Вам также может понравиться
- 705 User RussianДокумент63 страницы705 User RussianOleg DalgakiranОценок пока нет
- 307 - РЕД Для НАЛАДчДокумент33 страницы307 - РЕД Для НАЛАДчFin PlanОценок пока нет
- KkkiДокумент4 страницыKkkitolik lapuaОценок пока нет
- Arcode (Rusça)Документ65 страницArcode (Rusça)Victor SmintinaОценок пока нет
- Инструкция по монтажу и эксплуатации SK-712Документ18 страницИнструкция по монтажу и эксплуатации SK-712Алексей СырачевОценок пока нет
- Переделка FSP3528Документ9 страницПеределка FSP3528kolesik100% (1)
- DAC-109 Manual RuДокумент25 страницDAC-109 Manual RuSergeyОценок пока нет
- ШИМ 2003-translated 221203 111514Документ13 страницШИМ 2003-translated 221203 111514Сергей СтариновОценок пока нет
- User Manual dkg-307Документ50 страницUser Manual dkg-307matyuchonokОценок пока нет
- 5 - BQ24726 RuДокумент61 страница5 - BQ24726 Ruzigmund zigmundОценок пока нет
- WelesДокумент1 страницаWelesincore1976Оценок пока нет
- Подключение диагностического оборудования к автомобилюДокумент3 страницыПодключение диагностического оборудования к автомобилюSergo SergeevОценок пока нет
- Chipsoft j2534 Mid RuДокумент8 страницChipsoft j2534 Mid RuВячеслав ГлушакОценок пока нет
- P 712 D 2 5 - Ver 3 0 0 - AДокумент19 страницP 712 D 2 5 - Ver 3 0 0 - AВиктор ПанзыгаОценок пока нет
- Указания по настройке преобразователей частоты ATV71Документ18 страницУказания по настройке преобразователей частоты ATV71DigiWalkerОценок пока нет
- Usb ConsultДокумент12 страницUsb Consultzubzub1Оценок пока нет
- Mcu t13 400w 12 H RuДокумент2 страницыMcu t13 400w 12 H RuLeonid DorfmanОценок пока нет
- Kometa CS - 48 PDFДокумент16 страницKometa CS - 48 PDFДима СелютинОценок пока нет
- генераторныДокумент6 страницгенераторныruslan futkaradzeОценок пока нет
- User Manual DKG-175Документ11 страницUser Manual DKG-175Санжар СиражеденОценок пока нет
- bm9213 k line адаптерДокумент1 страницаbm9213 k line адаптерleshaserviceОценок пока нет
- CNC Shield v3Документ7 страницCNC Shield v3Hakob AdamyanОценок пока нет
- CNC Shield v3Документ7 страницCNC Shield v3Marzio MarinoОценок пока нет
- Рис. 1. Пример Подключения Изолированного Драйвера Затвора Adum4120Документ6 страницРис. 1. Пример Подключения Изолированного Драйвера Затвора Adum4120Михаил ДенисовОценок пока нет
- CGC 400 Data Sheet 4921240471 RuДокумент12 страницCGC 400 Data Sheet 4921240471 Ruribeirojoao00344Оценок пока нет
- Manual JBL GTO7001Документ4 страницыManual JBL GTO7001Alejandro EspinozaОценок пока нет
- генераторныДокумент6 страницгенераторныruslan futkaradzeОценок пока нет
- CDVR RusДокумент111 страницCDVR Rusavshmyrov100% (2)
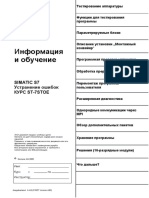
- Course Rus St-7stoeДокумент176 страницCourse Rus St-7stoeاحتشام چوہدریОценок пока нет
- ATV61 Install RUДокумент28 страницATV61 Install RUrouslankhОценок пока нет
- CA Vcontact-Vsc (Ru s2) D 1vcp000532-3Документ56 страницCA Vcontact-Vsc (Ru s2) D 1vcp000532-3TetianaОценок пока нет
- 210 Manual 326 BДокумент28 страниц210 Manual 326 BАлексей ХоролецОценок пока нет
- Fisher Fieldvue dvc6200 Profibus Connection&setup Via PDMДокумент20 страницFisher Fieldvue dvc6200 Profibus Connection&setup Via PDMa.albin.jrОценок пока нет
- СОБИРАЕМ ОПТИМАЛЬНЫЙ HI-FI УСИЛИТЕЛЬДокумент2 страницыСОБИРАЕМ ОПТИМАЛЬНЫЙ HI-FI УСИЛИТЕЛЬАлексей ЗолевскийОценок пока нет
- DKG 509J RussianДокумент104 страницыDKG 509J RussianНиколай БелыйОценок пока нет
- Hy Div268n 5aДокумент2 страницыHy Div268n 5aminolitaОценок пока нет
- Arcode Руководство По Запуску и Быстрой НастройкеДокумент43 страницыArcode Руководство По Запуску и Быстрой Настройкеyounes100% (4)
- Scod CMD-V4 RuДокумент8 страницScod CMD-V4 RuSergei KiselevОценок пока нет
- AXIOMA IsgridДокумент31 страницаAXIOMA IsgridmaxpokaluikovОценок пока нет
- Leroy Somer Avr r726 Manual PDFДокумент24 страницыLeroy Somer Avr r726 Manual PDFderenokОценок пока нет
- Sistemotehnika - Elektrooborudovanie Lex 510 600 PDFДокумент514 страницSistemotehnika - Elektrooborudovanie Lex 510 600 PDFSerhii100% (2)
- Zenit Compact 1 55-1-59Документ48 страницZenit Compact 1 55-1-59Victor FilipОценок пока нет
- Общее Описание Электроприводов PwrDrv Ver2.51Документ94 страницыОбщее Описание Электроприводов PwrDrv Ver2.51Сергей100% (1)
- PCAT200Документ3 страницыPCAT200steven.seagalОценок пока нет
- Инструкция По Запуску Шпинделя в Mach3Документ15 страницИнструкция По Запуску Шпинделя в Mach3ЕвгенийОценок пока нет
- DKG 507rus PDF Rus YazДокумент40 страницDKG 507rus PDF Rus YazСервисная служба ООО ЭРСОценок пока нет
- ИНСТРУКЦИЯ Г-414 6 - 12в - Full - 2018 - AДокумент3 страницыИНСТРУКЦИЯ Г-414 6 - 12в - Full - 2018 - ASergo ZingerОценок пока нет
- ATV312 User ManualДокумент44 страницыATV312 User ManualвоваОценок пока нет
- I2c7 7Документ11 страницI2c7 7EvgenyОценок пока нет
- Haval H2 EWDДокумент120 страницHaval H2 EWDautocare0% (1)
- Haval H2 Manual Tecnico-1-1Документ20 страницHaval H2 Manual Tecnico-1-1josefaОценок пока нет
- 12 p14-15Документ2 страницы12 p14-15Emilian Angelov AngelovОценок пока нет
- KWR 7QA03 921 190503 en RU Installation ManualДокумент15 страницKWR 7QA03 921 190503 en RU Installation ManualEdgar Alberto Ortiz GallegosОценок пока нет
- Peugeot 307Документ2 страницыPeugeot 307Роман ВолковОценок пока нет
- Manual Gesan Ats GekoДокумент5 страницManual Gesan Ats GekoВладислав ЛеоновОценок пока нет
- Инструкция Подключение и Запуск РРЛ Huawei Optix RTN-380 PDFДокумент23 страницыИнструкция Подключение и Запуск РРЛ Huawei Optix RTN-380 PDFvas100% (1)
- Архитектура и Работа с Данными 1СДокумент268 страницАрхитектура и Работа с Данными 1СFlocosu VictorОценок пока нет
- Слив схемы 100к на пассиве (@netstal) PDFДокумент34 страницыСлив схемы 100к на пассиве (@netstal) PDFRosegold StoreОценок пока нет
- Micromine 2016.1 Whats New RussianДокумент75 страницMicromine 2016.1 Whats New RussiansoloserjОценок пока нет
- DevsвДокумент19 страницDevsвEkaterina MerzlikinaОценок пока нет
- 40 алгоритмов, которые должен знать каждый программист на PythonОт Everand40 алгоритмов, которые должен знать каждый программист на PythonОценок пока нет
- Социальные медиа маркетинг для малого бизнеса: Как привлечь новых клиентов, заработать больше денег и выделиться из толпыОт EverandСоциальные медиа маркетинг для малого бизнеса: Как привлечь новых клиентов, заработать больше денег и выделиться из толпыОценок пока нет
- Система моделирования и исследования радиоэлектронных устройств Multisim 10От EverandСистема моделирования и исследования радиоэлектронных устройств Multisim 10Оценок пока нет
- Блокчейн: архитектура, криптовалюты, инструменты разработки, смарт-контрактыОт EverandБлокчейн: архитектура, криптовалюты, инструменты разработки, смарт-контрактыОценок пока нет
- Заставьте данные говорить: Как сделать бизнес-дашборд в Excel. Руководство по визуализации данныхОт EverandЗаставьте данные говорить: Как сделать бизнес-дашборд в Excel. Руководство по визуализации данныхОценок пока нет
- Unity в действии. Мультиплатформенная разработка на C#. 2-е межд. изданиеОт EverandUnity в действии. Мультиплатформенная разработка на C#. 2-е межд. изданиеОценок пока нет
- Простой подход к фундаментальному инвестиционному анализу: Вводное руководство по методам фундаментального анализа и стратегиям предвидения событий, которые движут рынкамиОт EverandПростой подход к фундаментальному инвестиционному анализу: Вводное руководство по методам фундаментального анализа и стратегиям предвидения событий, которые движут рынкамиОценок пока нет
- Руководство по рекламе Google: Вводный путеводитель по самой известной и популярной рекламной программе в сети: основная информация и ключевые моменты, которые необходимо знатьОт EverandРуководство по рекламе Google: Вводный путеводитель по самой известной и популярной рекламной программе в сети: основная информация и ключевые моменты, которые необходимо знатьОценок пока нет
- Как вернуть клиента на сайт: ретаргетинг, ремаркетинг, email и не толькоОт EverandКак вернуть клиента на сайт: ретаргетинг, ремаркетинг, email и не толькоОценок пока нет
- Простой подход к торговле на рынке форекс: Вводное руководство по рынку Форекс и наиболее эффективным стратегиям торговли валютойОт EverandПростой подход к торговле на рынке форекс: Вводное руководство по рынку Форекс и наиболее эффективным стратегиям торговли валютойОценок пока нет
- Искусственный интеллект отвечает на величайшие вопросы человечества. Что делает нас людьми?От EverandИскусственный интеллект отвечает на величайшие вопросы человечества. Что делает нас людьми?Оценок пока нет
- Простой подход к интернет-трейдингу: Как научиться основам интернет-трейдинга для успешной торговли на финансовых рынкахОт EverandПростой подход к интернет-трейдингу: Как научиться основам интернет-трейдинга для успешной торговли на финансовых рынкахОценок пока нет
- Создаем динамические веб-сайты с помощью PHP, MySQL, JavaScript, CSS и HTML5. 5-е изд.От EverandСоздаем динамические веб-сайты с помощью PHP, MySQL, JavaScript, CSS и HTML5. 5-е изд.Оценок пока нет