Вам также может понравиться
- 2. Гидравлика. Методические указания для решения задачДокумент34 страницы2. Гидравлика. Методические указания для решения задачТочка Роста100% (1)
- Система ACARS Боинг 737Документ20 страницСистема ACARS Боинг 737azamat.amanov.1993Оценок пока нет
- ВЛП 2019. Методы предотвращения захвата ложной глиссадыДокумент20 страницВЛП 2019. Методы предотвращения захвата ложной глиссадыVjeslav BrzęczyszczykiewiczОценок пока нет
- Betoane. Metode de IncercariДокумент9 страницBetoane. Metode de IncercariIon RusuОценок пока нет
- ГОСТ 5916-70Документ5 страницГОСТ 5916-70aliautodesign93Оценок пока нет
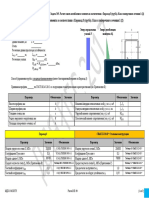
- Бланк 4 N+M труба (класс 1 и 2)Документ9 страницБланк 4 N+M труба (класс 1 и 2)Vasiliy1000Оценок пока нет
- Zadachnik Po TrigonometriiДокумент21 страницаZadachnik Po TrigonometriiOlena HerasymenkoОценок пока нет
- Расчет Простых и Сложных Газопроводов (Задачки Прості)Документ12 страницРасчет Простых и Сложных Газопроводов (Задачки Прості)Роман СеменчукОценок пока нет
- F 1178970499Документ40 страницF 1178970499proeqti 90Оценок пока нет
- ГОСТ 20889-88 Шкивы Приводных Клиновых РемнейДокумент17 страницГОСТ 20889-88 Шкивы Приводных Клиновых РемнейИгорьОценок пока нет
- Aerodinamiceskij Rascet VertoletaДокумент33 страницыAerodinamiceskij Rascet Vertoletatahir sadikovicОценок пока нет
- D847q875g182i952o3878i1253o203Документ2 страницыD847q875g182i952o3878i1253o203Ivan CovalencoОценок пока нет
- 67001Документ46 страниц67001v.cheliuh22Оценок пока нет
- BelousovДокумент5 страницBelousovДаниил МатюшкинОценок пока нет
- 02 MIDAS НОЦ Геотехника МГСУ ТерДокумент35 страниц02 MIDAS НОЦ Геотехника МГСУ ТерIVAN WILLIAMS SUCUITANA CCAIHUARIОценок пока нет
- SRS 2 Re7 2008Документ1 страницаSRS 2 Re7 2008Ellen YiОценок пока нет
- Teoreticheskiy Raschet Davleniya V Emkostyah Zapolnennyh Diskretnoy SredoyДокумент6 страницTeoreticheskiy Raschet Davleniya V Emkostyah Zapolnennyh Diskretnoy SredoyKevin RedОценок пока нет
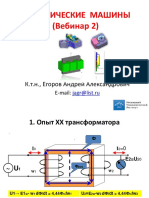
- Вебинар 2 ТрансформаторыДокумент19 страницВебинар 2 ТрансформаторыAndreОценок пока нет
- Статья о двух системах УКДокумент14 страницСтатья о двух системах УКbaurzhannОценок пока нет
- Подшипники Качения. Поля Допусков и Тех Треб 3325-85Документ105 страницПодшипники Качения. Поля Допусков и Тех Треб 3325-85howixam305Оценок пока нет
- Gost3067 88Документ3 страницыGost3067 88Artem KushОценок пока нет
- DIN 939 ГОСТ 22034-76 Шпилька с резьбовым концом приблизительно 1,25dДокумент5 страницDIN 939 ГОСТ 22034-76 Шпилька с резьбовым концом приблизительно 1,25dVladimir Z.V.Оценок пока нет
- ГОСТ Р 51349-99 - Транспорт напольный безрельсовый. Плиты грузовые, вилы. ТУДокумент12 страницГОСТ Р 51349-99 - Транспорт напольный безрельсовый. Плиты грузовые, вилы. ТУGoodDogОценок пока нет
- ما هي الشريعة 1-112Документ114 страницما هي الشريعة 1-112Nasr MuhsenОценок пока нет
- Gost 19128-73Документ4 страницыGost 19128-73Fang NinaОценок пока нет
- ДЛГ 31.07.18 2018-322-02 Ми-8МТВ-1 RUДокумент3 страницыДЛГ 31.07.18 2018-322-02 Ми-8МТВ-1 RUErnesto ZamoraОценок пока нет
- МЕТОДИКА СНИП СУГДокумент44 страницыМЕТОДИКА СНИП СУГAkram AbdulloyevОценок пока нет
- PC 422Документ4 страницыPC 422petrovi482Оценок пока нет
- SP 131.13330.2012 Stroitelnaya KlimatologiyaДокумент120 страницSP 131.13330.2012 Stroitelnaya KlimatologiyaAlexandru VieruОценок пока нет
- Презентация ВВЭР ТОИДокумент19 страницПрезентация ВВЭР ТОИPaОценок пока нет
- Технические характеристикиДокумент2 страницыТехнические характеристикиВиктор УсОценок пока нет
- ГОСТ 7727-81Документ26 страницГОСТ 7727-81Ирина МихайловаОценок пока нет
- Ограничения По Применению РЛПК МиГ-29Документ6 страницОграничения По Применению РЛПК МиГ-29Taso SadikovicОценок пока нет
- 4293818513Документ14 страниц4293818513GihtyfОценок пока нет
- ГОСТ 29137-91 Формовка выводов и установка изделий электронной техники на печатные платыДокумент31 страницаГОСТ 29137-91 Формовка выводов и установка изделий электронной техники на печатные платыПавел КазаковОценок пока нет
- PDFДокумент44 страницыPDFTom WinterОценок пока нет
- АГБ-3 Техническое Описание и Инструкция По ЭксплуатацииДокумент45 страницАГБ-3 Техническое Описание и Инструкция По ЭксплуатацииIgor Guidea100% (1)
- АГБ 3 PDFДокумент45 страницАГБ 3 PDFRikhard SorgeОценок пока нет
- АГБ-3 Техническое Описание и Инструкция По ЭксплуатацииДокумент45 страницАГБ-3 Техническое Описание и Инструкция По Эксплуатацииsupersparc88Оценок пока нет
- ГОСТ 21.204-93 СПДС Условные Графические Обозначения и Изображения Элементов Генеральных Планов и СооруженийДокумент27 страницГОСТ 21.204-93 СПДС Условные Графические Обозначения и Изображения Элементов Генеральных Планов и СооруженийJackОценок пока нет
- Жатка кукурузная КВК-800Документ114 страницЖатка кукурузная КВК-800Дмитрий КабанчукОценок пока нет
- Рыбин Рыбина 2006Документ3 страницыРыбин Рыбина 2006mkholmyОценок пока нет
- RSCC Booklet Am5 RusДокумент4 страницыRSCC Booklet Am5 RusАлёна БартязоваОценок пока нет
- Jeová Jireh - Full ScoreДокумент2 страницыJeová Jireh - Full ScoreederbispoОценок пока нет
- Физика Вариант 1Документ5 страницФизика Вариант 1bullfinch2Оценок пока нет
- optimizatsiya-rezhima-regulirovaniya-vysoty-konicheskih-grohotov-i-sroki-sluzhby-rabochih-koles-gruntonasosov-pri-gidromehanizirovannoy-razrabotke-obvodnennyh-mestorozhdeniy-nerudnyh-stroitelnyh-materialovДокумент8 страницoptimizatsiya-rezhima-regulirovaniya-vysoty-konicheskih-grohotov-i-sroki-sluzhby-rabochih-koles-gruntonasosov-pri-gidromehanizirovannoy-razrabotke-obvodnennyh-mestorozhdeniy-nerudnyh-stroitelnyh-materialovAzamat NiyazmetowОценок пока нет
- Копия Статья о двух системах УКДокумент14 страницКопия Статья о двух системах УКbaurzhannОценок пока нет
- Veroyatnostnyy Metod Otsenki Tehnicheskogo Sostoyaniya Konstruktsiy Zhelezobetonnogo Monolitnogo Perekrytiya Zdaniy Staroy Gorodskoy ZastroykiДокумент10 страницVeroyatnostnyy Metod Otsenki Tehnicheskogo Sostoyaniya Konstruktsiy Zhelezobetonnogo Monolitnogo Perekrytiya Zdaniy Staroy Gorodskoy ZastroykianhoangbacОценок пока нет
- Технологическая Исх Тип 04Документ34 страницыТехнологическая Исх Тип 04tip04.rmkОценок пока нет
- 1-2 ChastДокумент55 страниц1-2 ChastАнварОценок пока нет
- De 3330Документ5 страницDe 3330AlОценок пока нет
- 89 БанниковДокумент4 страницы89 БанниковRikhard SorgeОценок пока нет
- KDZ 2014Документ6 страницKDZ 2014newballsplsОценок пока нет
- Гост 25212Документ20 страницГост 25212glubo419Оценок пока нет
- Жильников Е П Балякин В Б Суслин А В Расчет и проектирование дифференциальногоДокумент76 страницЖильников Е П Балякин В Б Суслин А В Расчет и проектирование дифференциальногоDzhobuldaОценок пока нет
- ПРИМЕНЕНИЕ ВЗЛЁТОВ САМОЛЁТА С ПОНИЖЕННОЙ ТЯГОЙ С ЦЕЛЬЮ ЭКОНОМИИ РЕСУРСА ДВИГАТЕЛЕЙДокумент2 страницыПРИМЕНЕНИЕ ВЗЛЁТОВ САМОЛЁТА С ПОНИЖЕННОЙ ТЯГОЙ С ЦЕЛЬЮ ЭКОНОМИИ РЕСУРСА ДВИГАТЕЛЕЙpretty.angel1081Оценок пока нет
- U B.UkДокумент20 страницU B.UkИнга НикифороваОценок пока нет
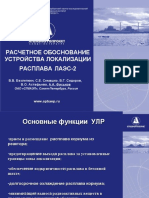
- Расчетное обоснование устройства локализации расплава ЛАЭС-2Документ13 страницРасчетное обоснование устройства локализации расплава ЛАЭС-2Atomic-Energy.ruОценок пока нет
- ЛПч7Документ13 страницЛПч7Владимир ПетречкивОценок пока нет
- - ОСТ - 34-10-752-97 - Колена секторные сварные.Документ53 страницы- ОСТ - 34-10-752-97 - Колена секторные сварные.yastrub1990Оценок пока нет
- ГОСТ Р 51273-99 (2006)Документ17 страницГОСТ Р 51273-99 (2006)ӨлзийбилэгӨөкийБалданДоржОценок пока нет
- М-Хобби 2013-01 (140) (e)Документ76 страницМ-Хобби 2013-01 (140) (e)Nickiedeposie100% (2)
- Mi 8 Vertolet Korotkoe Opisanie Sistem I Dejstvija EkipazaДокумент230 страницMi 8 Vertolet Korotkoe Opisanie Sistem I Dejstvija EkipazaTaso SadikovicОценок пока нет
- Ka-32 266 BEДокумент9 страницKa-32 266 BEIgor GuideaОценок пока нет
- Системы Дозаправки Топливом в ПолётеДокумент36 страницСистемы Дозаправки Топливом в ПолётеTaso SadikovicОценок пока нет
- ДВТ НГСМ-РФ-94 1991 Наставл ГСМДокумент58 страницДВТ НГСМ-РФ-94 1991 Наставл ГСМСергейОценок пока нет
- История авиации и космонавтики.Документ115 страницИстория авиации и космонавтики.Tatjana VojtovaОценок пока нет