Вам также может понравиться
- Лаб. работа - Корреляционный приемникДокумент17 страницЛаб. работа - Корреляционный приемникЖенек ПроОценок пока нет
- Отчет Осцилляторы Герасимов МА 381803-1Документ18 страницОтчет Осцилляторы Герасимов МА 381803-1Mikhail GerasimovОценок пока нет
- z3530902 80201 ТАУ БашкирцевАВДокумент9 страницz3530902 80201 ТАУ БашкирцевАВАлексей БашкирцевОценок пока нет
- MMATAN02Документ115 страницMMATAN02savaba8669Оценок пока нет
- Олимпиада-РДокумент85 страницОлимпиада-РNguyễn HuyОценок пока нет
- распознавание лица человека в видеопотоке с помощью нейронной сетиДокумент31 страницараспознавание лица человека в видеопотоке с помощью нейронной сетиАртем ВоронинОценок пока нет
- 2000 - 11 - 05 - Moskov tom3 - 35 - Упрощение реализации метода линейных спектральных пар (частот) в линейном предсказании речиДокумент4 страницы2000 - 11 - 05 - Moskov tom3 - 35 - Упрощение реализации метода линейных спектральных пар (частот) в линейном предсказании речиOleg PavlovОценок пока нет
- Курсовая работа ЛеМаньДатДокумент54 страницыКурсовая работа ЛеМаньДатManh Dat LeОценок пока нет
- ANSYSДокумент82 страницыANSYSJavier0% (1)
- Prilozhenie Formuly KombinatorikiДокумент3 страницыPrilozhenie Formuly KombinatorikiSmartOn “Smart Studio”Оценок пока нет
- Popov N. Dvizhenie Zaryazhennyh Chastits - FragmentДокумент7 страницPopov N. Dvizhenie Zaryazhennyh Chastits - FragmentYotube VideosОценок пока нет
- ШпоргалкаДокумент31 страницаШпоргалкаnano9valОценок пока нет
- Лекция 1. Понятие о математическом нейронеДокумент14 страницЛекция 1. Понятие о математическом нейронеРомас БуткусОценок пока нет
- Lab101 2019Документ16 страницLab101 2019BunhammerОценок пока нет
- Formuly Kombinatoriki PDFДокумент3 страницыFormuly Kombinatoriki PDFDior JadoreОценок пока нет
- Formuly KombinatorikiДокумент3 страницыFormuly KombinatorikiМагомед МержоевОценок пока нет
- Чуркин В.А. - Конечномерные линейные операторы (18s)Документ18 страницЧуркин В.А. - Конечномерные линейные операторы (18s)DechoОценок пока нет
- 1 KKVДокумент6 страниц1 KKVйцукенгшОценок пока нет
- Adaptivnyy Suboptimalnyy Filtr Kalmana V Zadache Vystavki BinsДокумент14 страницAdaptivnyy Suboptimalnyy Filtr Kalmana V Zadache Vystavki BinsKhoi Nguyen VanОценок пока нет
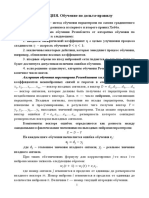
- Лекция 3. Обучение по дельта правилу PDFДокумент13 страницЛекция 3. Обучение по дельта правилу PDFРомас БуткусОценок пока нет
- Расчетное задание LEMANHDATДокумент49 страницРасчетное задание LEMANHDATManh Dat LeОценок пока нет
- Lab FizikaДокумент92 страницыLab FizikaЕркеназ МахатОценок пока нет
- Теория случайных процессов PDFДокумент58 страницТеория случайных процессов PDFHayk EminyanОценок пока нет
- Логические основы компьютераДокумент9 страницЛогические основы компьютераPavel RuzanovОценок пока нет
- Lab 4Документ7 страницLab 4Fernando CasasОценок пока нет
- Е. Б. Павельева, В. Я. ТомашпольскийДокумент78 страницЕ. Б. Павельева, В. Я. ТомашпольскийAnonymous rFIshYyОценок пока нет
- Önemli RuДокумент24 страницыÖnemli RuNecdet DemiralpОценок пока нет
- экзамен по ЛА (жопа) PDFДокумент77 страницэкзамен по ЛА (жопа) PDFАнна ШиловаОценок пока нет
- лекция 4Документ4 страницылекция 4Soe Htet NaingОценок пока нет
- AttractorДокумент32 страницыAttractorzlataworkuwuОценок пока нет
- 47d915c256d927c31e9f51d3d47fc320bebbff3d3665f71d3d5d508b6e8d7a4bДокумент21 страница47d915c256d927c31e9f51d3d47fc320bebbff3d3665f71d3d5d508b6e8d7a4bshatakjain2901Оценок пока нет
- Tutorial 20231015Документ7 страницTutorial 20231015Кирилл НагошаОценок пока нет
- КОЛЕБАНИЯ И ВОЛНЫ МИФИДокумент48 страницКОЛЕБАНИЯ И ВОЛНЫ МИФИКолобок ТрбОценок пока нет
- 3Документ2 страницы3XD CDОценок пока нет
- ГИРОСКОП ФУКО И ЕГО ВИДОИЗМЕНЕНИЯДокумент13 страницГИРОСКОП ФУКО И ЕГО ВИДОИЗМЕНЕНИЯКристина ЛазареваОценок пока нет
- Kombin VeroyatnДокумент30 страницKombin VeroyatnNikita LitvinenkoОценок пока нет
- Kombin VeroyatnДокумент30 страницKombin VeroyatnGyzomert 1337Оценок пока нет
- Kombin VeroyatnДокумент30 страницKombin VeroyatnНастя СтиртаОценок пока нет
- Postroenie Optimalnyh Traektoriy V Mnogomernyh Prostranstvah Na Osnove Fizicheskih ModeleyДокумент10 страницPostroenie Optimalnyh Traektoriy V Mnogomernyh Prostranstvah Na Osnove Fizicheskih ModeleyVartan Babayan4Оценок пока нет
- Задачи с экзаменаДокумент14 страницЗадачи с экзаменаBayasaaОценок пока нет
- Задачи с экзаменаДокумент14 страницЗадачи с экзаменаBayasaaОценок пока нет
- Лекция 1.pdf (262 Кб)Документ14 страницЛекция 1.pdf (262 Кб)Вероника ЕреминаОценок пока нет
- Сканирующая прямаяДокумент4 страницыСканирующая прямаяSkos MartrenОценок пока нет
- 3IMPULSДокумент8 страниц3IMPULSИгорь ГлушенковОценок пока нет
- DPДокумент10 страницDPАлександр ЖуковОценок пока нет
- Курсовая 8 семестрДокумент23 страницыКурсовая 8 семестрSajoura SalahОценок пока нет
- Реалізація алгоритму розв'язання СЛДУ в вполях вычетовДокумент7 страницРеалізація алгоритму розв'язання СЛДУ в вполях вычетовArtemGurinОценок пока нет
- ExtremNкритерий сильвестра экстремумДокумент17 страницExtremNкритерий сильвестра экстремумKostya KkrukovОценок пока нет
- Sol Phys 10 SCHДокумент5 страницSol Phys 10 SCHДанил КузнецовОценок пока нет
- методичка по атомно-ядерной физикеДокумент40 страницметодичка по атомно-ядерной физикеAziret ToktobaevОценок пока нет
- ЛР7 ТИДЗ АлексеевЕА ИБ-04зДокумент11 страницЛР7 ТИДЗ АлексеевЕА ИБ-04зЕгор АлексеевОценок пока нет
- Функции нескольких переменных 2022Документ73 страницыФункции нескольких переменных 2022andreyka.khudyakov.2005Оценок пока нет
- Ref 4635 Parta UaДокумент16 страницRef 4635 Parta UaSNOYP [СНОУП]Оценок пока нет
- Манапов ЖалгасДокумент5 страницМанапов ЖалгасzalgasmanapovОценок пока нет
- 48 ядерная физикаДокумент9 страниц48 ядерная физикаArmen SahakyanОценок пока нет
- К-р 8 АДокумент6 страницК-р 8 А1234Оценок пока нет
- ТФКП-Комплексная динамикаДокумент18 страницТФКП-Комплексная динамикаmonochromerОценок пока нет
- моделирование системДокумент31 страницамоделирование системNatalia ChircaОценок пока нет
- Определение ускорения силы тяжести при помощи оборотного маятника Методические указания к лабораторной работеДокумент10 страницОпределение ускорения силы тяжести при помощи оборотного маятника Методические указания к лабораторной работеperryОценок пока нет
- Сергей Гаврилов. Разбираемся с квантовой механикойДокумент44 страницыСергей Гаврилов. Разбираемся с квантовой механикойSergey KatsuboОценок пока нет
- Сергей Гаврилов. Знакомство с линейной теориейДокумент78 страницСергей Гаврилов. Знакомство с линейной теориейSergey KatsuboОценок пока нет
- Сергей Гаврилов. Функциональный анализ для начинающихДокумент77 страницСергей Гаврилов. Функциональный анализ для начинающихSergey KatsuboОценок пока нет
- Сергей Гаврилов. Вопросы и ответы по специальной теории относительностиДокумент67 страницСергей Гаврилов. Вопросы и ответы по специальной теории относительностиSergey KatsuboОценок пока нет