moment is parabolic,
and of the form shown in Fig. the bending moment at the mid-length is
so the fixed-end moments are also the greatest bending moments
in the beam.
The points of contra-flexure: from each end of the beam.
7/12/12
When a built-in beam carries a number of concentrated lateral loads, W1, W2,
and W3, the fixed-end moments are found by adding together the fixed-end
moments due to the loads acting separately. For example,
The case of a concentrated couple M0 applied a distance a from the end C, Fig,
as a limiting case of two equal and opposite loads W, small distance a apart.
The fixed-end
moment at C is
7/12/12
Disadvantages of built-in beams
The results we have obtained above show that a beam which has its ends
firmly fixed in direction is both stronger and stiffer than the same beam with its
ends simply-supported. On this account it might be supposed that beams
would always have their ends built-in whenever possible; in practice it is not
often done.
There are several objections to built-in beams: in the first place a small
subsidence of one of the supports will tend to set up large stresses, and, in
erection, the supports must be aligned with the utmost accuracy; changes of
temperature also tend to set up large stresses. Again, in the case of live loads
passing over bridges, the frequent fluctuations of bending moment, and
vibrations, would quickly tend to make the degree of fixing at the ends
extremely uncertain.
Most of these objections can be obviated by employing the double cantilever
construction. As the bending moments at the ends of a built-in beam are of
opposite sign to those in the central part of the beam, there must be points of
inflexion, i.e. points where the bending moment is zero.
At these points a hinged joint might be made in the beam, the axis of the
hinge being parallel to the bending axis, because there is no bending moment
to resist. If this is done at each point of inflexion, the beam will appear as a
central girder freely supported by two end cantilevers; the bending
moment curve and deflection curve will be exactly the same as if the beam
were solid and built in. With this construction the beam is able to adjust itself
to changes of temperature or subsistence of the supports.
7/12/12
A horizontal beam 6 m long is built-in at each end. The elastic section modulus
is . Estimate the uniformly-distributed load over the whole span
causing an elastic bending stress of 150 MN/m2.
The maximum bending moments occur at built-in ends, and have value
The bending stress is 150
MN/m2,
7/12/12
Continuous Beams
This type of beam is normally considered using the Clapeyron's Theorem ( Three
Moments theorem) . The three moments theorem identifies the relationship between the
bending moments found at three consecutive supports in a continuous beam.This is
achieved by evaluating the slope of the beam at the end where the two spans join.The
slopes are expressed in terms of the three moments and the supported loads which are
then equated and the resulting equations solved. This relationship for spans with
supports at the same height and with spans of constant section results in the following
expression.
If the beams has a different section for each span then the more general expression
applies as shown below.
7/12/12
Theorem of Three
Moments
A beam that is continuous across a support can have a bending moment there, unlike a
beam that is merely supported. As an example, consider a prop placed at the centre of a
beam that is simply supported at both ends. The amount of weight taken by the prop
depends on how long it is, and the elasticity of the beam, and cannot be found by the
application of the equations of statics. Such a system is called statically indeterminate.
A remarkable relation between the bending moments at three supports in a row, that
depends only on the loads between the three supports, was discovered by Clapeyron,
and is called the Theorem of Three Moments.
It is derived by integrating the equation for the elastic curve, EI(d4y/dx4) = -w(x),
where y is the deflection, and w(x) is the load per unit length. There are enough
conditions to eliminate the constants of integration, and the result is the desired
theorem.
The functions f(x) and F(x) are found by
integrating the load density with respect
to x from x = 0 four times, setting the
constants of integration to zero.
For a uniform load w, f(x) = wx4/24.
The quantities y are the upward
displacements of the supports 1 and 2.
7/12/12
Areas and x 1 value calculations.
7/12/12
This is a two span continuous beam with the ends simple supported, therefore with no
moments at the end support points..
1) Bending Moments.
7/12/12
7/12/12
This is a three span continuous beam with the ends simple supported, therefore with no
moments at the end support points. The values of A1,x1,A2, and x2 are calculated using
the methods above.
7/12/12
7/12/12
7/12/12
Click to edit Master subtitle style
7/12/12
UNIT 4
Deflection of Beams
Differential Equation of elastic curve-
deflection of beam by double integration
method area moment theorems
application to simply supported beams,
cantilever beams, overhanging beams.
Deflection due to shear,
SFD and BMD for propped cantilever, built-in
beams, continuous beams.
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
7/12/12
DEFLECTION of BEAMS:
The loading actions at any section of a simply-supported beam or cantilever can be resolved into a
bending moment and a shearing force. There are ways of estimating the stresses due to these
bending moments and shearing forces. There is, however, another aspect of the problem of
bending which remains to be treated, namely, the calculation of the sti ffness of a beam. In
most practical cases, it is necessary that a beam should be not only strong enough for its purpose,
but also that it should have the requisite stiffness, that is, it should not deflect from its original
position by more than a certain amount.
Again, there are certain types of beams, such as those carried by more than two supports and
beams with their ends held in such a way that they must keep their original directions, for which
we cannot calculate bending moments and shearing forces without studying the deformations of
the axis of the beam; these problems are in fact stati cal l y i ndetermi nate. In this module we
consider methods of finding the deflected form of a beam under a given
system of external loads and having known conditions of support.
El asti c bendi ng of strai ght beams:
From Beam Equation a straight beam of uniform cross-section, when subjected to end couples M
applied about a principal axis, bends into a circular arc of radius R, given by
where EI, the product of Young's modulus E and the second moment (1)
of area I about the relevant principal axis, is the fl exural sti ffness of
the beam; equation (1) holds only for elastic bending.
Where a beam is subjected to shearing forces, as well as bending moments, the axis of the beam
is no longer bent to a circular arc. To deal with this type of problem, we assume that equation still
defines the radius of curvature at any point of the beam where the bending moment is
M. This implies that where the bendi ng moment vari es from one secti on of the beam to
another, the radi us of curvature also varies from section to section, in accordance with eqn.(1)
7/12/12
Di fferenti al Equati on of el asti c curve:
In the unstrained condition of the beam, Cz is the longitudinal centroidal axis, Figure.1, and Cx,
Cy are the principal axes in the cross-section. The co-ordinate axes Cx, Cy are so arranged that
the y-axis is vertically downwards. (This is convenient as most practical loading conditions give rise to
vertically downwards deflections.)
Suppose bending moments are applied about axes parallel to Cx, so that bending is restricted to
the yz-plane, because Cx and Cy are principal axes.
Fi g.2 Di spl acements of the l ongi tudi nal
axi s of the beam.
Fi g.1 Longi tudi nal and pri nci pal
centroi dal
axes f or a strai ght beam.
Consider a short length of the unstrained beam,
corresponding with DF on the axis Cz, Figure 2.
In the strained condition D and F are displaced to D'
and F' , respectively, which lies in the yz plane.
Any point such as D on the axis Cz is displaced by an
amount v parallel to Cy; it is also displaced a small,
but negligible, amount parallel to Cz.
The radius of curvature R at any section of the beam
is then given by
We are concerned generally with only small
deflections, in which v is small; this implies that
(dv/dz) is small, and that (dv/dz)2 is negligible
compared with unity.
(2)
(3)
7/12/12
Sign Convention: we have already adopted the convention that sagging bending moments are
positive. When a length of the beam is subjected to sagging bending moments, as in Figure 3, the
value of (dv/dz) along the length diminishes as z increases; hence a sagging moment implies that
the curvature is negative. Then (5) where M is the sagging bending moment.
Where the beam is loaded on its axis of shear centres, so that no twisting occurs, M may be
written
in terms of shearing force F and intensity w of vertical loading at any section.
Hence from 1 and 3
(4)
On substituting for M (6)
This relation is true if EI varies from one section of a beam
to another. Where El is constant along the length of a beam,
(7)
Fi g 3.Defl ected f orm of
a beam i n pure
bendi ng.
As an example of the use of equation (4), consider the case
of a uniform beam carrying couples M at its ends, Fig.3. The
bending moment at any section is M, so the beam is under a
constant bending moment. Equation (5) gives
On integrating once, we have
(8)
where A is a constant.
7/12/12
On integrating once more (9)
where B is another constant. If we measure v relative to a line CD joining the ends of the beam,
v is zero at each end. Then v = 0, for z = 0 and z = L.
On substituting these two conditions into equation (9), we have and
Therefore
At the mid-length, z = , and
(10)
(11) which is the greatest deflection.
(12)
It is important to appreciate that equation (3), expressing the radius of curvature R in terms of v,
is only true if the displacement v is small.
Fi g.4 Di storti on of a beam i n pure
bendi ng.
We can study more accurately the pure bending of a beam by
considering it to be deformed into the arc of a circle, Figure 4; as
the bending moment M is constant at all sections of the beam,
the radius of curvature R is the same for all sections.
If L is the length between the ends, and D is the mid-point,
Thus the central deflection v is
7/12/12
Suppose L/R is considerably less than unity; then
which can be written
But
Clearly, if is negligible compared with unity we have, approximately,
which agrees with equation (11). The more accurate equation (13) shows that, when is
not negligible, the relationship between v and M is non-linear; for all practical purposes this
refinement is unimportant, and we find simple linear relationships of the type of equation (11)
are sufficiently accurate for engineering purposes.
(13)
7/12/12
Si mpl y-supported beam carryi ng a uni forml y di stri buted l oad
A beam of uniform flexural stiffness EI and span L is simply-supported at its ends, Figure 5;
it carries a uniformly distributed lateral load of w per unit length, which induces bending in the yz
plane only. Then the reactions at the ends are each equal to wL; if z is measured from the end
C, the bending moment at a distance z from C is
Fi g. 5 Si mpl y-supported beam
carryi ng a uni f orml y supported
l oad.
On integrating twice,
From equation (5)
Then equation (14) becomes
The deflection at the mid-length, z = L ,
is
(14)
(15)
(16)
7/12/12
Canti l ever wi th a concentrated l oad
A uniform cantilever of flexural stiffness El and length L carries a vertical concentrated load W at
the free end, Figure 6. The bending moment a distance z from the built-in end is
Fi g. 6 Canti l ever carryi ng a
verti cal
l oad at the remote end.
At the end z = 0, there is zero slope in the deflected
form, so that dv/dz = 0; then equation (17) gives
A = 0. Furthermore, at z = 0 there is also
no deflection, so that B = 0. Then
(17)
From equation (5)
On integrating twice,
At the free end, z =
L
(18)
The slope of the beam at the free end
is
(19)
7/12/12
When the cantilever is loaded at some point between the ends, at a distance a , say, from the
built-in support, Figure 7, the beam between G and D carries no bending moments and therefore
remains straight. The deflection at G can be deduced from equation (18); for z = a,
(21)
(20)
and the slope at z = a is
Then the deflection at the free end D of the cantilever is
Fi g. 7 Canti l ever wi th a l oad
appl i ed between the ends.
(22)
7/12/12
Canti l ever wi th a uni forml y di stri buted l oad
A uniform cantilever, Figure 8, carries a uniformly distributed load of w per unit length over the
whole of its length. The bending moment at a distance z from C is
Fi g. 8 Canti l ever carryi ng
a uni forml y di stri buted
l oad.
At the built end, z = 0, and we
have
From equation (5)
On integrating twice,
Thus A = B = 0. Then
At the free end, D, the vertical deflection is
(23)
7/12/12
Propped canti l ever wi th di stri buted l oad
The uniform cantilever of Figure 9 (i) carries a uniformly distributed load w and is supported
on a rigid knife edge at the end D. Suppose P is the force on the support at D. Then we regard
Figure (i) as the superposition of the effects of P and w acting separately.
Fig 9 (i) Uniformly loaded
cantilever
propped at one end.
(ii) Deflections due to w
alone.
(iii) Deflections due to P
alone.
If w acts alone, the deflection at D is given by
equation (23), and has the value
If the reaction P acted alone, there would be an
upward deflection
at D. If the support maintains zero deflection at D,
This gives
or (24)
7/12/12
Simply-supported beam carrying a concentrated lateral load
Consider a beam of uniform flexural stiffness EI and length L, which is simply-supported at its
ends C and G, Figure 13.1 1. The beam carries a concentrated lateral load W at a distance a from
C. Then the reactions at C and G are
Fig 10. Deflections of a simply-supported
Beam carrying a concentrated lateral load.
Now consider a section of the beam a distance z from C;
if z < a, the bending moment at the section is M = V c z
and if z > a, M = V c z W (z - a)
7/12/12
In these equations A, B, A' and B' are arbitrary constants. Now for z = a the values of v given
by
equations (27) and(28) are equal, and the slopes given by equations (25) and (26) are also equal,
as there is continuity of the deflected form of the beam through the point D. Then
At the extreme ends of the beam v = 0, so that when z = 0
equation (27) gives B = 0, and when z =L, equation (28)
gives
7/12/12
Then equations (27) and (28) may be written
The second relation, for z > a, may be written
Then equations (32) and (33) differ only by the last term of equation (34); if the last term of
equation (34) is discarded when z < a, then equation (34) may be used to define the deflected
form in all parts of the beam. On putting z = a, the deflection at the loaded point D is
When W is at the centre of the beam, a = L/2 , and
This is the maximum deflection of the beam only when a = L.
7/12/12
A steel rod 5 cm diameter protrudes 2 m horizontally from a wall. (i) Calculate the deflection due to
a load of 1 kN hung on the end of the rod. The weight of the rod may be neglected. (ii) If a vertical
steel wire 3 m long, 0.25 cm diameter, supports the end of the cantilever, being taut but
unstressed
before the load is applied, calculate the end deflection on application of the load.
Take E = 200GN/m2.
The deflection at the end is
then
If this equals the stretching of the wire, then
This gives T = 934 N, and the deflection of the cantilever becomes
7/12/12
A platform carrying a uniformly distributed load rests on two cantilevers projecting a distance 1 m
from a wall. The distance between the two cantilevers is l . In what ratio might the load on the
platform be increased if the ends were supported by a cross girder of the same section as the
cantilevers, resting on a rigid column in the centre, as shown. It may be assumed that when there
is no load on the platform the cantilevers just touch the cross girder without pressure.
I having the same value for the cantilevers and cross girder.
Substituting this value of
Click to edit Master subtitle style
7/12/12
Shear Stress in a cross
section
of Beams
Prof. Dr. R. Chandra Sekaran Ph.D (C. Engg)
7/12/12
Shearing stress on any surface is defined as the
intensity of shearing force tangential to the
surface. If the block of material of Figure (a)
has an area A over any section such as ab, the
average shearing stress over the section ab
is
In many cases the shearing force is not distributed uniformly over any section; if F is the shearing
force on any elemental area A of a section, the shearing stress on that elemental area is
7/12/12
Three steel plates are held together by a 1.5 cm diameter rivet. If the load transmitted is 50 kN,
estimate the shearing stress in the rivet.
A lever is keyed to a shaft 4 cm in diameter, the width of the key being 1.25 cm and its length
5 cm. What load P can be applied at an arm of a = 1 m if the average shearing stress in the key
is not to exceed 60 MN/m2?
The torque applied to the shaft is Pa. If this is resisted by
a shearing force F on the plane ab of the key, then
where r is the radius of the shaft. Then
The area resisting shear in the key is
The permissible shearing force on the plane ab of the key is then
The permissible value of P is then
7/12/12
Two steel rods are connected by a cotter joint. If the shearing strength of the steel used in the
rods and the cotter is 150 MN/m2, estimate which part of the joint is more prone to shearing
failure.
Shearing failure may occur in the following ways:
(i) Shearing of the cotter in the planes ab and cd.
The area resisting shear is
For a shearing failure on these planes, the tensile force is
(ii) By the cotter tearing through the ends of the socket
q, i.e. by shearing the planes ef and gh. The total area
resisting shear is
For a shearing failure on these planes
(iii) By the cotter tearing through the ends of the rod p, i.e. by shearing in the planes kl and mn.
The total area resisting shear is
For a shearing failure on these planes
Thus, the connection is most vulnerable to shearing failure in the cotter itself, as discussed in (i);
the tensile load for shearing failure is 338 kN.
7/12/12
7/12/12
Relative sliding
of two separate
beams due to
shear
7/12/12
7/12/12
Small Slice of Beam
Equivalent Systems
Shear Stress on a Horizontal Plane
7/12/12
The first step in determining the shear stress at any location is to look at a section in a small slice
from the beam. Summing the forces due to the normal bending stresses in the horizontal direction
gives
Fx = 0 - P + (P + dP) + b dx = 0 dP/dx = b (1)
where b is the beam depth at the location of the shear stress being calculated.
Hori zontal Shear Stress:
P can be found by integrating the normal stress over a section A
(shown in diagram), giving
But the bending stress is b = My/I. Substituting and simplifying gives
Since M and I do not change, they can be moved outside the integral.
The integral now is just the first moment of the area that is commonly used to find the centroid of
an area, and is called "Q". Substituting P into the equation (1) and using Q, gives
Recall, the derivative, dM/dx is equal to the vertical shear load V.
This gives,
The final horizontal shear stress equation is
7/12/12
Cal cul ati ng Q:
One of the confusing aspects of determining the shear stress , is calculating Q, the first moment
of the area about the neutral axis. It is rare when the full integral,
is needed. Generally, Q can be determined using parts which is can be written as
Determining Q by Parts at Section a-a:
In determining Q, there are a number of steps that should be considered:
1. Locate the neutral axis (NA) for the full cross section.
2. Select the location where the stress will be calculated
(generally at the mid-section) and determine b
(the cross section width at that location).
3. Split the area above or below the stress location into
common geometric shapes (rectangles, circles, triangles, etc.).
4. Sum the product of each area with their respective centroid location from the NA
(Important: from the NA, not from the stress location).
Note, Q can be negati ve, but the shear stress equati on assume al l posi ti ve val ues.
Examples of Q for various shapes and stress locations
7/12/12
We consider first the simple problem of a cantilever of narrow rectangular cross-section, carrying
a concentrated lateral load F at the free end, Figure a.; h is the depth of the cross-section, and
c is the thickness, Figure b; the depth is assumed to be large compared with the thickness. The
load is applied in a direction parallel to the longer side h.
Shearing actions on an elemental length of a beam of narrow
rectangular cross-section
Consider an element a1 length z of the beam at a distance z from the loaded end. On the face
BC of the element the hogging bending moment is M = F z
We suppose the longitudinal stress at a distance y from the centroidal axis Cx is the same as
that for uniform bending of the element. Then
where I, is the second moment of area about the centroidal axis of bending, Cx, which is also a neutral axis .
On the face DE of the element the bending moment has increased to M + M = F (z + z)
The longitudinal bending stress at a distance y from the neutral axis has increased correspondingly
to
7/12/12
Now consider a depth of the beam contained between the upper extreme fibre BD, given by
and the fibre GH, given by y = y, Figure (ii). The total longitudinal force on the face BG due to
bending stresses is
By a similar argument we have that the total force on the face DH due to bending stresses
is
These longitudinal force, which act in opposite directions, are not quite in balance; they differ by
a small amount
Now the upper surface BD is completely free of shearing stress, and this out-of-balance force can
only be equilibrated by a shearing force on the face GH. We suppose this shearing force is
distributed uniformly over the face GH; the shearing stress on this face is then
This shearing stress acts on a plane parallel to the neutral surface of
the beam; it gives rise therefore to a complementary shearing stress
at a point of the cross-section a distance y, from the neutral
axis, and acting tangentially to the cross-section.
1
7/12/12
For this simple type of cross-section
and so
2
We note firstly that is independent of z; this is so because the resultant shearing force is the same
for all cross-sections, and is equal to F. The resultant shearing force implied by the variation of
is
The shearing stresses are sufficient then to balance the force F applied to every cross-section of
the beam.
The variation of over the cross-section of the beam is
parabolic, attains a maximum value on the neutral axis of
the beam, where y1 = 0, and
7/12/12
Shear stress acts on two different parallel surfaces of any element as shown in the diagram. One
side cannot be under a different shear stress magnitude than the other. If a small element is taken
from a structure under shear, parallel sides will have shear stress loading in the opposite direction,
causing it to shear as shown in the diagram. Notice, the other two sides try to resist the sliding
motion, and the stress element stays in equilibrium.
Verti cal Shear
Stress:
Shear Stress on Element
Horizontal and Vertical Shear Stress
at the Same Location in a Beam
Similarly, a small element taken from a beam under a shear loading will
have equal shear stresses in the vertical and horizontal directions as shown
in the diagram at the left. The magnitude of the shear stress will depend
on the location of the stress element.
There are three possible shear stresses on a three dimensional cube. This
section has only examined one dimension since shear loading in beams is
generally only in one direction. But just like uni-axial loading, shear loading
can be in three directions.
Rectangular beams are so common, it is helpful to plot the shear stress
from top to bottom. The resulting equation is
Rectangul ar Beams
Shear Stress Distribution in Rectangular Beam
It is a parabolic shape with the maximum
at the center. The center shear stress is
max = 1.5
V/A
7/12/12
Distribution of shear
stresses in a beam of
rectangular cross section:
(a) cross section of beam,
and (b) diagram showing
the parabolic distribution of
shear stresses over the
height of the beam.
7/12/12
Consider the shearing stresses induced in a thin-walled I-beam carrying a concentrated
load Fat the free end, acting parallel to Cy, Figure 1. The cross-section has two axes of
symmetry Cx and Cy; the flanges are of breadth b, and the distance between the
centres of the flanges is h, flanges and web are assumed to be of uniform thickness t.
Equation gives the shearing force q per unit length of beam at any region
of the cross section. Consider firstly a point I of the flange at a distance s, from a free
edge, Figure (iii); the area of flange cut off by a section through the point I is
The distance of the centroid of this area from the neutral axis Cx is
The shearing force at point I of the cross-section is
If the wall thickness t is small compared with the other linear dimensions of the cross-
section, we may assume that q is distributed uniformly over the wall thickness t; the
shearing stress is then
at point I. At the free edge, given by s1 = 0, we have = 0, since there
can be no longitudinal shearing stress on a free edge of the cross-section. The
shearing stress increases linearly in intensity as s, increases from zero to b; at the
junction of web and flanges s, = b, and
As the cross-section is symmetrical about Cy, the shearing stress in
the adjacent flange also increases linearly from zero at the free edge.
7/12/12
Consider secondly a section through the web at the point 2 at a distance s2 from the
junctions of the flanges and web. In evaluating for this section we must consider the
total area cut off by
the section through the point 2. However, we can evaluate for the component areas
cut off by
the section through the point 2; we have
If this shearing force is assumed to be uniformly distributed as a shearing
stress, then
At the junction of web and flanges s2 = 0,
and
We notice that varies parabolically throughout the
depth of the web, attaining a maximum value at s2 =
h, the neutral axis, (Figure). In any cross-section of
the beam the shearing stresses vary in the form
shown; in the flanges the stresses are parallel to Cx,
and contribute nothing to the total force on the section
parallel to Cy.
At the junctions of the web and flanges the shearing
stress in the web is twice the shearing stresses in the
flanges. The reason for this is easily seen by
considering the equilibrium conditions at the junction.
Consider a unit length of the beam along the line of the
junction, (Figure); the shearing stresses in the flanges
are
the shearing stress in the
web
7/12/12
For longitudinal equilibrium of a unit length of the junction of web and flanges, we have
which
gives
If this is true, in fact, for the relations we have
derived above; longitudinal equilibrium is ensured
at any section of the cross-section in our
treatment of the problem.
If the flanges and web were of different
thicknesses,
and tw, respectively, the equilibrium condition
at the junction would be
The
n
The implication of this equilibrium condition is that at a junction, such as that of the
flanges and web of an I-section, the sum of the shearing forces per unit length for the
components meeting at
that junction is zero when account is taken of the relevant directions of these shearing
forces.
For a junction Where is the shearing stress in an element at the
junction,
and t is the thickness of the element; the summation is carried out for all elements
meeting at the junction. For an I-section carrying a shearing force acting parallel to the
web we see that the maximum shearing stress occurs at the middle of the web, and is
given by equation. Now, Ix, for the section is given
approximately
Then
The total shearing force in the web of the beam parallel to Cy is F, if this were
Distributed uniformly over the depth of the web the average shearing stress would be
Then for the particular case when h = 3b, we have
, is only one-sixth greater than the mean shearing stress over the web.
7/12/12
The web of a girder of I-section is 45 cm deep and 1 cm thick; the flanges are each 22.5
cm wide by 1.25 cm thick. The girder at some particular section has to withstand a total
shearing force of 200 kN. Calculate the shearing stresses at the top and middle of the
web.
7/12/12
Within the limits of our present theory we can employ certain formulae to find the
principal stresses and the maximum shearing stress. On a side elevation of the beam we
can draw, lines showing the direction of the principal stresses. Such lines are called the
lines of principal stress; they are such that the tangent at any point gives the
direction of principal stress. As an example, the lines of principal stress have been drawn
in Figure for a simply-supported beam of uniform rectangular cross-section, carrying a
uniformly distributed load. The stresses are a maximum where the tangents to the curves
are parallel to the axis of the beam, and diminish to zero when the curves cut the faces
of the beam at right angles. On the neutral axis, where the stress is one of shear, the
principal stress curves cut the axis at 45".
Principal stress lines in a simply-supported
rectangular beam carrying a uniformly
distributed load.
The flanges of an I-girder are 30 cm
wide by 2.5 cm thick and the web is
60 cm
deep by 1.25 cm thick. At a particular
section the sagging bending moment
is
500 kNm and the shearing force is
500 kN. Consider a point in the
section at
the top of the web and calculate for h
s point; (i) the longitudinal stress, (ii)
the
shearing stress, (iii) the principal
stresses.
First calculate the second moment of area about the neutral axis; the second moment
of area of the web is
of each flange
is
7/12/12
It should be noticed that the greater
principal
stress is about 30% greater than the
longitudinal stress. At the top of the flange
the longitudinal stress is -96 MN/m2, so
the greatest principal stress at the top of
the web is 20%
greater than the maximum longitudinal
stress.
7/12/12
7/12/12
Shearing stresses in a channel section; shear centre
We have discussed the general case of shearing stresses in the bending of a
beam having an axis of symmetry in the cross-section; we assumed that the
shearing forces were applied parallel to this axis of symmetry. This is a
relatively simple problem to treat because there can be no twisting of the
beam when a shearing force is applied parallel to the axis of symmetry. We
consider now the case when the shearing force is applied at right angles to an
axis of symmetry of the cross-section.
Consider for example a channel section having an axis Cx of symmetry in the
cross-section, Figure ; the section is of uniform wall-thickness t, b is the total
breadth of each flange, and h is the distance between the flanges; C is the
centroid of the cross-section. Suppose the beam is supported at one end, and
that a shearing force F is applied at the free end in a direction parallel to Cy.
We apply this shearing force at a point O on Cx such that no torsion of the
channel occurs, Figure 2; if F is applied considerably to the left of C, twisting
obviously will occur in a counterclockwise direction; if F is applied considerably
to the right then twisting occurs in a clockwise direction. There is some
intermediate position of O for which no twisting occurs; as we shall see this
position is not coincident with the centroid C.
7/12/12
The problem is greatly simplified if we assume that F is applied at a point O on
Cx to give no torsion of the channel; suppose O is a distance e from the centre
of the web, at any section of the beam there are only bending actions present;
therefore, we can again use the relation
7/12/12
acting parallel to the centre lines of the
flanges; the total shearing forces in the
two flanges are in opposite directions. If
the distribution of shearing stresses T,
and T* is statically equivalent to the
applied shearing force F, we have, on
taking moments about B- the centre of
the web-- that
7/12/12
which, as we should expect, is independent of F. We note that O is remote
from the centroid C of the cross-section; the point O is usually called the shear
centre; it is the point of the cross-section through which the resultant shearing
force must pass if bending is to occur without torsion of the beam.
7/12/12
2 / h y
y y
1 1
1
dA F
2 / h y
y y
2 2
1
dA F
zz
1
I
y M
zz
2
I
y dx
x
M
M
,
_
+
7/12/12
1
F
2
F
2 / h y
y y
1
ydA Q
( ) dA F F dx b
2 / h y
y y
1 2 1 2
1
zz
bI
Q V
0
Shear Stress in Webs
b=10t h=20t
t
t
t
b
h
y
z
zz
bI
) s ( Q V
) s (
) s ( Q Q ) s ( Q
w F
+ s
3
F
t 95
2
t
2
h
bt Q
,
_
,
_
2
s
t
2
h
ts ) s ( Q
w
( ) ( ) 0 t 2 h s Q 0 s Q
w w
3
w
t
2
81
t
2
h
t
2
h
2
t
t
2
h
s Q
,
_
,
_
,
_
7/12/12
y
z
zz
3
zz
F
tI
t 95 V
tI
Q V
zz
3
tI 2
t 81 V
zz
4
t 2 h s
0 s
3
zz
w
I
Vt
2196 ds
2
s
t
2
h
ts t 95
t I
Vt
V
1
]
1
,
_
7/12/12
y
z
b
h
b-
t
h-
2t
( ) ( )
3
t 6878
12
t 2 h t b
12
bh
I
4 3 3
zz
7/12/12
( ) ( )
3
t 6878
12
t 2 h t b
12
bh
I
4 3 3
zz
zz
4
t 2 h s
0 s
3
zz
w
I
Vt
2196 ds
2
s
t
2
h
ts t 95
t I
Vt
V
1
]
1
,
_
7/12/12
y
z
s
1
( )
( )
result previous the checks which
t 95
2
t
2
h
bt t s Q
2
s
2
h
bs s Q
3
1 F
1
1 1 F
,
_
,
_
( )
zz zz
F
F
bI
t V
bI
t s Q V
3
1
95
7/12/12
y
z
zz
4
1
t s
0 s
1
1
zz
F
I 3
Vt 145
ds
2
s
2
h
bs
b I
Vb
V
1
1
1
]
1
,
_
( )
zz zz
F
F
bI
t V
bI
t Q V
3
95
( )
zz
3
zz
F
F
tI
t 95 V
tI
t Q V
7/12/12
zz
4
F
I 3
Vt 145
V
zz
w
I
Vt
V
4
2196
V
3
6878
I
Vt
2196
3
290
I
Vt
V V 2
zz
4
zz
4
w F
,
_
,
_
+ +
VF
VF
V
w
7/12/12
Limitations
The elementary shear theory is suitable for
determining vertical shear stresses in the web
portion only of a wide-flange beam
we can no longer assume constant shear stresses across
the width b
The shear formula cannot be used to determine
vertical shear stresses in the flanges
The distribution used in the I beam problem was
provided to show that the resultants of vertical shear
stresses in the flanges were 4% of the applied shear
force V.
Shear formula does give good results for the shear
stresses acting horizontally in the flanges.
7/12/12
Torsional Loads on Circular
Shafts
Interested in stresses and strains
of circular shafts subjected to
twisting couples or torques
Turbine exerts torque T on the
shaft
Shaft transmits the torque to the
generator
Generator creates an equal and
opposite torque T
7/12/12
( )
dA dF T
Net of the internal shearing stresses
is an internal torque, equal and
opposite to the applied torque,
Although the net torque due to the
shearing stresses is known, the
distribution of the stresses is not
Unlike the normal stress due to axial
loads, the distribution of shearing
stresses due to Torsional loads can not
be assumed uniform.
Distribution of shearing stresses is
statically indeterminate
must consider shaft deformations
7/12/12
The existence of the axial shear
components is demonstrated by
considering a shaft made up of axial
slats.
The slats slide with respect to each other
when equal and opposite torques are
applied to the ends of the shaft.
Torque applied to shaft produces
shearing stresses on the faces
perpendicular to the axis.
Conditions of equilibrium require the
existence of equal stresses on the
faces of the two planes containing the
axis of the shaft
7/12/12
From observation, the angle of twist
() of the shaft is proportional to the
applied torque and to the shaft length.
L
T
When subjected to torsion, every
cross-section of a circular shaft
remains plane and undistorted.
Cross-sections of noncircular (non
axisymmetric) shafts are distorted
when subjected to torsion.
Click to edit Master subtitle style
7/12/12
UNIT 2
TRANSLATIONAL
EQUILIBRIUM
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
Rotational Equilibrium : TRANSLATIONAL EQUILIBRIUM
The second condition for equilibrium is rotational equilibrium. We can see the need for this second
condition if we look at the diagram 1.3a.
In this diagram, if we apply the 1st condition of equilibrium and sum the forces in the y-direction,
we obtain zero. (+100 lb. - 100 lb. = 0).
This would indicate that the object is in translational equilibrium. However, we almost instinctively
recognise that the object certainly will not remain at rest, and will experience rotational motion
(and rotational acceleration).
Please notice that the object actually is in translational equilibrium. That is, even though it rotates, it
rotates about the center of mass of the bar, and the center of mass of the bar will not move.
The second condition for equilibrium states
that if we are to have rotational equilibrium,
the sum of the Torque acting on the
structure must be zero.
The 2nd condition for equilibrium may be written:
or in three dimensions:
,
,
7/12/12
Two painters are standing on a 300 Kg. scaffolding (beam) which is 12 m. long. One
painter weighs 160 Kg. and the second painter weighs 140 Kg. The scaffolding is
supported by two cables, one at each end. As they paint, the painters begin wondering
what force (tension) is in each cable.
The question is, what is the force (tension) in each cable when the painters are standing
in the positions shown.
(Notice that for a uniform beam or bar, as far as equilibrium conditions are concerned, the beam weight may be
considered to act at the center (of mass) of the bar.)
7/12/12
1. Draw a Free Body Diagram (FBD) showing and labeling all external forces acting
on the structure, and including a coordinate system.
Notice in the diagram to the right, we have shown the forces in the cables supporting
the beam as arrows upward, and labeled these forces TA and TB.
2. Resolve all forces into x and y-components. In this example, all the forces are
already acting in the y-direction only, so nothing more needs to be done.
3. Apply the (2-dimensional) equilibrium conditions:
(No external x-forces acting on the structure, so this equation gives no information.)
TA - 300 lb - 160 lb - 140 lb + TE = 0
We can't solve this equation, as there are two unknowns (TA and TE) and only one equation. We
obtain our second equation from the 2nd condition of equilibrium - sum of torque must equal zero.
7/12/12
Before we can sum torque we must first PICK A POINT, as we always calculate torque with
respect to a point (or axis). Any point on (or off) the structure will work, however some points
result in an easier equation(s) to solve.
As an example, if we sum torque with respect to point E, we notice that unknown force TE acts
through point E, and, if a force acts through a point, that force does not produce a torque with
respect to the point (since the perpendicular distance is zero).
Thus summing torque about point E will result in an equation with only one unknown, as shown
or -TA(12) +300 lb(6ft) + 160 lb(3 ft) + 140 lb(1 ft)
= 0
Where we determined each term by looking at the forces acting on the beam one by one, and
calculating the torque produced by each force with respect to the chosen point E
from: Torque = Force x perpendicular distance
(from the point E to the line of action of the force).
7/12/12
The sign of the torque is determined by considering which way the torque would cause the beam to
rotate, if the beam were actually pinned at the chosen point.
That is, if we look at the 160 Kg. weight of painter one (and ignore the other forces), the 160 Kg.
weight would cause the beam to start rotating counter clockwise (+), if the beam were pinned at
point E.
It is important to note that the sign of the torque depends on the
direction of the rotation it would produce with respect to the chosen
pivot point, not on the direction of the force. That is, the 160 Kg. force is
a negative force (downward) in the sum of forces equation, but it produces a
positive torque with respect to point E in the sum of torque equation.
or, TA 300 Kg 160 Kg -140 Kg + TE
= 0
or, -TA(12) +300 Kg(6 m) + 160 kg (3 m) + 140 Kg(1
m) = 0
TA = 201.67 Kg TE = 398
Kg.
What is the minimum cable strength required so that the painters could move
anywhere on the scaffolding safely? (Answer = 450 Kg.)
7/12/12
Moment of a force: The magnitude of the moment of a force:
MO: Magnitude of the moment of F around point O
d: Perpendicular distance from O to the line of action of F
M Fd
O
F
Line of Action of F
F
r
O
F1
d
Note: moving a force along its line of action does not change its moment
rF Fr Fd M ) ( Sin
0
7/12/12
Direction of the moment in 2-D:
The direction of the moment is given
by the right hand rule:
Counter Clockwise (CCW) is out of the page,
Clockwise (CW) is into the page.
Calculating the moment in 2-D using
components:
Moments add together as vectors.
Select a positive direction (CCW or CW),
then calculate each moment and
add them using the proper sign for each
term.
For example:
M F d F d CCW positive
O x y
+
1 2
d
1
F
Fx
Fy
d2
7/12/12
Moment of a force:
Moment of Force F around point O:
MO
7/12/12
Calculating the moment using rectangular components:
Resultant moment:
Mro
7/12/12
Moment of a force about a specified axis a-a: Ma
O: any point on a-a
7/12/12
Couple: C
Note: The moment of a couple does not depend on the point one takes the
moment about. In other words, a moment of a couple is the same about all
points in space.
7/12/12
Equivalent force systems: The basic idea:
Two force systems are equivalent if they result in the same resultant force
and the same resultant moment.
Moving a force along its line of action:
Moving a force along its line of action results in a new force system
which is equivalent to the original force system.
7/12/12
Moving a force off its line of action: If a force is moved off its line of action,
a couple must be added to the force system so that the new system
generates the same moment as the old system.
7/12/12
The resultant of a force and couple system:
For any point O, every force and couple system can be made equivalent to
a single force passing through O and a single couple.
The single force passing through O is equal to the resultant force of the original system,
and the couple is equal to the resultant moment of the original system around point O.
7/12/12
Note: All 2-D force systems can be reduced to a single force. To find the line
of action of the force, the moment of the original system must be forced to
be the same as the system with the single force.
7/12/12
Equivalent force systems: The wrench
A wrench is a force and couple system in which the force and couple are parallel.
Every force and couple system can be reduced to a wrench:
The perpendicular part of the resultant moment can be replaced by sliding the resultant force
along the line perpendicular to the plane of the resultant force and resultant couple.
What remains after this operation is a wrench which has a moment equal to the component
of the resultant couple parallel to the force.
7/12/12
7/12/12
When can one reduce a force and couple system to a single force?:
For a force and couple system if the resultant force and the resultant couple are perpendicular, then
one can find an equivalent system with a single force and no couple.
To obtain this system, move the resultant force a distance d along the line perpendicular to the
plane of the resultant force and resultant couple until the resultant force creates
a moment equivalent to the resultant couple.
Note: All 2-D force systems can be reduced to a single force.
To find the line of action of the force, the moment of the
original system
must be forced to be the same as the system with the single
force.
7/12/12
Determine the un stretched length of spring AC if a force P causes the angle for equilibrium.
Cord AB has length a. Given: P = 80 lb, = 60 deg, k =50 lb /ft, a = 2 ft, b= 2 ft.
7/12/12
A vertical force P is applied to the ends of cord AB of length a and spring AC. If the spring has an
un stretched length , determine the angle for equilibrium.
Given: P = 10 lb, = 2 ft, k=15 lb/ ft, a = 2 ft, b= 2 ft
7/12/12
Determine the mass of each of the two cylinders if they cause a sag of distance d when suspended
from the rings at A and B. Note that s = 0 when the cylinders are removed.
Given: d = 0.5 m, l1 = 1.5 m, l2 = 2 m, l3 = 1 m, k =100 N / m, g =9.81 m / s2.
7/12/12
Prove Lami's theorem, which states that if three concurrent forces are in equilibrium, each is
proportional to the sine of the angle of the other two; that is, P/sin = Q/sin = R/sin .
7/12/12
The mast OA is supported by three cables. If cable AB is subjected to tension T, determine the
tension in cables AC and AD and the vertical force F which the mast exerts along its axis on the
collar at A. Given: T = 500 N, a = 6 m, b = 3 m, c = 6 m, d = 3 m, e = 2 m, f = 1.5 m, g = 2 m
7/12/12
Replace the force system by a single force resultant and specify its point of application, measured
along the x axis from point O.
Given: F1 = 125 kg, F2 = 350 kg, F3 = 850 kg, a = 2 m, b = 6 m, c = 3 m, d = 4 m.
m
kg
7/12/12
Given the three non zero vectors A, B, and C, show that if A (BC) = 0, the
three vectors must lie in the same plane.
Consider,
A (BC) = A BC cos( )
= ( A cos( )) BC
= h BC
= BC h sin( )
= volume of parallelepiped.
If A (BC) = 0, then the volume equals zero, so that A, B, and C are
coplanar.
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Determine the magnitude and directional sense of the resultant moment of
the forces at A and B about point O. Given: F1 = 40 lb, F2 = 60 lb, 1 =
30 deg, 2 = 45 deg, a = 5 in, b = 13 in, c = 3 in, d = 6 in,
e = 3 in and f = 6 in.
7/12/12
Determine the magnitude and directional sense of the resultant moment of the forces at A
and B about point P. Units Used: kip = 1000 lb
Given: F1 = 40 lb, b = 13 in, F2 = 60 lb, c = 3 in, 1 = 30 deg, d = 6 in, 2 = 45 deg, e
= 3 in, a = 5 in and f = 6 in
7/12/12
Determine the magnitude and sense of the couple moment.
Units Used: kN = 1000 N.
Given: F = 5 kN, = 30 deg, a = 0.5 m, b = 4 m, c = 2 m, d = 1 m
7/12/12
Determine the magnitude and sense of the couple moment. Each force has a magnitude F.
Given: F = 65 kg, a = 2 m, b = 1.5 m, c = 4 m, d = 6 m, e = 3 m.
Kg- m Counter Clockwise
7/12/12
A clockwise couple M is resisted by the shaft of the electric motor. Determine the magnitude of
the reactive forces R and R which act at supports A and B so that the resultant of the two
couples is zero.
Given: a = 150 mm, = 60 deg, M = 5 Nm
7/12/12
The ends of the triangular plate are subjected to three couples. Determine the magnitude of the
force F so that the resultant couple moment is M clockwise.
Given: F1 = 600 N, F2 = 250 N, a = 1 m, = 40 deg, M = 400 Nm.
Initial Guess F = 1 N
7/12/12
Draw the free-body diagram of the sphere of weight W resting between the smooth inclined planes.
Explain the significance of each force on the diagram.
Given: W = 10 lb, 1 = 105 deg, 2 = 45 deg
NA, NB force of plane on sphere.
W force of gravity on sphere.
7/12/12
Draw the free-body diagram of the hand punch, which is pinned at A and bears down on the
smooth surface at B.
Given: F = 8 lb, a = 1.5 ft, b = 0.2 ft, c = 2 ft
Ax, Ay, MA effect of wall on beam.
NB force of roller on beam.
Wa / 2 resultant force of distributed load on beam.
Draw the free-body diagram of the beam supported at A by a fixed support and at B by a roller.
Explain the significance of each force on the diagram.
Given: w =40 lb / ft, a = 3 ft, b = 4 ft, = 30 deg
7/12/12
Draw the free-body diagram of the jib crane AB, which is pin-connected at A and supported by
member (link) BC. Units Used: kN = 1000 N
Given: F = 8 kN, a = 3 m, b = 4 m, c = 0.4 m, d = 3, e = 4.
7/12/12
Draw the free-body diagram of the uniform bar,
which has mass M and center of mass at G.
The supports A, B, and C are smooth.
Draw the free-body diagram of the
beam, which is pin-connected at A and
rocker-supported at B.
7/12/12
The drainpipe of mass M is held in the tines of
the fork lift. Determine the normal forces at A
and B as functions of the blade angle and
plot the results of force (ordinate) versus
(abscissa) for 0 90 deg.
The articulated crane boom has a weight W and
mass center at G. If it supports a load L,
determine the force acting at the pin A and the
compression in the hydraulic cylinder BC when
the boom is in the position shown
7/12/12
The platform assembly has weight W1 and center of gravity at G1. If it is intended to support a
maximum load W2 placed at point G2,,determine the smallest counterweight W that should be
placed at B in order to prevent the platform from tipping over.
Given: W1 = 250 lb, a = 1 ft, c = 1 ft, e = 6 ft, W2 = 400 lb, b = 6 ft, d = 8 ft, f = 2 ft
7/12/12
The man has weight W and stands at the center of the plank. If the planes at A and B are smooth,
determine the tension in the cord in terms of W and .
7/12/12
The telephone pole of negligible thickness is subjected to the force F directed as shown. It is
supported by the cable BCD and can be assumed pinned at its base A. In order to provide clearance
for a sidewalk right of way, where D is located, the strut CE is attached at C, as shown by the
dashed lines (cable segment CD is removed). If the tension in CD' is to be twice the tension in
BCD, determine the height h for placement of the strut CE. F = 80 , = 30, a = 30, b = 10
7/12/12
The mobile crane has weight W1 and center of gravity at G1; the boom has weight W2 and center
of gravity at G2. Determine the smallest angle of tilt of the boom, without causing the crane to
overturn if the suspended load has weight W. Neglect the thickness of the tracks at A and B.
Given: W1 =120000 lb, W2 =30000 lb, W =40000 lb, a = 4 ,b = 6 , c = 3 , d = 12, e = 15
7/12/12
The man attempts to support the load of boards having a weight W and a center of gravity at G. If
he is standing on a smooth floor, determine the smallest angle at which he can hold them up in the
position shown. Neglect his weight. Given: a = 0.5ft, b = 3ft, c = 4ft, d = 4 ft.
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
b
)
7/12/12
7/12/12
Mo = 1200
lb.in
F = 57.7
lb
F = 50
lb
OB = 10
in.
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
For the bracket and loading of Previous Problem , determine the smallest
distance a if the bracket is not to move.
7/12/12
7/12/12
7/12/12
Determine the magnitude of the force F that should be applied at the end of the lever such
that this force creates a clockwise moment M about point O.
Given: M = 15 Nm, = 60 deg, = 30 deg, a = 50 mm, b = 300 mm
7/12/12
Determine the direction ( 0 180) of the force F so that it produces (a) the maximum
moment about point A and (b) the minimum moment about point A. Compute the moment in
each case.
Given: F = 40 Kg, a = 8 m, b = 2 m
7/12/12
The rod on the power control mechanism for a business jet is subjected to force F.
Determine the moment of this force about the bearing at A.
Given: F = 80 N, 1 = 20 deg, a = 150 mm, 2 = 60 deg.
7/12/12
The boom has length L, weight Wb, and mass center at G. If the maximum moment that can be
developed by the motor at A is M, determine the maximum load W, having a mass center at G',
that can be lifted.
7/12/12
The tool at A is used to hold a power lawnmower blade stationary while the nut is being loosened
with the wrench. If a force P is applied to the wrench at B in the
direction shown, (a) Determine the moment it creates about the nut at C?
(b) What is the magnitude of force F at A so that it creates the opposite moment about C ?
Given: P = 50 N, a = 400 mm, b = 300 mm, = 60 deg, c = 5 and d = 12.
7/12/12
The force F acts on the end of the pipe at B.
Determine the angles ( 0 180 ) of
the force that will produce maximum and
minimum moments about point A.
What are the magnitudes of these moments?
Given: F = 70 N, a = 0.9 m, b = 0.3 m, c = 0.7 m
7/12/12
The towline exerts force P at the end of the
crane boom of length L. Determine the
placement x of the hook at A so that this force
creates a maximum moment about point O.
What is this moment?
Unit Used: kN = 1000 N
Given:
P = 4 kN, L = 20 m, = 30 deg
a = 1.5 m
7/12/12
Determine the resultant moment of the forces about point
A. Solve the problem first by
considering each force as a whole, and then by
using the principle of moments.
Units Used: kN = 1000 N
Given: F1 = 250 N, a = 2 m, F2 = 300 N, b = 3 m, d= 3,
F3 = 500 N, c = 4 m, 1 = 60 deg, 2 = 30 deg, e = 4
7/12/12
7/12/12
Determine the moment of the force F at A about point O. Express the result as a Cartesian
vector. Units Used: kN = 1000 N,
Given: F = 13 kN, a = 6 m, b = 2.5 m, c = 3 m, d = 3 m, e = 8 m, f = 6 m, g = 4 m, h = 8 m
7/12/12
Determine the smallest force F that must be applied along the rope in order to cause the curved
rod, which has radius r, to fail at the support C. This requires a moment to be developed at C of
magnitude M. Given: r = 5 ft, M = 80 lb ft, = 60 deg, a = 7 ft and b = 6 ft
7/12/12
The man pulls on the rope with a force F. Determine the moment that this force exerts about the
base of the pole at O. Solve the problem two ways, i.e., by using a position vector from O to A, then
O to B. Given: F = 20 N, a = 3 m, b = 4 m, c = 1.5 m d = 10.5 m
7/12/12
The force F is applied to the handle of the box wrench. Determine the component of the
moment of this force about the z axis which is effective in loosening the bolt.
Given: a = 3 in, b = 8 in and c = 2 in.
7/12/12
The cutting tool on the lathe exerts a force F on the shaft in the direction shown. Determine the
moment of this force about the y axis of the shaft. Units Used: kN = 1000 N
Given: a = 30 mm, = 40 deg
7/12/12
The bevel gear is subjected to the force F which is caused from contact with another gear.
Determine the moment of this force about the y axis of the gear shaft.
Given: a = 30 mm, b = 40 mm
7/12/12
The flex-headed ratchet wrench is subjected to force P, applied perpendicular to the handle as
shown. Determine the moment or torque this imparts along the vertical axis of the bolt at A.
Given: P = 16 Kg, a = 10 cm, = 60 deg, b = 0.75 cm.
Kg-m
Click to edit Master subtitle style
7/12/12
UNIT 2
FRAMES
NON TRUSS RIGID BODIES
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
In Diagram 1 we have shown a horizontal beam supported at point A by a roller and at point C by a pinned
support. Diagram 1a is the Free Body Diagram of the beam with the roller and the pinned joint now replaced
by the support forces which they apply on the beam. The roller applies the vertical force Ay and the pinned
support applies the forces Cx and Cy.
Diagram 2 above shows examples of supports and the types of forces and/or torque
which they may exert on a structure.
7/12/12
Axial Member is a member which is
only in simple tension or compression.
The internal force in the member is
constant and acts only along the axis of
the member.
If forces (no matter how many) act at
only Two Points on the member - it is
an axial member.
That is, the resultant of the forces must
be two single equal forces acting in
opposite directions along axis of the
member. See Diagram 3.
Non-Axial Member is a member which
is not simply in tension or compression.
It may have shear forces acting
perpendicular to the member and/or
there may be different values of tension
and compression forces in different
parts of the member.
A member with forces acting at More
Than Two Points (locations) on the
member is a non-axial member.
See Diagram 4.
7/12/12
Frames (non-truss, rigid body)
In this problem we wish to determine all the external support forces (reactions) acting on the
structure shown in Diagram 1 below. Once again our procedure consists basically of three steps.
1.Draw a Free Body Diagram of the entire structure showing and
labeling all external load forces and support forces, include any
needed dimensions and angles.
2. Resolve (break) all forces into their x and y-components.
3. Apply the Equilibrium Equations ( )
and solve for the unknown forces.
7/12/12
In our example, the load forces are already shown by the downward
arrows. We next look at the forces exerted on the structure by the
supports. Since each support is a pinned joint, the worst case we could
have is an unknown x and y-force acting on the structure at each support
point.
We also must choose directions for the x and y support forces.
In some problems the directions of the support forces are clear from the
nature of the problem. In other problems the directions the support forces
act is not clear at all. However, this is not really a problem. We simple
make our best guess for the directions of the support reactions. If our
guess is wrong, when we solve for the value of the support forces, that
value will be negative.
This is important. A negative value when solving for a force does not
mean the force necessarily acts in the negative direction, rather it
means that the force acts in the direction OPPOSITE to the one we
initially chose.
7/12/12
We can draw a better FBD by reflecting on the concept of axial and non-
axial members. Notice in our structure that member ABC is a non-axial
member (since forces act on it at more than two points), while member CD
is an axial member (since if we drew a FBD of member CD we would see
forces act on it at only two points, D and C). This is important. Since CD
is an axial member the force acting on it from the wall (and in it) must act
along the direction of the member. This means that at point D, rather than
having two unknown forces, we can draw one unknown force acting at a
known angle (force D acting at angle of 37o, as shown in Diagram 3).
This means we have only three unknowns, Ax, Ay, and D. In Diagram 3,
we have also completed
STEP I: This is an accurate FBD, but it is not the best. The difficulty is
that for our problem, we have three equilibrium conditions
( ), but we have four unknowns
(Ax, Ay, Dx, Dy) in this FBD. And as we are well aware, we can not solve
for more unknowns than we have independent equations.
7/12/12
Step II, breaking any forces not in the
x or y-direction into x and y-
components. Thus, in Diagram 3, we
have shown the two components of D
(which act at 37o), D cos 37o being the
x-component, and D sin 37o being the
y-component.
[Please notice that there are not three forces at point D, there is either D
acting at 37o or its two equivalent components, D cos 37o and D sin 37o.
In Diagram 3 at this point we really should cross out the D force, which
has been replaced by its components.]
7/12/12
Now before we proceed with the final step and determine the values of the
support reactions, we should deal with several conceptual questions which
often arise at this point. First, why can't we do at point A what we did at
point D, that is put in one force acting at a known angle. Member ABC is
a horizontal member, doesn't the wall just push horizontally on member
ABC, can't we just drop the Ay force? The answer is NO, because
member ABC is not an axial member, it is not simply in compression or
tension, and the wall does not just push horizontally on member ABC (as
we will see in our solution). Thus the best we can do at point A is
unknown forces Ax and Ay.
7/12/12
Now Step III. Apply the Equilibrium conditions.
Here we sum the x-forces, keeping track of their direction signs,
forces to right, +, to left, -
Sum of y-forces, including load forces, keeping track of direction signs.
A second question is often, what about the wall, aren't there forces acting
on the wall that we should consider? Well, yes and no. YES, there are
forces acting on the wall (as a matter of fact they are exactly equal and
opposite to the forces acting on the members, in compliance with
Newton's Third Law). But NO we should not consider them, because we
are making a FBD of the STRUCTURE, not of the wall, so we want to
consider forces which act on the structure due to the wall, not forces on
the wall due to the structure.
7/12/12
Sum of Torque about a point. We choose point A. Point D is also a good
point to sum torque about since unknowns act through both points A and
D, and if a force acts through a point, it does not produce a torque with
respect to that point. Thus our torque equation will have less unknowns in
it, and will be easier to solve. Notice that with respect to point A, forces
Ax, Ay, and D sin 37o do not produce torque since their lines of action
pass through point A. Thus in this problem the torque equation has only
one unknown, D. We can solve for force D, and then use it in the two
force equations to find the other unknowns, Ax and Ay. (Completing the
calculations, we arrive at the following answers.)
D = +7500 Ax = +6000 Ay = +1500.
Note that all the support forces we solved for are positive, which means
the directions we choose for them initially are the actual directions they
act. We have now solved our problem. The support force at point D is
7500 acting at 37o. The support forces at A can be left as the two
components, Ax = 6000 and Ay = 1500 , or may be added (as vectors)
obtaining one force at a known angle, as shown in Diagram 4.
7/12/12
Thus the force at point A is 6185 acting at 14o, as shown.
This information would help us purchase the correct size hinge (able to
support 6185 at A, and able to support 7500 at D), or estimate if the wall is
strong enough to support the structure.
7/12/12
Note: Both sides of the rope have 200 lb. force in them - one side due to
the load, and the other side due to the pull of the person. Point B must
support both the load and the pull of the person which results in a total
force of 400 lb. acting on point B.
At point A we have shown one unknown support force 'A' acting at a
known angle (37o). We can do this at point A since we know member AB
is an axial member. In an axial member the force is along the direction of
the member, thus the floor must exert a force on the member also along
the direction of the member (due to equal and opposite forces principle).
7/12/12
However, at point D, since member D is a non-axial member, the best we
can do is to show an unknown Dx and Dy support forces acting on the
structure at point D. Solving
A = +343 lb. Dx = +274 lb. Dy = +354 lb. We can find Resultant D =
Square Root [Dx2 + Dy2] = Square Root [(-274 lb)2 + (354 lb)2] =
447.7 lb. and Tangent (angle) = Dy/Dx = 354lb/-274 lb = -1.29, so
Angle = Arc Tangent (-1.29) = 127.8o (from x -axis) so support force at
Point D could also be expressed as: D = 447.7 lb. @ 127.8o .
Note: Force at D does not act along the direction of member BCD, which
it would do if BCD were an axial member.
7/12/12
E = +10,800 lb. Ax = +8620 lb. Ay = +13500 lb.
To determine the force in axial member CD: We draw a FBD, not of the entire
structure, but of a member of the structure, (choosing not the member we wish to
find the force in, but a member it acts on). Thus, if we wish to find the force in
member CD, we draw a FBD - not of member CD, but a member CD acts on, such as
member ABC, or member AD. We will use member ABC to find the force in member
CD.
7/12/12
Step 3: Apply the equilibrium conditions and solve for unknown forces.
Fx: ACx + CD cos 53.8o = 0
Fy: ACy -12,000 lb. + CD sin 53.8o = 0
TA: -12,000 lb. (4 ft) + CD sin 53.8o (8 ft ) =0
CD = 7440 lb ACx = - 4390 lb. ACy = 6000 lb.
(- sign shows force acts in opposite direction.),
7/12/12
The second good FBD of member ABC is shown in Diagram 4. What we
have done in this diagram is to look more closely at the left end of
member ABC and observe that the effect of the wall forces and the effect
of member AD, is to give some net x and y-force acting on member
ABC. Thus, rather than show both the wall forces and the force due to
AD on ABC, we simple show an ACx and an ACy force which is the net
horizontal and vertical force acting on ABC at the left end. This is fine to
do, as we are looking for force CD, and that is still present in our FBD.
This second FBD is slightly easier than the first in that it will result in
one less force (AD) in the equilibrium equations. We will use the second
FBD in the rest of the problem.
7/12/12
Point A: As an aside, notice that the forces ACx and ACy (The horizontal
and vertical forces acting on member ABC at end A.) are not the same as
the forces Ax and Ay acting on the entire structure at joint A. This results
since the forces of the wall at point A are not just acting on member ABC,
but are distributed to both members ABC and AD, as shown in Diagram 6.
Note in the diagram that if the forces ACx and ADx are summed (13010
lb. - 4390 lb. = 8620 lb.), and if forces ACy and ADy are summed (6000
lb. + 7500 lb. = 13500 lb.), that their vector sums equal the external forces
(Ax and Ay) acting on point A, as we expect they should.
7/12/12
In the structure shown below members AD, DC, and ABC are assumed to
be solid rigid members. Member ED is a cable. For this structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the values of all the support forces acting on the structure.
C. Determine the force (tension or compression) in member DC. Unless
otherwise indicated, all joints and support points are assumed to be
pinned or hinged joints.
7/12/12
STEP 1: Draw a free body diagram showing
and labeling all load forces and support
(reaction) forces, as well as any needed
angles and dimensions.
STEP 2: Break any forces not already
in x and y direction into their x and y
components.
STEP 3:
Apply the equilibrium conditions.
Sum Fx = -E cos (37o) + Ax = 0
Sum Fy = Ay + E sin (37o)
- 10,000 lbs - 8,000 lbs = 0
Sum TA = E cos (37o)(12ft)
- (10,000 lbs)(4 ft) - (8,000 lbs)(12ft) = 0
Solving for the unknowns: E = 14,200 lbs;
Ay= 9,480 lbs; Ax = 11,400 lbs
7/12/12
STEP 1: Draw a free body diagram of a member that DC acts on - member ABC.
STEP 2: Resolve all forces into x and y components (see diagram).
STEP 3: Apply the equilibrium conditions.
Fx = Acx - DC cos (56.3o) = 0
Fy = Acy - 10,000 - 8,000 + DC sin (56.3o) = 0
TA = (-10,000 )(4 ) - (8,000 )(12 ) +DC sin (56.3o)(12 ) = 0
Solving for the unknowns: DC = 13,600 ; Acx = 7,560 ; Acy = 6,670
These are external forces acting on member ABC.
The force in DC is 13,600 (c).
PART C: Now find internal force in member DC
7/12/12
EXERCISES: In the structure shown below member ABC is assumed to
be a solid rigid member. Member CD is a cable. For this structure: A.
Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force (tension ) in member CD. Unless otherwise
indicated, all joints and support points are assumed to be pinned or
hinged joints.
7/12/12
STEP 1: Draw a free body diagram showing and labeling all load forces and support (reaction)
forces, as well as any needed angles and dimensions.
STEP 2: Break any forces not already in x and y direction into their x and y components.
STEP 3: Apply the equilibrium conditions.
Sum Fx = -D cos (37o) + Ax = 0
Sum Fy = D sin (37o) + Ay - 10,000 lbs - 8,000 lbs = 0
Sum TA = (-10,000 lbs)(6.93 ft) - (8,000 lbs)(10.4 ft) + D sin (37o)(5.61 ft)
+ D cos (37o)(9.61 ft) = 0
Solving for the unknowns:
D = 13,800 lbs; Ax = 11,100 lbs; Ay = 9,710 lbs
PART C
Now find internal force in member DC.
In this problem member DC is a single axial
member connected to the wall at point D.
Therefore, the force in member DC is equal and
opposite the force exerted on DC by the wall.
From parts A and B, the force on DC due to the
wall is 13,800 lbs. Therefore, force in DC is also
13,800 lbs (in tension since DC is a cable).
7/12/12
Fig 2
In the structure shown Fig 2 members ABC, ADE, and DB are assumed to be
solid rigid members. Members ABC and ADE are pinned to the wall at point A.
Member ADE is supported by a roller at point E. For this structure: A. Draw a
Free Body Diagram showing all support forces and loads. B. Determine the value
of all the support forces acting on the structure. C. Determine the force (tension
or compression) in member DB. Unless otherwise indicated, all joints and
support points are assumed to be pinned or hinged joints.
7/12/12
STEP 1: Draw a free body diagram showing
and labelling all load forces and support
(reaction) forces, as well as any needed
angles and dimensions.
STEP 2: Break any forces not already in x
and y direction into their x and y components.
STEP 3: Apply the equilibrium conditions.
Sum Fx = Ex + Ax = 0
Sum Fy = Ay - 12,000 lbs = 0
Sum TA = Ex(8 ft) - (12,000 lbs)(12 ft) = 0
Solving for the unknowns: Ex= 18,000 lbs;
Ax= -18,000 lbs; Ay = 12,000 lbs
After Drawing the FBD of a member that DB acts on -
member ABC, and Resolving the Forces,
apply the equilibrium conditions.
Sum Fx = Acx + DB cos (33.7o) = 0
Sum Fy = Acy + DB sin (33.7o) - 12,000 lbs = 0
Sum TA = DB sin (33.7o)(6 ft) - (12,000 lbs)(12 ft) = 0
Solving for the unknowns:
DB = 43,300 lbs; Acx = -36,000 lbs; Acy = -12,000 lbs
These are external forces acting on member ABC.
The force in DB is 43,300 lbs (c).
7/12/12
In the structure shown below members ABC , BDE and CD are assumed to be solid rigid members.
The structure is pinned at A and supported by a roller at E. For this structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force (tension or compression) in member CD.
Unless otherwise indicated, all joints and support points are assumed to be pinned or
hinged joints.
7/12/12
STEP 1: Draw a free body diagram showing
And labelling all load forces and support
(reaction) forces, as well as any needed
angles and dimensions.
STEP 2: Break any forces not already
in x and y direction into x and y components.
STEP 3: Apply the equilibrium conditions.
Sum Fx = Ax = 0,
Sum Fy = Ay + Ey - 8,000 - 4,000 = 0
Sum TA = (-8,000 )(3 )
(4,000 )(6.5 ) + Ey(8.5 ) = 0
Solving for the unknowns:
Ey = 5,880 ; Ay = 6,120 .
PART C: Draw a free body diagram of a member
that CD acts on - member BDE.
Resolve all forces into x and y components
Apply the equilibrium conditions:
Sum Fx = -Bx + CD cos (60o) = 0
Sum Fy = By - CD sin (60o) - 4,000 + 5,880 = 0
Sum TB = -CD sin (60o)(3 ) - (4,000 )(5 )
+ (5,880 )(7 ) = 0
Solving for the unknowns:
CD = 8,140 ; Bx = 4,070 ; By = 5,170
These are the external forces acting on member BDE.
The force in CD is 8,140 (c).
7/12/12
Determine the reaction at supports A and B of the beam in the diagram shown. Neglect the weight
of the beam. Ans. (Ax = 938 lb., Ay = 728 lb., B = 814 lb.)
A brace is hinged at one end to a vertical wall
and at the other end to a beam 14ft long. The
beam weighs 250 lb. and is also hinged to a
vertical wall as shown. The beam carries load of
500 lb. at the free end. What will be the
compressive force in the brace, and what will be
the values of the vertical and horizontal
components of the reaction at hinge A?
Ans. (Ax = 596 lb., Ay = 45 lb., B = 994 lb.)
Problem 1
A pin-connected A-frame
supports a load as shown.
Compute the pin reactions at
all of the pins. Neglect the
weight of the members.
(Ay=1500 lb., Ey=1000 lb.,
Bx=1250 lb., By=1750 lb.,
Cx=1250 lb., Cy=250 lb., Dx
= 1250 lb., Dy=750 lb.,
directions not indicated)
7/12/12
The frame shown supports part of the roof of a small building. Knowing that the tension in the
cable is 150 kN, determine the reaction at the fixed end E.
Free-Body Diagram. A free-body diagram of the
frame and of the cable BDF is drawn. The reaction
at the fixed end E is represented by the force
components Ex and Ey and the couple ME.
The other forces acting on the free body are the four
20-kN loads and the 150-kN force exerted at end F of
the cable.
Equilibrium Equations.
Noting that DF
7/12/12
PROBLEM 4.2 Two children are standing on a diving board of mass 65 kg.
Knowing that the masses of the children at C and D are 28 kg and 40 kg,
respectively, determine
(a) the reaction at A, (b) the reaction at B.
7/12/12
Four boxes are placed on a uniform 14-kg wooden plank which rests on two sawhorses. Knowing
that the masses of boxes B and D are 4.5 kg and 45 kg, respectively, determine the range of values
of the mass of box A so that the plank remains in equilibrium when box C is removed.
7/12/12
For the beam shown determine the range of values of P for which the beam will be safe knowing
that the maximum allowable value of each of the reactions is 45 kips and that the reaction at A must
be directed upward.
A check must be made to verify the assumption that the maximum value of P is based on the
reaction force at A. This is done by making sure the corresponding value of B is < 45 kips.
7/12/12
Neglecting friction, determine the tension in cable ABD and the reaction at C ,
1. when =60., 2. when = 30.
For = 30
For = 60
7/12/12
A 200-lb crate is attached to the trolley-beam system shown. Knowing that a = 1.5 ft, determine (a)
the tension in cable CD, (b) the reaction at B. Similarly find if a = 3 ft.
Click to edit Master subtitle style
7/12/12
UNIT 2
TRUSS RIGID BODIES
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
Rigid Body Structures -
Trusses
A very common structure used in construction is a truss. An ideal truss is a structure
which is composed completely of (weightless) Axial Members that lie in a plane,
connected by pinned (hinged) joints, forming triangular substructures (within the main
structure), and with the external loads applied only at the joints. See Diagram 1. In real
trusses, of course, the members have weight, but it is often much less than the applied
load and may be neglected with little error. Or the weight maybe included by dividing
the weight in half and allowing half the weight to act at each end of the member. Also
in actual trusses the joints may be welded, riveted, or bolted to a gusset plate at the
joint. However as long as the centerline of the member coincide at the joint, the
assumption of a pinned joint maybe used. In cases where there are distributed loads on
a truss, these may be transmitted to a joint by use of a support system composed of
stringers and cross beams, which is supported at the joints and transmits the load to the
joints.
7/12/12
The procedure for determining the external support reactions acting on a truss is
exactly the same as the procedure for determining the support forces in non-truss
problems, however the method for determining the internal forces in members of a
truss is not the same. The procedures for finding internal forces in truss members are
Method of Sections and Method of Joints (either of which may be used), and in fact,
one must be very careful not to use these methods with non-truss problems as they will
not give correct results. In Diagram 1 we have a truss supported by a pinned joint at
Point A and supported by a roller at point D. A vertical load of 500 acts at point F, and
a horizontal load of 800 acts at Point C. For this structure we wish to determine the
values of the support reactions, and the force (tension/compression) in members BE,
BC, and EF.
For the first part, determining the external support reactions, we apply the normal static
equilibrium procedure:
7/12/12
I. Draw a Free Body Diagram of the entire structure showing and labeling
all external load forces and support forces, include any needed dimensions
and angles.
Note that at the pinned support point A, the best we can do is to put both
an unknown x and y support force, however at point D we only need a unknown
y support force since a roller can only be in compression and so must support
vertically in this problem.
II. Resolve (break) all forces into their x and y-components.
III. Apply the Equilibrium Equations ( )
and solve for the unknown forces.
(Sum of x-forces)
(Sum of y-forces)
7/12/12
Part 2
Once we have determined the values of the external support reactions, we may proceed
to determining the values of the forces in the members themselves, the internal forces.
In this first example, we will use Method of Joints to determine the force in the
selected members.
In Method of Joints, rather then analyse the entire structure, or even a member of the
structure, we rather examine the joint (pin or hinge) where members come together. As
the structure is in static equilibrium, so the pin or joint will be in static equilibrium, and
we may apply the static equilibrium conditions (and procedure) to solve for the forces
on the joint(s) due to the members, which will also equal the forces in the axial
members - due to Newton's third law of equal and opposite reactions (forces).
There are several points to keep in mind as we use method of joints.
One is that since we are analysing a point (joint) rather then an extended body, our sum
of torque equation will be of no help. That is, since all the forces pass through the same
point, they have no perpendicular distance to that point and so produce no torque. This
means that to solve completely for the forces acting on a joints we must have a
joint which has, at most, two unknown forces acting.
In our example (Diagram 2), we notice that there are only two joints which initially
have only two unknowns acting - Joint A and Joint D.
Thus, we start our process at one of these. Let us begin with Joint A.
7/12/12
Step 1. FBD of the Joint A, showing and labeling all forces acting on the joint.
Include needed angles.
In Diagram 3 we have shown Joint A with the all the forces which act on the joint. The
forces on Joint A, due to members AB and AE, act along the directions of the members
(since the members are axial). We choose directions for AB and AE (into or out of the
joint). When we solve for the forces AB and AE, if these values are negative it means
that our chosen directions were incorrect and the forces act in the opposite direction. A
force acting into the joint due to a member means that member is in compression. That
is, if a member of a truss is in compression, it will push outward on it ends - pushing
into the joint. And likewise, if a truss member is in tension, it will pull outward on the
joint. In Diagram 3, we have assumed member AB is in compression, showing its
direction into the joint, and that member AE is in tension, showing it acting out of the
joint.
[A little consideration will show that we have
actually chosen AB in an incorrect direction. We
can see this if we consider the y-component of AB,
which clearly will be in the - y direction. However,
the y-support reaction, 33, is also in the -y
direction. There are no other y-forces on the joint,
so it can not be in equilibrium if both forces act in
the same direction. We will leave AB as chosen to
see, if indeed, that the solution will tell us that AB
is in the wrong direction.]
7/12/12
Step 2: Resolve (Break) all forces into their x and y components.
Step 3: Apply the Equilibrium Conditions:
(Sum of x-forces)
(Sum of y- forces)
Solving: AE = 756 (Tension), AB = -55 .
(The negative sign indicates we selected an incorrect initial direction for AB, AB is in
Tension, not Compression.)
Remember, we are trying to find the forces in members BE,
BC, and EF. Now that we have the forces in members AE
(756 tension) and AB (55 tension), we can move unto a
second joint (joint B) and find two of the unknowns we are
looking for. We could not have solved for the forces acting
at joint B initially, since there were three unknowns
(initially) at joint B (AB, BC, and BE). However now that
we have analysed joint A, we have the value of the force in
member AB, and can proceed to joint B where we will now
have only two unknowns to determine (BE & BC)
7/12/12
Joint B: Procedure - Method of Joints
Step 1. FBD of the Joint B, showing and labeling all forces acting on the joint.
Include needed angles.
Step 2: Resolve (Break) all forces into their x and y components.
Step 3: Apply the Equilibrium Conditions:
In Diagram 5, we have on the left the FBD of joint B with all external forces acting on
the joint shown, and our initial direction for the forces. If the directions we chose for
the unknowns are correct, their values will be positive in the solution. If a value is
negative it means the force acts in the opposite direction. On the right side of Diagram
5 is the FBD with all forces resolved into x and y-components. We now apply the
Equilibrium Conditions (for joints).
7/12/12
(Sum of x-forces)
(Sum of y-forces)
Solving : BC = 44 (Tension) BE = 33 (Compression)
Finally, we can now proceed to analyse joint E and determine the force in member EF.
Joint E: Procedure - Method of Joints
Step 1. FBD of the Joint E, showing and labeling all forces acting on the joint.
Include needed angles.
Step 2: Resolve (Break) all forces into their x and y components.
Step 3: Apply the Equilibrium Conditions:
7/12/12
In Diagram 6, we have on the left, the FBD of joint E with all external forces acting on
the joint shown, and our initial direction for the forces. If the directions we chose for
the unknowns are correct, their values will be positive in the solution. If a value is
negative it means the force acts in the opposite direction. The right hand drawing in
Diagram 6 is the FBD of joint E with all forces resolved into x and y-components.
We now apply the Equilibrium Conditions (for joints).
(Sum of y-forces)
Solving : EC = 55 (Tension) EF = 712 (Tension)
Since both force values came out positive in our solution, this means that the initial
directions selected for the forces were correct. We have now solved our problem,
finding both the external forces and forces in members BE, BC, and EF (and along the
way, the forces in several other members - See Diagram 7 )
(Sum of x-forces)
7/12/12
We will use the same truss and solve for several
internal forces by Method of Sections. And
since we previously solved for the external
support reactions, we will not repeat that
portion, but begin with the external support
forces given and move to determine the internal
forces in the selected members.
In Method of Sections, we will 'cut' the truss into two sections by drawing a line
through the truss. This line may be vertical, horizontal, at some angle, or even curved
depending on the problem. The criteria for this line is that we would like to cut through
the unknown members (whose internal force value we wish to determine), but not to
cut through more than three unknowns (since we will have three equilibrium conditions
equations, we can only solve for three unknowns). In this example, cutting the truss
once will enable us to find our selected unknowns, however, in some trusses, or for
finding more internal forces, one may have to repeat Method of Sections several times
to determine all the unknowns.
7/12/12
I. Draw a Free Body Diagram of the structure (section), showing and labeling all
external forces, and indicating needed dimensions and angles. (Diagram 3)
II. Resolve (break) all forces into their x and y-components.
III. Apply the Equilibrium Equations :
and solve for the unknown forces.
(Here we sum the x-forces)
(Sum of y-forces, including load forces.)
(Sum of Torque with respect to point E.)
Solving we obtain: BC = 44 (T), EC = -50 (T), EF = 712 (T) (The negative sign for
force EC means that we initially chose it in the incorrect direction. EC acts out of the
section and so is in tension, not into the section as shown in the FBD). Thus, we have
solved for the internal forces in the members BC, EC, and EF by method of sections.
7/12/12
The structure shown in Diagram 1 is a truss which is pinned to the floor at point A, and
supported by a roller at point D. For this structure we wish to determine the value of all
the support forces acting on the structure, and to determine the force in member FC by
method of joints.
For the first part of the problem we proceed using our normal static's procedure.
STEP 1: Draw a free body diagram showing and labeling all load forces and
support (reaction) forces as well as any needed angles and dimensions.
(Note in Diagram 2, we have replaced the pinned support by an unknown x and y force
(Ax , Ay), and replaced the roller support by the vertical unknown force Dy.
7/12/12
STEP 2: Break any forces not already in x and y direction into their
x and y components.
STEP 3: Apply the equilibrium conditions
Ax =
0
Ay + Dy - 12,000 lbs - 20,000 lbs = 0
:
(-12,000 lbs)(4 ft) - (20,000 lbs)(12 ft) + Dy(24 ft) =
0
Solving for the unknowns: Dy = 12,000 lbs; Ay = 20,000 lbs.
These are the external support reactions acting on the structure.
7/12/12
PART 2: Determine the internal force in member FC by method of joints. We begin at
a joint with only two unknowns acting, joint D.
JOINT D:
STEP 1: Draw a free body diagram of the joint, showing and labeling all external
forces and load, and including any needed angles.(Diagram 3) We select an initial
direction for the unknowns, if their solution value is negative they act in a direction
opposite to the direction initially selected.
STEP 2: Resolve all forces into
x and y components. (Diagram 3).
STEP 3: Apply equilibrium conditions:
-CD + ED cos (66.4o) = 0
12,000 lbs - ED sin (66.4o)= 0
Solving for the unknowns: ED = 13,100 lbs (C); CD = 5,240 lbs (T)
Now that we have calculated the values for ED and CD we can move to joint E.
We could not solve joint E initially as it had too many unknowns forces acting on it.
7/12/12
JOINT E:
STEP 1: Draw a free body diagram of the joint, showing and labeling all external
forces and loads, and including any needed angles. (Diagram 4) We select an initial
direction for the unknowns, if their solution value is negative they act in a direction
opposite to the direction initially selected.
STEP 2: Resolve all forces into x and y components. (Diagram 4).
STEP 3: Apply equilibrium conditions:
FE -(13,100 lbs) cos (66.4o) - CE cos (66.4o) = 0
(13,100 lbs) sin (66.4o) - CE sin (66.4o) =
0
Solving for the unknowns: FE = 10,500 lbs (C); CE = 13,100 lbs (T)
(Since force values were positive, the initial direction chosen for the forces was
correct.)Now that we have calculated the values for FE and CE we move to joint C.
We could not solve joint C initially as it had too many unknowns forces acting on it.
7/12/12
JOINT C:
STEP 1: Draw a free body diagram of the joint, showing and labeling all external
forces and loads, and including any need angles. (Diagram 5) We select an initial
direction for the unknowns, if their solution value is negative they act in a direction
opposite to the direction initially selected.
STEP 2: Resolve all forces into x and y components. (Diagram 5).
STEP 3: Apply equilibrium conditions:
5,450 + (13,100 lbs) cos (66.4o) + FC cos (66.4o) - BC = 0
13,100 lbs sin (66.4o) - FC sin (66.4o) = 0
Solving for the unknowns: FC = 13,100 lbs (c); BC = 15,950 lbs (t)
Thus, member FC is in compression with a force of 13, 100 lbs.
7/12/12
The structure shown in Diagram 1 is a truss which is pinned to the floor at point A, and
supported by a roller at point H. For this structure we wish to determine the value of all
the support forces acting on the structure, and to determine the force in member DG by
method of sections.
We begin by determining the external support reactions acting on the structure.
STEP 1: Draw a free body diagram showing and labeling all load forces and
support (reaction) forces, as well as any needed angles and dimensions.
(Note in Diagram 1, we have replaced the pinned support by an unknown x and y force
(Ax , Ay), and replaced the roller support by the vertical unknown force Hy )
STEP 2: Break any forces not already in x and y direction into their x and y
components. (All forces in x/y directions.)
STEP 3: Apply the equilibrium conditions.
7/12/12
: Ax = 0 : Ay + Hy -12,000 lbs - 20,000 lbs - 10,000 lbs =
0
(-12,000 lbs)(20 ft)- (20,000 lbs)(40 ft)- (10,000 lbs)(60 ft)+ Hy(80 ft)=
0
Solving for the unknowns: Ay = 21,500 lbs; Hy = 20,500 lbs.
These are the external support reactions acting on the structure.
Part 2: Now we will find internal force in member DG by method of sections.
Cut the truss vertically with a line passing through members DF, DG, and EG. We
have shown the section of the truss to the right of the cut. We now treat this section
of the truss as if it were a completely new structure.
The internal forces in members DF, DG, and EG now become external forces with
respect to this section. We have represented these forces with the arrows shown. The
forces must act along the direction of the cut member (since all members in a truss
are axial members), and we have selected an initial direction either into or away from
the section for each of the forces.
If we have selected an incorrect initial direction for a force, when we solve for the
value of the force, the value will be negative indicating the force acts in the opposite
direction of the one chosen initially. We may now proceed with the analysis of this
structure using standard Static's techniques.
7/12/12
I. Draw a Free Body Diagram of the structure (section), showing and labeling all
external forces, and indicating needed dimensions and angles. (Diagram 2)
II. Resolve (break) all forces into their x and y-components. (Diagram 2)
III. Apply the Equilibrium Equations (
)
EG + DG cos (51.3o) + DF cos (22.6o) = 0
-10,000 lbs + 20,500 lbs - DG sin (51.3o) - DF sin (26.6o) = 0
-DF cos (26.6o)(15 ft) + (20,500 lbs)(20 ft) = 0
Solving for the unknowns: DF = 30,600 lbs (C); DG = -4,090 (opposite direction)=
4,090 lbs (T); EG = -24,800(opposite direction)= 24,800 lbs (T)
7/12/12
The structure shown below is a truss which is pinned to the wall at point F, and
supported by a roller at point A. For this structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force (tension or compression) in member EB by method of joints.
Unless otherwise indicated, all joints and support points are assumed to be
pinned or hinged joints.
7/12/12
PARTS A & B:
STEP 1 : Draw a free body diagram showing and labeling all load forces and
support (reaction) forces, as well as any needed angles and dimensions.
STEP 2: Break any forces not already in x and y direction into their x and y components
STEP 3: Apply the equilibrium conditions.
Sum Fx = Ax + Fx = 0
Sum Fy = Fy - 8,000 lbs - 6,000 lbs = 0
Sum TA = (-8,000 lbs)(8 ft) - (6,000 lbs)(16 ft) - Fx(10 ft) = 0
Solving for the unknowns: Ax = 16,000 lbs; Fx = -16,000 lbs; Fy = 14,000 lbs
PART C - Now find internal force in member EB by method of joints.
JOINT F:
STEP 1: Draw a free body diagram of the joint.
STEP 2: Resolve all forces into x and y components
(see diagram).
STEP 3: Apply equilibrium conditions:
Sum Fx = FE - 16,000 lbs = 0
Sum Fy = 14,000 lbs - FA = 0
Solving for the unknowns:
FE = 16,000 lbs (t); FA = 14,000 lbs (t)
7/12/12
JOINT A:
STEP 1: Draw a free body diagram of the joint.
STEP 2: Resolve all forces into x and y components (see diagram).
STEP 3: Apply equilibrium conditions:
Sum Fx = 16,000 lbs - AB -AE cos (68.2o) = 0
Sum Fy = 14,000 lbs - AE sin (68.2o) = 0
Solving for the unknowns: AE = 15,080 lbs (c); AB = 10,400 lbs (c)
JOINT E:
STEP 1: Draw a free body diagram of the joint.
STEP 2: Resolve all forces into x and y components (see diagram).
STEP 3: Apply equilibrium conditions:
Sum Fx = -16,000 lbs + ED + 5,600 lbs + EB cos (68.2o) = 0
Sum Fy = 14,000 lbs - EB sin (68.2o) = 0
Solving for the unknowns: ED = 4,800 lbs (t); EB = 15,080 lbs (t)
7/12/12
The structure shown below is a truss which is pinned to the wall at point E, and
supported by a roller at point A. For this structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force in member GC by method of sections.
Unless otherwise indicated, all joints and support points are assumed to be pinned
or hinged joints.
7/12/12
PARTS A & B:
STEP 1: Draw a free body diagram showing and labeling all load forces and support
(reaction) forces, as well as any needed angles and dimensions.
STEP 2: Break any forces not already in x and y direction into their x & y components
STEP 3: Apply the equilibrium conditions. Sum Fx = Ex = 0
Sum Fy = Ay + Ey - 12,000 lbs - 6,000 lbs =0, Sum TE = (12,000 lbs)(4 ft) - Ay(12
ft)= 0
Solving for the unknowns: Ey = 14,000 lbs; Ay = 4,000 lbs.
PART C: - Now find the internal force in member GC by method of section
STEP 1: Cut the structure into "2 sections" with a vertical line which cuts through
members GE, GC and BC, and is just to the right of point G (see diagram). The internal
forces in members GE, GC and BC now become external forces acting on the left hand
section as shown. (We chose directions for these forces which may or may not be
correct, but which will become clear when we solve for their values.)
7/12/12
STEP 2: Now treat the section shown as a new structure and apply statics procedure
- Draw a free body diagram of the left hand section.
- Resolve all forces into x an y components (see diagram).
- Apply equilibrium conditions:
Sum Fx = - GE cos (37o) + GC cos (37o) + BC = 0
Sum Fy = 4,000 lbs - GE sin (37o) - GC sin (37o) = 0
Sum TG = (-4,000 lbs)(4 ft) + BC(3 ft) = 0
Solving for the unknowns: BC = 5,330 lbs; GE = 6,670 lbs; GC = 0 lbs
The structure shown below is a truss which is pinned to the floor at point D, and
supported by a roller at point A.
For this structure:
A. Draw a Free Body Diagram showing
all support forces and loads.
B. Determine the value of all the support
forces acting on the structure.
C. Determine the force in member GC by
method of joints.
Unless otherwise indicated, all joints and support
points are assumed to be pinned or hinged joints.
Ans: GC = 730 lbs (t)
7/12/12
The structure shown below is a truss which is pinned to the floor at point A and also at point H. For this
structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force in member FB by any method.
Unless otherwise indicated, all joints and support points are assumed to be pinned or hinged joints.
Ans: FB = 12,8000 lbs (t)
The structure shown below is a truss which is pinned to the floor at point
A and supported by a roller at point F. For this structure:
A. Draw a Free Body Diagram showing all support forces and loads.
B. Determine the value of all the support forces acting on the structure.
C. Determine the force in member CD by any method.
Unless otherwise indicated, all joints and support points are
assumed to be pinned or hinged joints. Ans: CD = 43 lbs (c)
7/12/12
Determine the force in each member of the truss and state if the members are in tension or
compression. Units Used: kN = 1000 N, Given: P1 = 7 kN, P2 = 7 kN, = 45 deg.
Joint A: FAB + FAD cos( ) = 0
P1 FAD sin( ) = 0
Joint D:
FDB cos( ) FAD cos( ) + FDC cos( ) = 0
(FAD + FDB FDC)sin( ) P2 = 0
Joint C: FCB + FDC sin( ) = 0
7/12/12
The truss, used to support a balcony, is subjected to the loading shown. Approximate each joint as a
pin and determine the force in each member. State whether the members are in tension or
compression. Given: P1 = 600 lb, P2 = 400 lb, a = 4 ft, = 45 deg
Joint A: FAB + FAD cos( ) = 0
P1 FAD sin( ) = 0
Joint B: FBC FAB = 0
P2 FBD = 0
Joint D: (FDC FAD)cos( ) + FDE = 0
(FDC + FAD)sin( ) + FBD = 0
7/12/12
Determine the force in each member of the truss and state if the members are in tension or
compression. Given:P1 = 20 kN, P2 = 10 kN, a = 1.5 m, e = 2 m
7/12/12
7/12/12
Determine the force in each member of the truss and state if the members are in tension or
compression. Given: F1 = 3 kN, F2 = 8 kN, F3 = 4 kN, F4 = 10 kN , a = 2 m, b = 1.5 m
7/12/12
7/12/12
The maximum allowable tensile force in the members of the truss is Tmax, and the maximum
allowable compressive force is Cmax. Determine the maximum magnitude P of the two loads that
can be applied to the truss. Given: Tmax = 1500 lb, Cmax = 800 lb
7/12/12
7/12/12
Determine the force in each member of the truss and
state if the members are in tension or compression.
P1 = 10 kN, P2 = 15 kN, a = 2 m, b = 4 m, c = 4 m
7/12/12
7/12/12
Determine the force in each member of the truss in terms of the load P and state if the members are
in tension or compression.
7/12/12
7/12/12
Determine the force in each member of the truss in terms of the external loading and state if the
members are in tension or compression.
7/12/12
Determine the force in each member of the truss and state if the members are in tension or
compression. P1 = 4 kN, P2 = 0 kN, a = 2 m, = 15 deg
7/12/12
The Fink truss supports the loads shown. Determine the force in each member and state if the
members are in tension or compression. Approximate each joint as a pin.
Given: F1 = 500 lb, a = 2.5 ft, F2 = 1ooo lb, = 30 deg, F3 = 1ooo lb
7/12/12
7/12/12
7/12/12
7/12/12
Determine the force in each member of the Pratt bridge truss shown. State whether each member is
in tension or compression. Assume that the load at G has been removed.
Fx=0: Ax=0 , Fy =0:Ay6 kN6 kN+4.5 kN=0, Ay = 7.5 kN
MA=0:(12 m)Hy(6 m)(6 kN) (3 m)(6 kN) = 0 , Hy = 4.5 kN
7/12/12
By inspection of joint G: FFG = 0 and FEG =FGH =3.38 kN (T)
By inspection of joint D:
7/12/12
A Warren bridge truss is loaded as shown. Determine the force in members CE, DE, and DF.
Click to edit Master subtitle style
7/12/12
UNIT 5
Torsion of circular shaft and
power transmitted by shaft ,
Combined bending and torsion on
circular shaft Equivalent BM and
equivalent twisting moment
Prof. Dr. R. Chandra Sekaran Ph.D (C. Engg)
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Click to edit Master subtitle style
7/12/12
EXTRA
Strain Energy for Axial
load,
Bending and Torsion,
Castigliono's theorem -
Application
Prof. Dr. R. Chandra Sekaran Ph.D (C.Engg)
7/12/12
The principle of superposition is a central concept in the analysis of
structures. This is applicable when there exists a linear relationship between
external forces and corresponding structural displacements. The principle of
superposition may be stated as the deflection at a given point in a
structure produced by several loads acting simultaneously on the
structure can be found by superposing deflections at the same point
produced by loads acting individually.
Fig. 1 Cantilever loaded with two
concentrated loads
7/12/12
Consider an elastic spring as shown in the Fig.2 . When the spring is slowly
pulled, it deflects by a small amount . When the load is removed from the
spring, it goes back to the original position. When the spring is pulled by a
force, it does some work and this can be calculated once the load-
displacement relationship is known. It may be noted that, the spring is a
mathematical idealisation of the rod being pulled by a force P axially. It is
assumed here that the force is applied gradually so that it slowly increases
from zero to a maximum value P. Such a load is called static loading, as there
are no inertial effects due to motion. Let the load-displacement relationship be
as shown in Fig. 3.
Now, work done by the external force may be calculated as,
The area enclosed by force-displacement
curve gives the total work done by the
externally applied load. Here it is assumed
that the energy is conserved i.e. the work
done by gradually applied loads is equal to
energy stored in the structure. This internal
energy is known as strain energy. Now
strain energy stored in a spring is
Fig. 2 Linear Spring
Fig. 3 Force Displacement relation
7/12/12
In SI system, the unit of work and energy is the joule (J), which is equal to one
Newton metre (N.m). The strain energy may also be defined as the internal
work done by the stress resultants in moving through the corresponding
deformations. There are normal stresses ( ), and shear stresses (
), acting on an element. Corresponding to normal and shear
stresses we have normal and shear strains. Now strain energy may be written
as,
in which T is the
transpose
of the stress column
vector ,
The strain energy may be further classified as
elastic strain energy and inelastic strain energy as
shown in Fig. 5
The shaded area BCD is known as the elastic strain
energy.
Strain energy = Complementary strain energy
Consider a member of constant cross
sectional area A, subjected to axial force
Pas shown in Fig. . Let E be the Youngs
modulus of the material. Let the member
be under equilibrium under the action of
this force, which is applied through the
centroid of the cross section. Now, the
applied force P is resisted by uniformly
distributed internal stresses given by
average stress
Fig. 4 Infinitesimal element
Fig. 5 Elastic and Inelastic strain
energy
7/12/12
The work done by external
loads
The external work is stored as
the internal strain energy.
Hence, the strain energy stored
in the bar in axial deformation is,
The incremental elongation du of small element of length dx of beam is given
by,
The total elongation of the member of length L may be obtained by integration
(5)
(1)
(2)
(3
)
(4
)
Substituting equation (2) in (4) we get,
Strain energy under axial
load
Fig. 6 Axially loaded beam and an
element
7/12/12
Strain energy due to
bending
Consider a prismatic beam subjected to loads as shown in the Fig.7. The loads
are assumed to act on the beam in a plane containing the axis of symmetry of
the cross section and the beam axis. It is assumed that the transverse cross
sections, which are perpendicular to centroidal axis, remain plane and
perpendicular to the centroidal axis of beam.
Fig. 7 Bending
Deformation
7/12/12
Consider a small segment of beam of length subjected to bending moment as
shown in the Fig. 7. Now one cross section rotates about another cross section
by a small amount d. From the figure,
where R is the radius of curvature of the bent beam and EI is the flexural
rigidity of the beam. Now the work done by the moment M while rotating
through angle d will be stored in the segment of beam as strain energy dU.
Hence,
Substituting for d in equation (7), we
get,
(6)
(7)
(8)
Now, the energy stored in the complete beam of span L may be obtained by
integrating equation (8). Thus,
(9)
7/12/12
Strain energy due to transverse
shear
The shearing stress on a cross section of
beam of rectangular cross section may be
found out by the relation
where Q is the first moment of the portion of the cross-sectional area above
the point where shear stress is required about neutral axis, V is the transverse
shear force, b is the width of the rectangular cross-section and Izz is the
moment of inertia of the cross-sectional area about the neutral axis. Due to
shear stress, the angle between the lines which are originally at right angle will
change. The shear stress varies across the height in a parabolic manner in the
case of a rectangular cross-section. Also, the shear stress distribution is
different for different shape of the cross section. However, to simplify the
computation shear stress is assumed to be uniform (which is strictly not
correct) across the cross section. Consider a segment of length ds subjected to
shear stress .
The shear stress across the cross section may be taken as
(10)
(11)
in which A is area of the cross-section and is k the form
factor
which is dependent on the shape of the cross section.
Fig. 8 Shearing
Deformation
7/12/12
the deformation du as
Where is the shear strain and is
given by
The total deformation of the beam due to the action of shear force is
Now the strain energy stored in the beam due to the action of transverse shear
force is given by,
The strain energy due to transverse shear stress is very low compared to strain
energy due to bending and hence is usually neglected. Thus the error induced
in assuming a uniform shear stress across the cross section is very small.
(12)
(13)
(14)
(15)
(16)
7/12/12
Strain energy due to
torsion
Consider an elemental length ds of
the shaft. Let the one end rotates by a
small amount d with respect to
another end.
Now the strain energy stored in the
elemental length is,
We know
that
where, G is the shear modulus of the shaft material and J is the polar
moment of area.
Substituting for d from (18) in equation (16), we obtain
(17)
(18)
(19)
The total strain energy stored in the beam may be obtained by integrating
equation (19)
Hence the elastic strain energy stored in a member of
length s
(it may be curved or straight) due to axial force, bending
moment, shear force and torsion is summarised below.
Fig. 9 Torsional
Deformation
(20)
(20)
(16)
(5
)
(9
)
7/12/12
Castiglianos first theorem is being used in structural analysis for finding
deflection of an elastic structure based on strain energy of the structure. The
Castiglianos theorem can be applied when the supports of the structure are
unyielding and the temperature of the structure is constant. For linearly elastic
structure, where external forces only cause deformations, the complementary
energy is equal to the strain energy. For such structures, the Castiglianos first
theorem may be stated as the first partial derivative of the strain energy of
the structure with respect to any particular force gives the displacement of the
point of application of that force in the direction of its line of action.
Fig. 9 Simply supported beam with
loadings
7/12/12
Let be the forces P1, . acting at x1, , , ,
from the left end on a simply supported beam of span L . Let u1 , ..
be the displacements at the loading points respectively as shown in Fig.9 .
Now, assume that the material obeys Hookes law and invoking the principle of
superposition, the work done by the external forces is given by
P
2
P
3
P
n
x
2
x
3
x
n
u2
,
u
3
u
n
Work done by the external forces is stored in the structure as strain energy in
a conservative system. Hence, the strain energy of the structure is,
Displacement u1 below point P1 is due to the action of P1 , P2 , P3 ........
Pn acting at distances respectively from left support.
Hence, u1 may be expressed as,
In
general,
where is the flexibility coefficient at i due to unit force applied at j.
Substituting the values of in equation (22) from equation (24), we
get,
(21)
(22)
(23)
(24)
From Maxwell- Bettis reciprocal theorem Hence, equation (25) may be
simplified as,
(25)
(26)
7/12/12
Equation (27) is nothing but displacement u1 at the loading point.
(27)
Now, differentiating the strain energy with any force P1 gives,
In
general,
Hence, for determinate structure within linear elastic range the partial
derivative of the total strain energy with respect to any external load is equal
to the displacement of the point of application of load in the direction of the
applied load, provided the supports are unyielding and temperature is
maintained constant.
This theorem is advantageously used for calculating deflections in elastic
structure.
(28)
7/12/12
Find the displacement and slope at the tip of a cantilever beam loaded as in
Fig. Assume the flexural rigidity of the beam EI to be constant for the beam.
Moment at any section at a distance x
away from the free end is given by
Strain energy stored in the beam due to
bending is
Substitutin
g
Now, according to Castiglianos theorem, the first partial derivative of strain
energy with respect to external force P gives the deflection at A in the
direction of applied force. Thus,
To find the slope at the free end, we need to differentiate strain energy with
respect to externally applied moment M at A. As there is no moment at A,
apply a fictitious moment M 0 at A. Now moment at any section at a distance
x away from the free end is given by
7/12/12
Now, strain energy stored in the beam may be calculated as,
Taking partial derivative of strain energy with respect to M 0 , we get slope at
A.
But actually there is no moment applied at A.
Hence substitute = 0 in equation we get the slope at A.
M
0
7/12/12
A cantilever beam which is curved in the shape of a quadrant of a circle is
loaded as shown in Fig. The radius of curvature of curved beam is R, Youngs
modulus of the material is E and second moment of the area is I about an axis
perpendicular to the plane of the paper through the centroid of the cross
section. Find the vertical displacement of point A on the curved beam.
The bending moment at any section of the
curved beam is given by
Strain energy U stored in the curved beam due
to bending is,
Differentiating strain energy with respect to
externally applied load, P we get
7/12/12
Castiglianos Second
Theorem
In any elastic structure having n independent displacements
corresponding to external forces along their lines of action, if
strain energy is expressed in terms of displacements then n equilibrium
equations may be written as follows.
The strain energy of an elastic body may be
written as
We
know
where is the stiffness coefficient and is defined as the force at i due to unit
displacement applied at j. Hence, strain energy may be written as,
From Maxwell- Bettis reciprocal theorem Hence, equation (31) may be
simplified as,
(29)
(30)
(31)
(32)
Now, differentiating the strain energy with respect to any displacement u1
gives the applied force P1 at that point, Hence,
(33)
Or,
(34)
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
7/12/12
Вам также может понравиться
- CIVL 222 AXIAL MEMBERSДокумент27 страницCIVL 222 AXIAL MEMBERSskhan247100% (1)
- Strength of Materials 2 Mark QuestionsДокумент42 страницыStrength of Materials 2 Mark Questionssiraj100% (5)
- Essential Heat Transfer ConceptsДокумент210 страницEssential Heat Transfer ConceptsJanardhan ReddyОценок пока нет
- MECHANICS OF MATERIALS REVIEWДокумент23 страницыMECHANICS OF MATERIALS REVIEWlowCL100% (1)
- Som VivaДокумент13 страницSom VivaDoddaBasappaKОценок пока нет
- Assignments On Prestressed ConcreteДокумент1 страницаAssignments On Prestressed Concreteourebooks100% (1)
- Som PDFДокумент105 страницSom PDFanon_10845568100% (1)
- Therefore, the principal stresses are:σ1 = 110 MPa (maximum principal stress)σ2 = 0 MPa (minimum principal stress)The principal planes make an angle of θp1 = -23.7° and θp2 = 66.3° from the x-axisДокумент55 страницTherefore, the principal stresses are:σ1 = 110 MPa (maximum principal stress)σ2 = 0 MPa (minimum principal stress)The principal planes make an angle of θp1 = -23.7° and θp2 = 66.3° from the x-axisAfif Azhar100% (1)
- Mechanics of Solids Lecture on Stress ConceptsДокумент38 страницMechanics of Solids Lecture on Stress Conceptsjust_friends199Оценок пока нет
- STRENGTH of MaterialsДокумент8 страницSTRENGTH of MaterialskousikkumaarОценок пока нет
- 1.0 Introduction (CE-312) PDFДокумент17 страниц1.0 Introduction (CE-312) PDFHussain AbidОценок пока нет
- PDF Ch3B Couple StaticДокумент43 страницыPDF Ch3B Couple StaticHaiqal AzizОценок пока нет
- Tension Compression and ShearДокумент27 страницTension Compression and ShearRizal Muhammad FaradayОценок пока нет
- Plate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityДокумент4 страницыPlate No. 1 ST314 - Structural Theory: Don Honorio Ventura State UniversityRamil T. TrinidadОценок пока нет
- Engineering MechanicsДокумент15 страницEngineering Mechanicsapi-26349602100% (1)
- Von MisesДокумент8 страницVon MisesAlex OliveiraОценок пока нет
- Torsion 6th ChapterДокумент13 страницTorsion 6th ChapterakshatbhargavaОценок пока нет
- Chapter 8 Combined LoadingДокумент6 страницChapter 8 Combined LoadingSumaya MahmoodОценок пока нет
- Engineering-Mechanics Notes PDFДокумент100 страницEngineering-Mechanics Notes PDFMahesh RamtekeОценок пока нет
- Mechanics of Materials-1 - 2-Mark Question and AnswersДокумент10 страницMechanics of Materials-1 - 2-Mark Question and AnswersSrikant PotluriОценок пока нет
- ME 6306 Strength of Materials Course OverviewДокумент8 страницME 6306 Strength of Materials Course OverviewGokulraju Rangasamy100% (2)
- INTRODUCTION (Cont..) : TIN 205-TIN31 Engineering MechanicsДокумент47 страницINTRODUCTION (Cont..) : TIN 205-TIN31 Engineering Mechanicsgundul paculОценок пока нет
- 1-Stress &Strain-Mechanics of MaterialsДокумент55 страниц1-Stress &Strain-Mechanics of MaterialsFelix Wahyu UtomoОценок пока нет
- SOM-Skill Course-1Документ81 страницаSOM-Skill Course-1Rohit RanjanОценок пока нет
- Moment of Inertia LectureДокумент26 страницMoment of Inertia LectureMohdmuslim AbdkohaОценок пока нет
- CE2252 Strength of Materials Lecture NotesДокумент88 страницCE2252 Strength of Materials Lecture NotesKA VEОценок пока нет
- Strength of Materials Lab Manual - MechanicalДокумент41 страницаStrength of Materials Lab Manual - MechanicalNallappan Rajj A100% (2)
- MEC 302 Mechanics of Materials Fall 14-15-01Документ54 страницыMEC 302 Mechanics of Materials Fall 14-15-01aaaa134100% (1)
- Lecture 01Документ91 страницаLecture 01usman cheemaОценок пока нет
- MECHANISMS DESIGN COURSE OVERVIEWДокумент59 страницMECHANISMS DESIGN COURSE OVERVIEWflorenceprasadОценок пока нет
- Overviews of StaticsДокумент70 страницOverviews of StaticsJacous WcyОценок пока нет
- Introduction To Gas Dynamics All Lecture Slides: Autumn 2009Документ107 страницIntroduction To Gas Dynamics All Lecture Slides: Autumn 2009Enrique FloresОценок пока нет
- Mechanical Engineering Stress AnalysisДокумент33 страницыMechanical Engineering Stress AnalysisagniflameОценок пока нет
- Introduction to Fluid Mechanics FundamentalsДокумент8 страницIntroduction to Fluid Mechanics Fundamentalssandrew784Оценок пока нет
- Design of Machine Elements II: Curved BeamsДокумент255 страницDesign of Machine Elements II: Curved BeamsAjayОценок пока нет
- Liquid Vapor Phase Change Technology - Course Work SyllabusДокумент4 страницыLiquid Vapor Phase Change Technology - Course Work SyllabusBhanu PrakashОценок пока нет
- Eccentric loading stress calculationДокумент5 страницEccentric loading stress calculationconfederateyankeeОценок пока нет
- 5 - Cylinders and Vessels (Part-1)Документ17 страниц5 - Cylinders and Vessels (Part-1)Rubab ZahraОценок пока нет
- Chapter 8 Slope and Deflection Strength of Materials - Part 1Документ14 страницChapter 8 Slope and Deflection Strength of Materials - Part 1Abhijith ShettyОценок пока нет
- Statics NoteДокумент26 страницStatics NoteMei GuanОценок пока нет
- Chapter 1 - Stress and StrainДокумент49 страницChapter 1 - Stress and StrainLuke Nate SarmientoОценок пока нет
- Edited Module1 ThermoДокумент18 страницEdited Module1 ThermoAnnaliza Alcazar ApostolОценок пока нет
- 2-Theories of Failure (MOS-2)Документ28 страниц2-Theories of Failure (MOS-2)Sohaib Zaib KhanОценок пока нет
- Formula Sheet For Exam 1Документ1 страницаFormula Sheet For Exam 1chris ricaОценок пока нет
- Basic Fluid Concepts and Properties (μ, ρ, γДокумент41 страницаBasic Fluid Concepts and Properties (μ, ρ, γMiraJo-LingОценок пока нет
- STR ModuleДокумент10 страницSTR ModuleViamae Avellana CabutajeОценок пока нет
- Normal & Shear Stress - Chapter 1Документ36 страницNormal & Shear Stress - Chapter 1ezoramajnunОценок пока нет
- TrussesДокумент11 страницTrussesrajmaljatОценок пока нет
- Dynamics of Rigid Bodies: Miko Anderson P. YjaresДокумент50 страницDynamics of Rigid Bodies: Miko Anderson P. YjaresAlvin RazoОценок пока нет
- Centroid SДокумент50 страницCentroid SAnu ParameswaranОценок пока нет
- ME259 Lecture Slides 2Документ43 страницыME259 Lecture Slides 2Fan YangОценок пока нет
- Mechanical Vibration - MSD - Part 2Документ9 страницMechanical Vibration - MSD - Part 2Mohammad Saad SalimОценок пока нет
- Solid Mechanics Two MarksДокумент13 страницSolid Mechanics Two MarksVignesh DuraiОценок пока нет
- Nanofluid in Heat Exchangers for Mechanical Systems: Numerical SimulationОт EverandNanofluid in Heat Exchangers for Mechanical Systems: Numerical SimulationОценок пока нет
- Advances in Plasticity 1989: Proceedings of Plasticity '89, the Second International Symposium on Plasticity and Its Current ApplicationОт EverandAdvances in Plasticity 1989: Proceedings of Plasticity '89, the Second International Symposium on Plasticity and Its Current ApplicationAkhtar S. KhanОценок пока нет
- StrainДокумент29 страницStrainDhayane Redoquerio AquinoОценок пока нет
- 4 - Mechanical Properties of MaterialsДокумент28 страниц4 - Mechanical Properties of MaterialsYusf ari jerjisОценок пока нет
- Measuring Stress and Strain with Strain GagesДокумент6 страницMeasuring Stress and Strain with Strain GagesKavitha KaviОценок пока нет
- Automated Feature Extraction in Oceanographic Visualization by Da GuoДокумент147 страницAutomated Feature Extraction in Oceanographic Visualization by Da GuoAnu ParameswaranОценок пока нет
- Estimating Mixed Layer Depth From Oceanic Profile Data PDFДокумент11 страницEstimating Mixed Layer Depth From Oceanic Profile Data PDFAnu ParameswaranОценок пока нет
- A Survey On Visual Analysis of Ocean DataДокумент16 страницA Survey On Visual Analysis of Ocean DataAnu ParameswaranОценок пока нет
- Matlab Random WavesДокумент185 страницMatlab Random WavesAlexis LopezОценок пока нет
- CGPA To PercentageДокумент6 страницCGPA To PercentageAnu ParameswaranОценок пока нет
- Clarifying Validity of TORs and Data Requirements for Environmental ClearanceДокумент6 страницClarifying Validity of TORs and Data Requirements for Environmental ClearanceAnu ParameswaranОценок пока нет
- BC PunmiaДокумент750 страницBC PunmiaAssignment Uploader57% (83)
- Acoustic ImpedanceДокумент12 страницAcoustic ImpedanceAnu Parameswaran100% (1)
- Introduction To Offshore Technology - (HE303)Документ1 страницаIntroduction To Offshore Technology - (HE303)Anu ParameswaranОценок пока нет
- Proposed ToR - RamcoДокумент5 страницProposed ToR - RamcoAnu ParameswaranОценок пока нет
- Mixed LayerДокумент8 страницMixed LayerAnu Parameswaran100% (1)
- Shore Temples in IndiaДокумент7 страницShore Temples in IndiaAnu ParameswaranОценок пока нет
- Tides TutorialДокумент36 страницTides TutorialAnu ParameswaranОценок пока нет
- PoroelasticityДокумент52 страницыPoroelasticityAnu ParameswaranОценок пока нет
- Tsunami Ency PDFДокумент16 страницTsunami Ency PDFAzki Zainal MilachОценок пока нет
- Spoken EnglishДокумент225 страницSpoken EnglishKumuda Srinath100% (2)
- Tsunami DMPДокумент38 страницTsunami DMPAnu ParameswaranОценок пока нет
- Anchors 2010 ReadingДокумент0 страницAnchors 2010 ReadingAnu Parameswaran100% (1)
- Chemmeen Biryani /konju Biryani /prawns /shrimp Biryani - Kerala StyleДокумент3 страницыChemmeen Biryani /konju Biryani /prawns /shrimp Biryani - Kerala StyleAnu ParameswaranОценок пока нет
- CEM PartVI-Chap2, Types & Functions of Coastal StructuresДокумент50 страницCEM PartVI-Chap2, Types & Functions of Coastal StructuresMar ZapataОценок пока нет
- Wave TableДокумент13 страницWave TableAnu ParameswaranОценок пока нет
- Gravity PlatformsДокумент23 страницыGravity PlatformsAnu ParameswaranОценок пока нет
- Lecture 1 Marine Hydro DynamicsДокумент5 страницLecture 1 Marine Hydro DynamicslimpamaОценок пока нет
- JacketДокумент28 страницJacketAnu ParameswaranОценок пока нет
- Pages 230 - 247 - Dynamics of Marine CraftДокумент9 страницPages 230 - 247 - Dynamics of Marine CraftAnu ParameswaranОценок пока нет
- Marine HydrodynamicsДокумент10 страницMarine HydrodynamicsAnu ParameswaranОценок пока нет
- Marine HydrodynamicsДокумент13 страницMarine HydrodynamicsAnu ParameswaranОценок пока нет
- Dynamics of Floating BodiesДокумент5 страницDynamics of Floating BodiesAnu ParameswaranОценок пока нет
- Civil Conv IIДокумент16 страницCivil Conv IIAnu ParameswaranОценок пока нет
- Centroid SДокумент50 страницCentroid SAnu ParameswaranОценок пока нет
- Effective Adhesive Modulus Approach For Evaluation of Curing StressesДокумент7 страницEffective Adhesive Modulus Approach For Evaluation of Curing StressesNelson AlvarezОценок пока нет
- Experimental Investigation of Inelastic Cyclic Buckling and Fracture of Steel BracesДокумент14 страницExperimental Investigation of Inelastic Cyclic Buckling and Fracture of Steel BracesMacОценок пока нет
- Study Materials For Mechanical EngineersДокумент63 страницыStudy Materials For Mechanical EngineersOmprakash ManharОценок пока нет
- Reading - Topic - Earth PressureДокумент67 страницReading - Topic - Earth PressureDilum VRОценок пока нет
- MEC412 Test 2 Beam AnalysisДокумент2 страницыMEC412 Test 2 Beam AnalysisWanAminudinОценок пока нет
- Turcite T51 Engineering DataДокумент1 страницаTurcite T51 Engineering DataAntonio Rivera VillavicencioОценок пока нет
- Mech 302 - Strength of Materials SyllabusДокумент3 страницыMech 302 - Strength of Materials SyllabusHarold TaylorОценок пока нет
- Prevabricated Vertical Drain (PVD)Документ47 страницPrevabricated Vertical Drain (PVD)aider indonesiaОценок пока нет
- Alexiew - Geotextile Encased ColumnsДокумент14 страницAlexiew - Geotextile Encased ColumnscenkОценок пока нет
- LVL Hip Rafter DesignДокумент5 страницLVL Hip Rafter DesignDavid Shanks 1Оценок пока нет
- Size Effects in Reinforced Concrete Beams StrengthДокумент6 страницSize Effects in Reinforced Concrete Beams StrengthSyh TfkОценок пока нет
- Batch No: Wurth SR No: 1 Date: 2/1/2018 Tested For: PAHARPUR Test Type: Tensile - Rod/Tube Basic Load/Displacement GraphДокумент7 страницBatch No: Wurth SR No: 1 Date: 2/1/2018 Tested For: PAHARPUR Test Type: Tensile - Rod/Tube Basic Load/Displacement GraphkasvikrajОценок пока нет
- Strength of Materials Laws Friction Elasticity PlasticityДокумент3 страницыStrength of Materials Laws Friction Elasticity PlasticitySai VanumamalaiОценок пока нет
- Page 11 of 11Документ39 страницPage 11 of 11John Paulo GregorioОценок пока нет
- 5.ASD Problems - STEEL STRUCTURESДокумент25 страниц5.ASD Problems - STEEL STRUCTURESDarya MemonОценок пока нет
- FOOTING DESIGNДокумент9 страницFOOTING DESIGNMitra RampersadОценок пока нет
- Torsional Analysis of Steel Members (American Institute of Steel Construction, 1983)Документ34 страницыTorsional Analysis of Steel Members (American Institute of Steel Construction, 1983)Raul Mendoza SubiaОценок пока нет
- Beam force summaryДокумент1 страницаBeam force summaryMichael John MolinaОценок пока нет
- WWF - Wood StrengthДокумент3 страницыWWF - Wood StrengthRichard Leonel Vasquez MezaОценок пока нет
- DESIGN OF ROLLED AND BUILT-UP BEAMS AND COLUMNS AS PER AISC-LRFD (14th EditionДокумент20 страницDESIGN OF ROLLED AND BUILT-UP BEAMS AND COLUMNS AS PER AISC-LRFD (14th Editionnavneet3bawaОценок пока нет
- Curved BeamДокумент85 страницCurved Beamanon_651663167Оценок пока нет
- Core-Based Prediction of Lithologic Stress 1994Документ8 страницCore-Based Prediction of Lithologic Stress 1994Juan P MSОценок пока нет
- Liquefied Strength Ratio From Liquefaction Flow PDFДокумент19 страницLiquefied Strength Ratio From Liquefaction Flow PDFAlcides Cordova MateoОценок пока нет
- 6th Sem QuestionДокумент2 страницы6th Sem QuestionNiteshRaiОценок пока нет
- AIAA Journal Volume 33 Issue 10 1995 (Doi 10.2514/3.12745) Hu, Jian S. Hwu, Chyanbin - Free Vibration of Delaminated Composite Sandwich BeamsДокумент9 страницAIAA Journal Volume 33 Issue 10 1995 (Doi 10.2514/3.12745) Hu, Jian S. Hwu, Chyanbin - Free Vibration of Delaminated Composite Sandwich BeamsAdnan AhmedОценок пока нет
- L 3 Rock CompressibilityДокумент9 страницL 3 Rock CompressibilityLawrenceLopez100% (1)
- Title: Step-by-Step Engineering Design Equations For FRP Structural BeamsДокумент8 страницTitle: Step-by-Step Engineering Design Equations For FRP Structural BeamskasvikrajОценок пока нет
- Mechanical Behaviour and Testing of MaterialsДокумент5 страницMechanical Behaviour and Testing of MaterialsSachi DhanandamОценок пока нет
- Ceramic fractography techniquesДокумент10 страницCeramic fractography techniquesfroylan sanchez hernandezОценок пока нет
- Solid Mechanics Crib SheetДокумент27 страницSolid Mechanics Crib SheetAdam FoltzОценок пока нет