Вам также может понравиться
- Контроллер KP310V1Документ39 страницКонтроллер KP310V1Владимир ЛВИ88% (8)
- РЦ-030 РЦ-100 (Стерео, Ethernet) MaxДокумент52 страницыРЦ-030 РЦ-100 (Стерео, Ethernet) MaxНиколай Петряков50% (2)
- FabFilter Total Bundle 2016.02.02 x86 x64 No InstallДокумент3 страницыFabFilter Total Bundle 2016.02.02 x86 x64 No InstallJordy KietoОценок пока нет
- 802270Документ12 страниц802270Екатерина ТокмакОценок пока нет
- Таблица параметров-ATV320Документ1 страницаТаблица параметров-ATV320seva3674Оценок пока нет
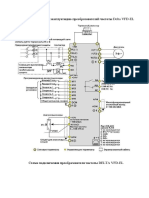
- Цифровые тиристорные преобразователи серии 12ХХХ WSM для приводов подачиДокумент2 страницыЦифровые тиристорные преобразователи серии 12ХХХ WSM для приводов подачи1 2Оценок пока нет
- Йе Наунг (доклад) 25Документ4 страницыЙе Наунг (доклад) 25Soe Htet NaingОценок пока нет
- CDVR RusДокумент111 страницCDVR Rusavshmyrov100% (2)
- Инструкция по LENZEДокумент2 страницыИнструкция по LENZEAnonymous vb8Yz6UОценок пока нет
- TYT TH 9000D SATCOM ModsДокумент19 страницTYT TH 9000D SATCOM ModsDhionatan Souza100% (1)
- Микросхема дисплейного контроллера TCON для LCD панелей TFTДокумент9 страницМикросхема дисплейного контроллера TCON для LCD панелей TFTIvОценок пока нет
- TL494 Rus WДокумент15 страницTL494 Rus WfsfsfsefОценок пока нет
- Smartgen Manual-6100K PDFДокумент32 страницыSmartgen Manual-6100K PDFdmitry100% (2)
- MCS220 тех описаниеДокумент19 страницMCS220 тех описаниеCoil98Оценок пока нет
- Modernizatsiya Mehatronnoy Sistemy Upravleniya Radioteleskopom RT 7 5Документ13 страницModernizatsiya Mehatronnoy Sistemy Upravleniya Radioteleskopom RT 7 5valetelobedОценок пока нет
- сд4047Документ9 страницсд4047Валерий ШатохинОценок пока нет
- ИВЛ Фаза-5НР и Наркозная Приставка Фаза 5ПН.Документ29 страницИВЛ Фаза-5НР и Наркозная Приставка Фаза 5ПН.антонОценок пока нет
- Руководство Дельта ЕЛ Chastotnik Vfd El ManualДокумент7 страницРуководство Дельта ЕЛ Chastotnik Vfd El ManualЮрийОценок пока нет
- Справочник По Программировани Bascom-8051 (м.л. Кулиш, 2001)Документ155 страницСправочник По Программировани Bascom-8051 (м.л. Кулиш, 2001)sudokumanОценок пока нет
- Инструкция DCRKДокумент10 страницИнструкция DCRKИгорь ДовгаленкоОценок пока нет
- Servo Katalog Rus PDFДокумент60 страницServo Katalog Rus PDFсерый пасюгинОценок пока нет
- IDS-Drive ZДокумент23 страницыIDS-Drive ZАлександрОценок пока нет
- Лекция 9 нДокумент9 страницЛекция 9 нcryptОценок пока нет
- Тема 2.1. Управление светодиодамиДокумент38 страницТема 2.1. Управление светодиодамиMaffinОценок пока нет
- аДокумент1 страницааАртем ШугайОценок пока нет
- Tutor SpeccyДокумент21 страницаTutor Speccy2hckw87Оценок пока нет
- Itog3 1 11 PDFДокумент11 страницItog3 1 11 PDFЛомакин фёдорОценок пока нет
- Itog3 PDFДокумент11 страницItog3 PDFЛомакин фёдорОценок пока нет
- Кочкуров Сергей. Расчет компаратора с гистерезисомДокумент6 страницКочкуров Сергей. Расчет компаратора с гистерезисомJennifer AndersonОценок пока нет
- Sigma 2Документ20 страницSigma 2Aleksandr DowgalОценок пока нет
- Instruktsia IDS Drive ZДокумент23 страницыInstruktsia IDS Drive ZSam VinchesterОценок пока нет
- Arcweld UC3875Документ6 страницArcweld UC3875Liana MihailaОценок пока нет
- Leroy Somer Avr r726 Manual PDFДокумент24 страницыLeroy Somer Avr r726 Manual PDFderenokОценок пока нет
- 0 Orion-Upz Opisanie Produkta 2017 RusДокумент3 страницы0 Orion-Upz Opisanie Produkta 2017 RusCosmic Garash 2Оценок пока нет
- Тема 2.3. Динамическая индикацияДокумент26 страницТема 2.3. Динамическая индикацияMaffinОценок пока нет
- Тема - Электроприводы станков с ЧПУДокумент23 страницыТема - Электроприводы станков с ЧПУПавелОценок пока нет
- КВ трансивер «Трель» RW4LQДокумент18 страницКВ трансивер «Трель» RW4LQDan RotaruОценок пока нет
- Расчет усилительного каскада на биполярном транзисторе + QUCS TransistorsДокумент13 страницРасчет усилительного каскада на биполярном транзисторе + QUCS TransistorsIlya RaskatovОценок пока нет
- BODYBUILDER I0305 PDFДокумент76 страницBODYBUILDER I0305 PDFopa952ya.ruОценок пока нет
- DAC-109 Manual RuДокумент25 страницDAC-109 Manual RuSergeyОценок пока нет
- 14Документ6 страниц14iillanesch325Оценок пока нет
- ПЧ VFD-ED V05 1 для двигателя с постоянными магнитамиДокумент4 страницыПЧ VFD-ED V05 1 для двигателя с постоянными магнитамиDima VorobeyОценок пока нет
- 210 Manual 326 BДокумент28 страниц210 Manual 326 BАлексей ХоролецОценок пока нет
- АЦП последовательного приближения Сигма-дельта АЦП Параллельные (Flash) АЦП Конвейерные (Pipelined) АЦП АЦП последовательного счета (Bit-Per-Stage)Документ39 страницАЦП последовательного приближения Сигма-дельта АЦП Параллельные (Flash) АЦП Конвейерные (Pipelined) АЦП АЦП последовательного счета (Bit-Per-Stage)igork1981Оценок пока нет
- Param Tnc-430 RusДокумент69 страницParam Tnc-430 RusVladimirAgeevОценок пока нет
- Lieu CapДокумент30 страницLieu CapyamaxiОценок пока нет
- ОписаниеДокумент11 страницОписаниеnailton pereiraОценок пока нет
- ImpS PDFДокумент10 страницImpS PDFIgor MosanuОценок пока нет
- Rukovodstvo Po Ekspluatatsii PA8090Документ8 страницRukovodstvo Po Ekspluatatsii PA8090Вячеслав МарковОценок пока нет
- DCRJДокумент29 страницDCRJИгорь ДовгаленкоОценок пока нет
- 110 Manual 406Документ38 страниц110 Manual 406chubenko209Оценок пока нет
- 51 55Документ5 страниц51 55Александр ВеликийОценок пока нет
- Vacon NXL Multicontrol Application Manual DPD01467A - RUДокумент69 страницVacon NXL Multicontrol Application Manual DPD01467A - RUvoencomОценок пока нет
- SANT 656121 104RE Ruk Po Expl EPU ESPT-48-K-2U-8kW-3R096-002Документ16 страницSANT 656121 104RE Ruk Po Expl EPU ESPT-48-K-2U-8kW-3R096-002Vanek505Оценок пока нет
- 310manual5-00 21.12.19Документ48 страниц310manual5-00 21.12.19IgorОценок пока нет
- 4XXXДокумент74 страницы4XXXAlexОценок пока нет
- BP AtxДокумент87 страницBP AtxRyssLann100% (1)
- Tema 10-2 Grm-5Документ8 страницTema 10-2 Grm-5Андрей ПоповОценок пока нет
- Pratt & Whitney Canada PW100Документ1 страницаPratt & Whitney Canada PW100feshin.vsevolodОценок пока нет
- Testovoe ZadanieДокумент5 страницTestovoe ZadanieКонстантин ЗайцевОценок пока нет
- Приложение 1 Сдельные Расценки ЦАПДокумент2 страницыПриложение 1 Сдельные Расценки ЦАПBauyrzhanОценок пока нет
- Manual Do Usuario Transmissor Wireless StrykerДокумент32 страницыManual Do Usuario Transmissor Wireless StrykerCaroline LobatoОценок пока нет