Вам также может понравиться
- 18860858Документ11 страниц18860858exampler.gamesОценок пока нет
- Работа с Программой ECR TeleToolДокумент29 страницРабота с Программой ECR TeleToolLeo SchОценок пока нет
- MKA Robototehnika LEGO Urok 02 1539163874Документ10 страницMKA Robototehnika LEGO Urok 02 1539163874Alex SkuboОценок пока нет
- Курсовая Рамазан1Документ26 страницКурсовая Рамазан17sbkd4sss5Оценок пока нет
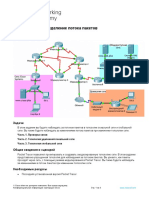
- 4.4.1.1 Packet Tracer - Configuring A Zone-Based Policy Firewall (ZPF)Документ5 страниц4.4.1.1 Packet Tracer - Configuring A Zone-Based Policy Firewall (ZPF)Санжар БаглановОценок пока нет
- Приложение РобИн 2024Документ48 страницПриложение РобИн 2024burdun1243Оценок пока нет
- Справочное Руководство Диспетчера и Технолога 2012Документ68 страницСправочное Руководство Диспетчера и Технолога 2012Sergiy HzОценок пока нет
- CS GoДокумент8 страницCS GoArtem BorysovОценок пока нет
- L0 IntrodusionДокумент11 страницL0 IntrodusionAibat RakhimОценок пока нет
- Сумо 2024Документ5 страницСумо 2024richmangoldboss98Оценок пока нет
- Mikrotik TelegramДокумент22 страницыMikrotik TelegramMarco Antonio Martinez AndradeОценок пока нет
- 25 Fishok CompbestДокумент243 страницы25 Fishok Compbeststepasergienko1Оценок пока нет
- MikroBILL HelpДокумент194 страницыMikroBILL HelpAshot AvagyanОценок пока нет
- Instructions For Install Satellite Routers PDFДокумент19 страницInstructions For Install Satellite Routers PDFSergey LukinОценок пока нет
- 1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLIДокумент11 страниц1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLIDamir18Оценок пока нет
- Кремлев А.С., Зименко К.А., Боргуль А.С. - Моделирование и Программирование Робототехнических Комплексов - 2013Документ136 страницКремлев А.С., Зименко К.А., Боргуль А.С. - Моделирование и Программирование Робототехнических Комплексов - 2013валентинОценок пока нет
- Mikrotik Hotspot1Документ13 страницMikrotik Hotspot1Роман КозловОценок пока нет
- 1.3.2.4 Lab - TracingДокумент3 страницы1.3.2.4 Lab - TracingАнтон нуссОценок пока нет
- MTCNA-2016 Module-1 RouterOS BasicsДокумент78 страницMTCNA-2016 Module-1 RouterOS BasicsIon CojocaruОценок пока нет
- ИБ СС Максатбеков Каниет СМСдот-1-18Документ15 страницИБ СС Максатбеков Каниет СМСдот-1-18Begaiym Nurdin kyzyОценок пока нет
- PraktikumДокумент41 страницаPraktikumChingis SaktoevОценок пока нет
- 05 - Начало Работы с RouterOSДокумент42 страницы05 - Начало Работы с RouterOSLolОценок пока нет
- 6.5.1.2 Lab - Building A Switch and Router NetworkДокумент6 страниц6.5.1.2 Lab - Building A Switch and Router NetworkPonfearОценок пока нет
- метод указ по сетямДокумент28 страницметод указ по сетямJoomart GriffinОценок пока нет
- Packet Tracer 7Документ12 страницPacket Tracer 7fedorОценок пока нет
- Readme RuДокумент7 страницReadme RuKarolinaCucosОценок пока нет
- NozzleFEM-System Administrator Guide RusДокумент4 страницыNozzleFEM-System Administrator Guide Ruser_scecОценок пока нет
- Lab 3560-cxДокумент33 страницыLab 3560-cxalexОценок пока нет
- Метод одновременной навигации и составления карты (SLAM)Документ14 страницМетод одновременной навигации и составления карты (SLAM)hebaya2101Оценок пока нет
- Xilog Plus PanMac RДокумент73 страницыXilog Plus PanMac Rtata ouineОценок пока нет
- методичка ИССДокумент43 страницыметодичка ИССJoomart GriffinОценок пока нет
- Razrabotka Arhitektury Poletnogo Kontrollera Dlya Kvadrokoptera Na Baze Odnoplatnogo Kompyutera Raspberry PiДокумент15 страницRazrabotka Arhitektury Poletnogo Kontrollera Dlya Kvadrokoptera Na Baze Odnoplatnogo Kompyutera Raspberry Picherrrybombb23Оценок пока нет
- Nc Studio Pcimc-3d Руководство Пользователя 1Документ25 страницNc Studio Pcimc-3d Руководство Пользователя 1Tim AkhmedovОценок пока нет
- Метод иголкиДокумент6 страницМетод иголкиAlexandru DumbravaОценок пока нет
- Lab 6aДокумент4 страницыLab 6akdjfierjfef;le fjerifjritrhgtughОценок пока нет
- 1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLIДокумент14 страниц1.1.4.6 Lab - Configuring Basic Router Settings With IOS CLIДымронОценок пока нет
- AutoCAD 2008. Руководство по драйверам и периферийным устройствамДокумент210 страницAutoCAD 2008. Руководство по драйверам и периферийным устройствамmititicagigibecaliОценок пока нет
- Промышленный робот для производства и ремонта подвижного составаДокумент10 страницПромышленный робот для производства и ремонта подвижного составаNurul Hidayati0% (1)
- 449077.pptx 2Документ39 страниц449077.pptx 2Arman KuanyshevОценок пока нет
- 3 OsEngine ArbitrageДокумент4 страницы3 OsEngine Arbitragemaxrainz90Оценок пока нет
- By.бфид.10353-01 34 01 Руководство Оператора По СигмаДокумент82 страницыBy.бфид.10353-01 34 01 Руководство Оператора По СигмаMehemmed MeherremovОценок пока нет
- PacketTracer5 3 1 10Документ4 страницыPacketTracer5 3 1 10VAn DarkholmeОценок пока нет
- ГНСС станция на Ublox ZED-F9PДокумент12 страницГНСС станция на Ublox ZED-F9PОлег Перетятко.Оценок пока нет
- PP ZardaniaDD BIVT-20-5 DocxДокумент29 страницPP ZardaniaDD BIVT-20-5 Docxm2011167Оценок пока нет
- КамерыДокумент55 страницКамерыxjayjimyoiisnbОценок пока нет
- Курсовая работа на тему: Создание корпусной деталиДокумент31 страницаКурсовая работа на тему: Создание корпусной деталиKEKSОценок пока нет
- Post Коды и диагностические PDFДокумент33 страницыPost Коды и диагностические PDFvlanovoОценок пока нет
- 2.1.4.9 Lab - Establishing A Console Session With Tera TermДокумент12 страниц2.1.4.9 Lab - Establishing A Console Session With Tera TermXyuОценок пока нет
- RU.88338853.501430.007 ТУ - Технические условияДокумент17 страницRU.88338853.501430.007 ТУ - Технические условияUpperОценок пока нет
- Руководство пользователя по диспетчерской консоли SmartPTTДокумент313 страницРуководство пользователя по диспетчерской консоли SmartPTTSmartPTTОценок пока нет
- Лек Введение IosДокумент11 страницЛек Введение IosFirdavs SultonovОценок пока нет
- Telegraf - Документация Traffic Inspector Next Generation 1.5.0Документ3 страницыTelegraf - Документация Traffic Inspector Next Generation 1.5.0Валерий ГонОценок пока нет
- Методичка 3 Смарт Контракты в Сети EthereumДокумент25 страницМетодичка 3 Смарт Контракты в Сети EthereumАлександр МатюшовОценок пока нет
- RC1920 TP39 Abc 003Документ52 страницыRC1920 TP39 Abc 003Школа 48Оценок пока нет
- 2.3.3.4 Lab - Configuring A Switch Management Address PDFДокумент8 страниц2.3.3.4 Lab - Configuring A Switch Management Address PDFSilens RoОценок пока нет
- UntitledДокумент811 страницUntitledВасилий СайфутдиновОценок пока нет
- Changes RUДокумент3 страницыChanges RUlokiwaneseОценок пока нет
- тема диплома и краткое описаниеДокумент2 страницытема диплома и краткое описаниеasdasdasОценок пока нет
- Ue QuestionsДокумент10 страницUe Questionseugenehoasterd100% (2)