Вам также может понравиться
- Формулы на все случаи жизни: Как математика помогает выходить из сложных ситуацийОт EverandФормулы на все случаи жизни: Как математика помогает выходить из сложных ситуацийОценок пока нет
- 2.4 Переопределенные СЛАУДокумент4 страницы2.4 Переопределенные СЛАУgidiweОценок пока нет
- Efimov Parametr-PDF A5Документ64 страницыEfimov Parametr-PDF A5Satyam Kumar MalОценок пока нет
- 01 Численное решение СЛАУДокумент21 страница01 Численное решение СЛАУYuriy KosarihinОценок пока нет
- Алгебра. 9 класс. Пятый блок. Системы уравнений и неравенств с несколькими переменнымиДокумент22 страницыАлгебра. 9 класс. Пятый блок. Системы уравнений и неравенств с несколькими переменнымиKSTA WHOОценок пока нет
- Методика решения иррациональных уравненийДокумент7 страницМетодика решения иррациональных уравненийmailОценок пока нет
- Лекц4Документ9 страницЛекц4PacManОценок пока нет
- 4. Лекция - СЛАУДокумент23 страницы4. Лекция - СЛАУdimon.b04Оценок пока нет
- Matematika Profil Zadanie15Документ28 страницMatematika Profil Zadanie15eladowski100% (1)
- Диссертация 1 copy 2Документ123 страницыДиссертация 1 copy 2iov87279Оценок пока нет
- Изоморфизм ДеревьяДокумент21 страницаИзоморфизм Деревьяlatysh.o.katerinaОценок пока нет
- SCFДокумент17 страницSCFFred RossiОценок пока нет
- Лекция 10 ФМ - 21 - 05 - 2019 часть 2Документ16 страницЛекция 10 ФМ - 21 - 05 - 2019 часть 2Дана БогуновичОценок пока нет
- 307r - İnşaat Mexanikası - Mühazirə 1584604049-Str Mexanika 307rДокумент55 страниц307r - İnşaat Mexanikası - Mühazirə 1584604049-Str Mexanika 307rKhana SalimkhanovaОценок пока нет
- Система остаточных классовДокумент5 страницСистема остаточных классовJohnОценок пока нет
- голова тимурДокумент126 страницголова тимурarsenijchavchanidzeОценок пока нет
- Lab Tu02Документ6 страницLab Tu02VaОценок пока нет
- Kvadratnyye Uravneniya. MnogochlenyДокумент27 страницKvadratnyye Uravneniya. MnogochlenyВасилий НехинОценок пока нет
- 1 Система уравнений второй степени с двумя неизвестнымиДокумент20 страниц1 Система уравнений второй степени с двумя неизвестнымиВиктория КарповичОценок пока нет
- Решение определенных систем с помощью обратной матрицы для высшей математикиДокумент4 страницыРешение определенных систем с помощью обратной матрицы для высшей математикиLerocher delaigleОценок пока нет
- Реализация в MATLAB алгоритмов построения фрактальных объектовДокумент11 страницРеализация в MATLAB алгоритмов построения фрактальных объектовLe Minh HieuОценок пока нет
- Расчет СН СС Методом СилДокумент44 страницыРасчет СН СС Методом СилСеменОценок пока нет
- Расчет СН СС Методом СилДокумент44 страницыРасчет СН СС Методом СилСеменОценок пока нет
- Линейная алгебраДокумент69 страницЛинейная алгебраcsomov_521573696Оценок пока нет
- Реалізація алгоритму розв'язання СЛДУ в вполях вычетовДокумент7 страницРеалізація алгоритму розв'язання СЛДУ в вполях вычетовArtemGurinОценок пока нет
- Intensiv Matricy OpredeliteliДокумент56 страницIntensiv Matricy Opredelitelibolotkanovasaadat7Оценок пока нет
- Ref 4626 Parta UaДокумент12 страницRef 4626 Parta UaSNOYP [СНОУП]Оценок пока нет
- Сборник задач по высшей математикеДокумент175 страницСборник задач по высшей математикеGegОценок пока нет
- Uravneniya I Neravenstva S Modulem. Metod Intervalov. Grafiki FunktsyДокумент38 страницUravneniya I Neravenstva S Modulem. Metod Intervalov. Grafiki FunktsyЕлизавета СемьянОценок пока нет
- Контр. вопросы матрицыДокумент5 страницКонтр. вопросы матрицыМайнкрафт МайнкрафтОценок пока нет
- Представление Решений Одного Класса Системы Дифференциальных Уравнений В Комплексной ПлоскостиДокумент6 страницПредставление Решений Одного Класса Системы Дифференциальных Уравнений В Комплексной ПлоскостиCentral Asian StudiesОценок пока нет
- ГЛАВА IVДокумент23 страницыГЛАВА IVnasti4958Оценок пока нет
- О количестве фундаментальных физических взаимодействийДокумент5 страницО количестве фундаментальных физических взаимодействийAndrey AngorskyОценок пока нет
- Mo 358Документ24 страницыMo 358Виолетта РигельОценок пока нет
- 24 TestДокумент5 страниц24 TestAida TaalaibekovaОценок пока нет
- UntitledДокумент4 страницыUntitledАлексей СибирцевОценок пока нет
- Math PDFДокумент80 страницMath PDFAzam JoraevОценок пока нет
- заданиЕ №23»Документ12 страницзаданиЕ №23»SaveliyОценок пока нет
- Theory rk1Документ9 страницTheory rk1wkw37785Оценок пока нет
- Отношение порядкаДокумент13 страницОтношение порядкаПавел БеляковОценок пока нет
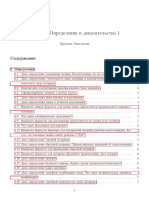
- Algebra Opredelenia I Dokazatelstva 1Документ13 страницAlgebra Opredelenia I Dokazatelstva 1Анна ШиловаОценок пока нет
- Ryabushko Algebra GeometrijaДокумент17 страницRyabushko Algebra GeometrijaNicolai IftodeОценок пока нет
- 4-2.sluchajnye LesaДокумент7 страниц4-2.sluchajnye LesaalpyОценок пока нет
- 9407Документ11 страниц9407UОценок пока нет
- Mitina Resh ZadachДокумент8 страницMitina Resh ZadachTimofey ShabanovОценок пока нет
- глава 11Документ9 страницглава 11Andrej OrémušОценок пока нет
- ПрезентаціяДокумент8 страницПрезентаціяMaks KiykoОценок пока нет
- Лекция 3 Часть 3 ФМ Березинец ИВ 12.03.2019 StataДокумент19 страницЛекция 3 Часть 3 ФМ Березинец ИВ 12.03.2019 StataДана БогуновичОценок пока нет
- СТАТИЧЕСКИЙ МЕТОД ПРЕДЕЛЬНОГО РАВНОВЕСИЯ ДЛЯ РДокумент5 страницСТАТИЧЕСКИЙ МЕТОД ПРЕДЕЛЬНОГО РАВНОВЕСИЯ ДЛЯ РТатьяна КарзюкОценок пока нет
- ООО "Книжный Дом"Документ92 страницыООО "Книжный Дом"Андрей КузнецовОценок пока нет
- Алгоритмы На С++ (PDFDrive)Документ1 001 страницаАлгоритмы На С++ (PDFDrive)MaxОценок пока нет
- ModellingДокумент6 страницModellingGeorge HigginsОценок пока нет
- Лекция 1. Матрицы и операции с ними.Документ8 страницЛекция 1. Матрицы и операции с ними.Александр УчаевОценок пока нет
- Algosi 1 - Lecture 3Документ13 страницAlgosi 1 - Lecture 3vawyasaxmrizjhywgrОценок пока нет
- 1. Матрицы и определители 1Документ26 страниц1. Матрицы и определители 1rasulnasirov6Оценок пока нет
- Article - N - Otsenka Koeffitsienta Intensivnosti Napryazheniy V Protsesse Dvuhosnogo RastyazheniyaДокумент5 страницArticle - N - Otsenka Koeffitsienta Intensivnosti Napryazheniy V Protsesse Dvuhosnogo RastyazheniyaАндрей ЛозовойОценок пока нет
- Matrix TheoryДокумент137 страницMatrix TheoryMayara JulianОценок пока нет
- Практикум 1 Матрицы. Операции над матрицами.Документ8 страницПрактикум 1 Матрицы. Операции над матрицами.awdwdwdОценок пока нет
- Matematika I VariantДокумент10 страницMatematika I VariantaisarasalhОценок пока нет
- Zadachnik Po DiskrДокумент42 страницыZadachnik Po DiskrВладислав ПортнягинОценок пока нет
- ПростаяИнструкцияVPNДокумент3 страницыПростаяИнструкцияVPNgidiweОценок пока нет
- 2.10 SVD РазложениеДокумент6 страниц2.10 SVD РазложениеgidiweОценок пока нет
- 2.3 Некорректные задачиДокумент3 страницы2.3 Некорректные задачиgidiweОценок пока нет
- Философия и методология науки - Кузьменко - 46 стр PDFДокумент453 страницыФилософия и методология науки - Кузьменко - 46 стр PDFКлим ИдрисовОценок пока нет
- Курпатов Красная таблеткаДокумент46 страницКурпатов Красная таблеткаgidiweОценок пока нет
- Всё, что движется: Прогулки по беспокойной Вселенной. От космических орбит до квантовых полейОт EverandВсё, что движется: Прогулки по беспокойной Вселенной. От космических орбит до квантовых полейОценок пока нет
- Странные совпадения в твоей жизни. Маленькие любопытные события. Предчувствия. Телепатия. С тобой тоже такое случается? Квантовая физика и теория синхронизма объясняют экстрасенсорные явления.От EverandСтранные совпадения в твоей жизни. Маленькие любопытные события. Предчувствия. Телепатия. С тобой тоже такое случается? Квантовая физика и теория синхронизма объясняют экстрасенсорные явления.Оценок пока нет
- Во власти цифр. Как числа управляют нашей жизнью и вводят в заблуждениеОт EverandВо власти цифр. Как числа управляют нашей жизнью и вводят в заблуждениеОценок пока нет
- Вселенная разумна. Душа существует. Квантовые загадки, мультивселенная, квантовая запутанность, синхронность. Преодоление материализма для духовного видения космоса.От EverandВселенная разумна. Душа существует. Квантовые загадки, мультивселенная, квантовая запутанность, синхронность. Преодоление материализма для духовного видения космоса.Оценок пока нет
- Как устроен мир на самом деле. Наше прошлое, настоящее и будущее глазами ученогоОт EverandКак устроен мир на самом деле. Наше прошлое, настоящее и будущее глазами ученогоОценок пока нет
- Магия физики: Как управлять тайными силами материи, создавать вещества из квантового мира и вызывать кристаллы из хаосаОт EverandМагия физики: Как управлять тайными силами материи, создавать вещества из квантового мира и вызывать кристаллы из хаосаОценок пока нет
- Квантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.От EverandКвантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.Оценок пока нет
- Квантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.От EverandКвантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.Оценок пока нет
- Beginning of higher physics and the way to the center of the universeОт EverandBeginning of higher physics and the way to the center of the universeОценок пока нет
- “ЛАБИРИНТЫ КОМБИНАТОРНОЙ ЛИТЕРАТУРЫ: от палиндрома к фракталу”От Everand“ЛАБИРИНТЫ КОМБИНАТОРНОЙ ЛИТЕРАТУРЫ: от палиндрома к фракталу”Оценок пока нет