Вам также может понравиться
- контрольная работа по защите информацииДокумент16 страницконтрольная работа по защите информацииLucy CheОценок пока нет
- Boss DLDДокумент4 страницыBoss DLDatique rahmanОценок пока нет
- Didi MoroziДокумент28 страницDidi Morozixega13Оценок пока нет
- 22 06 2Документ798 страниц22 06 2sanji jihanОценок пока нет
- числДокумент4 страницычислprtfnxОценок пока нет
- Контрольная Мирошников СБТ-82Документ9 страницКонтрольная Мирошников СБТ-82Mir00n Mir00nОценок пока нет
- Per CPMДокумент15 страницPer CPMDiego GarciaОценок пока нет
- Call Me in AmДокумент2 страницыCall Me in AmJason Butler-BoffeyОценок пока нет
- 2022.02.15 - Учебные машины УМ-3Документ5 страниц2022.02.15 - Учебные машины УМ-3nigij32263Оценок пока нет
- Raport Fin Succint RusДокумент3 страницыRaport Fin Succint RusНадежда ШинкарюкОценок пока нет
- 07 DLДокумент61 страница07 DLSales AydinkayaОценок пока нет
- Metodos NumericosДокумент8 страницMetodos Numericosanekla190Оценок пока нет
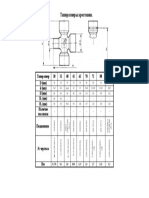
- КрестовиныДокумент1 страницаКрестовиныОлександр КосолапОценок пока нет
- Король и Шут ЛесникДокумент7 страницКороль и Шут ЛесникSimon TemplerОценок пока нет
- Gerasimov N S Laba 1Документ5 страницGerasimov N S Laba 1robertОценок пока нет
- Хоналар руйхатиДокумент3 страницыХоналар руйхатиASR HOTELОценок пока нет
- Bossanova Etude 5Документ2 страницыBossanova Etude 5alexОценок пока нет
- Bossanova Etude 5Документ2 страницыBossanova Etude 5alexОценок пока нет
- SIN 32 Plunger PumpДокумент23 страницыSIN 32 Plunger PumpDan MarianОценок пока нет
- JacobiДокумент2 страницыJacobiPaulina CamachoChavezОценок пока нет
- Laba1 1Документ9 страницLaba1 1влад делеуОценок пока нет
- Gost 12938Документ5 страницGost 12938ДмитрийОценок пока нет
- دراسة جدوى مشروع مطعم وجبات سريعهДокумент268 страницدراسة جدوى مشروع مطعم وجبات سريعهمحمد احمدОценок пока нет
- 2BL2 S - 200 - User Manual RUДокумент37 страниц2BL2 S - 200 - User Manual RUPaul GennsonОценок пока нет
- 2022.02.17 - Занятие УМ-3, УМ-2Документ13 страниц2022.02.17 - Занятие УМ-3, УМ-2nigij32263Оценок пока нет
- Standartnaja Chast Koda ASCIIДокумент1 страницаStandartnaja Chast Koda ASCIIArmen AxababyanОценок пока нет
- Standartnaja Chast Koda ASCIIДокумент1 страницаStandartnaja Chast Koda ASCIIvache.kocharyanОценок пока нет
- Be Water, Be Genebre:: GRB@NT-RT - RuДокумент20 страницBe Water, Be Genebre:: GRB@NT-RT - RuBanupriya BalasubramanianОценок пока нет
- Boiler OVK 120Документ25 страницBoiler OVK 120Jagix85Оценок пока нет
- Жатка кукурузная КВК-800Документ114 страницЖатка кукурузная КВК-800Дмитрий КабанчукОценок пока нет
- CortoДокумент3 страницыCortoMoreira MartinezОценок пока нет
- отчетДокумент4 страницыотчетВладимир ПетровОценок пока нет
- 【攻略】更新完畢 デジタルモンスター Ver.20th 養育攻略 - 巴哈姆特手機版Документ1 страница【攻略】更新完畢 デジタルモンスター Ver.20th 養育攻略 - 巴哈姆特手機版Wax TsoiОценок пока нет
- Ответы зачёт IpatovaДокумент23 страницыОтветы зачёт IpatovaМария ГришинаОценок пока нет
- 31. ОТЧ БАЛАНСОВЫЙ Ф1 2012г СТУДЕНТДокумент4 страницы31. ОТЧ БАЛАНСОВЫЙ Ф1 2012г СТУДЕНТОльга ЗайченкоОценок пока нет
- SM-T865 Common EPLIS 11Документ30 страницSM-T865 Common EPLIS 11Vietmobile PageОценок пока нет
- Ifm Sensor de Flujo ElectrónicoДокумент6 страницIfm Sensor de Flujo Electrónicoian_gushepiОценок пока нет
- 10uf 600v Kondenzator MbgoДокумент3 страницы10uf 600v Kondenzator MbgoAsfd AsfdОценок пока нет
- 469 Q 1145900Документ6 страниц469 Q 1145900gheorghiy belciucОценок пока нет
- 469 Q 1145900Документ6 страниц469 Q 1145900gheorghiy belciucОценок пока нет
- Uchebnaya PraktikaДокумент6 страницUchebnaya PraktikaAnonymous xrdMzEQОценок пока нет
- AP - Vigencia - 20220401 - Sustituciones y AlternativasДокумент1 152 страницыAP - Vigencia - 20220401 - Sustituciones y AlternativasRepuestos Tours CitroenОценок пока нет
- 38. ОТЧ - О СОВОК - ДОХОДЕ Ф2 2012г СТУДЕНТДокумент3 страницы38. ОТЧ - О СОВОК - ДОХОДЕ Ф2 2012г СТУДЕНТОльга ЗайченкоОценок пока нет
- ГОСТ 30633-99 Підшипники роликові радіальні сферичні однорядні. Основні розміриДокумент15 страницГОСТ 30633-99 Підшипники роликові радіальні сферичні однорядні. Основні розміриArtem SemenyakОценок пока нет
- 32. ОТЧ БАЛАНСОВЫЙ Ф1 2013г СТУДЕНТДокумент4 страницы32. ОТЧ БАЛАНСОВЫЙ Ф1 2013г СТУДЕНТОльга ЗайченкоОценок пока нет
- Componente 01b 202220Документ92 страницыComponente 01b 202220Melissa Garcia cortijoОценок пока нет
- D 6 B 674Документ6 страницD 6 B 674ТатьянаОценок пока нет
- Libro 1Документ4 страницыLibro 1r.marindijОценок пока нет
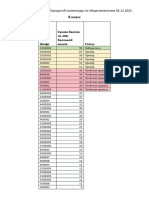
- Итоговые результаты Городской олимпиады по обществу 2022Документ11 страницИтоговые результаты Городской олимпиады по обществу 2022dima kirОценок пока нет
- Fl00079АрхДокумент40 страницFl00079АрхPegas UkraineОценок пока нет
- DrainKIT - Sistem de Drenaj - DrainKITДокумент5 страницDrainKIT - Sistem de Drenaj - DrainKITFerenczi Z. SámuelОценок пока нет
- Груз. операции полныйДокумент83 страницыГруз. операции полныйsailomsk24Оценок пока нет
- Resolucion de Ecuaciones ComplejasДокумент5 страницResolucion de Ecuaciones ComplejasTrancosОценок пока нет
- 2022 02 17 Домашнее задание УМ 3 и УМ 2Документ7 страниц2022 02 17 Домашнее задание УМ 3 и УМ 2nigij32263Оценок пока нет
- Parcial MetodoДокумент9 страницParcial MetodoJesus Daniel OrtizОценок пока нет
- Катюша PDFДокумент2 страницыКатюша PDFviktorОценок пока нет
- Lab3 AsdnДокумент3 страницыLab3 AsdnDenis LipkanОценок пока нет
- Moya DetkaДокумент20 страницMoya DetkaJennifer ReadОценок пока нет
- UntitledДокумент6 страницUntitledNahla AhmedОценок пока нет
- 789 DC 649922 A 5 Ca 5Документ1 страница789 DC 649922 A 5 Ca 5damiОценок пока нет
- e A S 94603Документ2 страницыe A S 94603damiОценок пока нет
- KitavarДокумент1 страницаKitavardamiОценок пока нет
- Хераборина 1Документ4 страницыХераборина 1damiОценок пока нет
- Okazanii Platnykh Obrazovatelnykh Uslug V Sfere Vysshego Obrazovaniya S Fizicheskim LitsomДокумент8 страницOkazanii Platnykh Obrazovatelnykh Uslug V Sfere Vysshego Obrazovaniya S Fizicheskim LitsomdamiОценок пока нет
- GuideДокумент51 страницаGuidedamiОценок пока нет
- Bulldog M.D.Документ2 страницыBulldog M.D.damiОценок пока нет
- Orwell Liam Battler 2Документ2 страницыOrwell Liam Battler 2damiОценок пока нет
- 944 Инструкция По Эксплуатац RuДокумент288 страниц944 Инструкция По Эксплуатац Rupavel100% (1)
- Контроль качества PDFДокумент236 страницКонтроль качества PDFDima KrasnobokyОценок пока нет
- Hyundai Santa Fe ClassicДокумент15 страницHyundai Santa Fe ClassicКайратОценок пока нет
- Примерные Вопросы и Ответы НКТДокумент38 страницПримерные Вопросы и Ответы НКТBerik MoldashovОценок пока нет
- ABB Price Book 384Документ1 страницаABB Price Book 384EliasОценок пока нет