Вам также может понравиться
- Девочкин - Эл аппаратыДокумент240 страницДевочкин - Эл аппаратыviktorizmeraldovОценок пока нет
- Лекция - 12 Система электроснабжения постоянным токомДокумент9 страницЛекция - 12 Система электроснабжения постоянным токомAlexander KozlovОценок пока нет
- Гормаков А.Н. Расчёт и моделирование магнитных полей, создаваемых системойДокумент6 страницГормаков А.Н. Расчёт и моделирование магнитных полей, создаваемых системойqwerty2828Оценок пока нет
- Ключевые слова: электрический амортизатор, линейный генератор, постоянные магниты, Simulink-модельДокумент5 страницКлючевые слова: электрический амортизатор, линейный генератор, постоянные магниты, Simulink-модельdsb.info1905Оценок пока нет
- презентация блохина 5семДокумент12 страницпрезентация блохина 5семblohinaksenianskОценок пока нет
- Электрооборудование в Вопросах и ОтветахДокумент136 страницЭлектрооборудование в Вопросах и Ответах2533 9564Оценок пока нет
- Прохоров - Практикум По Электр Машинам Уч Пособ - Казань 2005Документ91 страницаПрохоров - Практикум По Электр Машинам Уч Пособ - Казань 2005snooty.eli.gamedogsОценок пока нет
- Short Circuit Current Calculation (RUS)Документ25 страницShort Circuit Current Calculation (RUS)FittillОценок пока нет
- 311 310 1 PBДокумент7 страниц311 310 1 PBVladimir LobyntsevОценок пока нет
- презентация5Документ12 страницпрезентация5blohinaksenianskОценок пока нет
- Linear Generator ModelДокумент6 страницLinear Generator ModelAlex AbakumovОценок пока нет
- Отчёт 6Документ6 страницОтчёт 6tajikshow26Оценок пока нет
- Ispytaniya Transformatora Na NagrevДокумент7 страницIspytaniya Transformatora Na NagrevАлексей СемёновОценок пока нет
- Konspekt K Uroku Peremennyj Tok 1 Kurs SpoДокумент37 страницKonspekt K Uroku Peremennyj Tok 1 Kurs SpoMaTvEyCyberPROBRO 2013Оценок пока нет
- 12409prezentaciya Na Temy Ymniy Dom1Документ20 страниц12409prezentaciya Na Temy Ymniy Dom1Гнполипрнг ПмлтимольОценок пока нет
- Lab124 2016Документ7 страницLab124 2016BunhammerОценок пока нет
- Пример КП - вариантДокумент31 страницаПример КП - вариантnikpay.nikpaev04Оценок пока нет
- Определение тока насыщения катушек индуктивности с магнитопроводамиДокумент4 страницыОпределение тока насыщения катушек индуктивности с магнитопроводамиBogdan DorofteyОценок пока нет
- Íîâàÿ Ýíåðãåòèêà. Æóðíàë. Новости Науки в Области Альтернативной Энергетики и Передовых Аэрокосмических Систем. #4 Июль - Август 2003.Документ76 страницÍîâàÿ Ýíåðãåòèêà. Æóðíàë. Новости Науки в Области Альтернативной Энергетики и Передовых Аэрокосмических Систем. #4 Июль - Август 2003.rotech groupОценок пока нет
- УП Источники питанияДокумент52 страницыУП Источники питанияEdsonОценок пока нет
- Другие патенты ТеслыДокумент42 страницыДругие патенты ТеслыAlex AlexОценок пока нет
- Сравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитамиДокумент7 страницСравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитамиamrrefkyОценок пока нет
- Miniatyurnye Koaksialnye Filtry Dlya Tsepey Upravleniya Mikroelektronnyh UstroystvДокумент6 страницMiniatyurnye Koaksialnye Filtry Dlya Tsepey Upravleniya Mikroelektronnyh UstroystvAlexandr BabaskinОценок пока нет
- 1-3 Датчики частоти обертання, момнту, переміщення, рівняДокумент24 страницы1-3 Датчики частоти обертання, момнту, переміщення, рівняТвой ХозяинОценок пока нет
- 17 20140818 CSTДокумент180 страниц17 20140818 CSTVitaliyGОценок пока нет
- Выбор высоковольтных кабелейДокумент6 страницВыбор высоковольтных кабелейИгорьОценок пока нет
- Лекция 3. Метод комплексных амплитудДокумент12 страницЛекция 3. Метод комплексных амплитудДаниил ПоговоровОценок пока нет
- Практическая силовая электроника №3 2010Документ52 страницыПрактическая силовая электроника №3 2010ewa999Оценок пока нет
- Канал измерения угловой скоростиДокумент31 страницаКанал измерения угловой скоростиtahir sadikovicОценок пока нет
- Практическая ЕЛ 1Документ9 страницПрактическая ЕЛ 1АлексейОценок пока нет
- Lab 3 07Документ14 страницLab 3 07Данила СвиненковОценок пока нет
- Formirovanie Razryadnogo Impulsa V Sistemah Na Baze Elektrogidravlicheskogo EffektaДокумент20 страницFormirovanie Razryadnogo Impulsa V Sistemah Na Baze Elektrogidravlicheskogo EffektaМишаОценок пока нет
- Elektromagnetizm 01Документ74 страницыElektromagnetizm 01Eletrica 2 Rotec330Оценок пока нет
- Instrucția АНПИДокумент15 страницInstrucția АНПИOlimpia GrozavuОценок пока нет
- 11 Есеп.жарат.закироваДокумент57 страниц11 Есеп.жарат.закироваSaltanat AskarovaОценок пока нет
- Elkoushy Moustafa M402-BKiДокумент18 страницElkoushy Moustafa M402-BKiMoustafa ElkoushyОценок пока нет
- Коровин Ю.В. Расчет токов короткого замыкания в электрических системах PDFДокумент115 страницКоровин Ю.В. Расчет токов короткого замыкания в электрических системах PDFРоман КиямовОценок пока нет
- НАНОСЕКУНДНЫЙ SOS ГЕНЕРАТОРДокумент6 страницНАНОСЕКУНДНЫЙ SOS ГЕНЕРАТОРFastFox Pavlik MorozovОценок пока нет
- g определяется соотношением L G gДокумент2 страницыg определяется соотношением L G gOlka ShyОценок пока нет
- Соболев Расчет Зануления 2004 с ДополнДокумент39 страницСоболев Расчет Зануления 2004 с ДополнdmaxОценок пока нет
- ElektromagДокумент11 страницElektromagnnnnnnnnnnnnnОценок пока нет
- Все ПОСОБИЕ Трансформаторы Для СисДокумент173 страницыВсе ПОСОБИЕ Трансформаторы Для СисVad ZОценок пока нет
- Idz2 Electr Pichugin PDFДокумент12 страницIdz2 Electr Pichugin PDFAnonymous cYpEVvoОценок пока нет
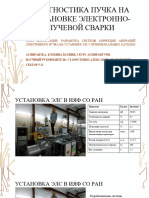
- Cистема диагностики ЭРДДокумент24 страницыCистема диагностики ЭРДErden AbdykalykОценок пока нет
- Определение вольт - амперной характеристики вентильного разрядникаДокумент4 страницыОпределение вольт - амперной характеристики вентильного разрядникаЯковОценок пока нет
- Электромагнитные колебания - контрольнаяДокумент1 страницаЭлектромагнитные колебания - контрольнаяbest19721206Оценок пока нет
- 1Документ23 страницы1Vladimir SemenovОценок пока нет
- Лекции - Машины постоянного тока (МПТ)Документ15 страницЛекции - Машины постоянного тока (МПТ)Александр ЛопушанскийОценок пока нет
- РЗА Вар.16 Люблин Ф.А.Документ21 страницаРЗА Вар.16 Люблин Ф.А.ФилиппОценок пока нет
- презентация 4Документ15 страницпрезентация 4blohinaksenianskОценок пока нет
- ТВН - вар. 83 (зад. 1,3,4,5) Люблин Ф.А.Документ21 страницаТВН - вар. 83 (зад. 1,3,4,5) Люблин Ф.А.ФилиппОценок пока нет
- Томский политехнический университет E#mail: aipush@mail.ru: Ключевые слова: Key wordsДокумент4 страницыТомский политехнический университет E#mail: aipush@mail.ru: Ключевые слова: Key wordsAlexandr BabaskinОценок пока нет
- Лекция 3 Магнитострикционный и 1Документ7 страницЛекция 3 Магнитострикционный и 1Ростислав ГеннадьевичОценок пока нет
- Ñ Ñ Ðºð Ркð Ð Ñ Ñ ÑДокумент2 страницыÑ Ñ Ðºð Ркð Ð Ñ Ñ ÑQwertyОценок пока нет
- ТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙДокумент34 страницыТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙGulshan HaciyevaОценок пока нет
- ТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙДокумент34 страницыТЕХНИКА ВЫСОКИХ НАПРЯЖЕНИЙGulshan HaciyevaОценок пока нет
- Moskatov E. - Teoriia Rascheeta ItДокумент21 страницаMoskatov E. - Teoriia Rascheeta Itsnooty.eli.gamedogsОценок пока нет
- LR - em - 1 - RusДокумент10 страницLR - em - 1 - RusОлегОценок пока нет
- Ekzamen Elektrotekhnika 5 22Документ7 страницEkzamen Elektrotekhnika 5 22Eugeniu ZamfirovОценок пока нет
- Множества и отображенияДокумент29 страницМножества и отображенияTypicalGuyReadingThisОценок пока нет
- ZX 950 ManualДокумент68 страницZX 950 ManualOdessaОценок пока нет
- Презентация по проектуДокумент13 страницПрезентация по проектуDwadwОценок пока нет
- Обоснование Рационального Температурного Режима ТрубопроводногоДокумент146 страницОбоснование Рационального Температурного Режима ТрубопроводноговладОценок пока нет
- Wabco Ebs Opisanie SistemiДокумент44 страницыWabco Ebs Opisanie SistemiгеннадийОценок пока нет
- СТЕРЕОМЕТРИЯ ЕГЭДокумент17 страницСТЕРЕОМЕТРИЯ ЕГЭRidder NagaОценок пока нет
- Революционный метод быстрого изучения любого иностранного языка (Revoljucionnyj metod bystrogo izuchenija ljubogo inostrannogo jazyka)От EverandРеволюционный метод быстрого изучения любого иностранного языка (Revoljucionnyj metod bystrogo izuchenija ljubogo inostrannogo jazyka)Рейтинг: 2 из 5 звезд2/5 (1)
- Справочник мастера-электрика. Проводка, розетки, техника безопасности, инструмент (Spravochnik mastera-jelektrika. Provodka, rozetki, tehnika bezopasnosti, instrument)От EverandСправочник мастера-электрика. Проводка, розетки, техника безопасности, инструмент (Spravochnik mastera-jelektrika. Provodka, rozetki, tehnika bezopasnosti, instrument)Оценок пока нет
- Elon Musk: Rules of Success [Russian Edition]От EverandElon Musk: Rules of Success [Russian Edition]Рейтинг: 4.5 из 5 звезд4.5/5 (20)
- Второй мозг: Как микробы в кишечнике управляют нашим настроением, решениями и здоровьемОт EverandВторой мозг: Как микробы в кишечнике управляют нашим настроением, решениями и здоровьемОценок пока нет
- 100 рассказов из истории медицины: Величайшие открытия, подвиги и преступления во имя вашего здоровья и долголетия. Часть 2, рассказы с 51 по 100От Everand100 рассказов из истории медицины: Величайшие открытия, подвиги и преступления во имя вашего здоровья и долголетия. Часть 2, рассказы с 51 по 100Оценок пока нет
- Биология добра и зла. Как наука объясняет наши поступки. Часть 1От EverandБиология добра и зла. Как наука объясняет наши поступки. Часть 1Рейтинг: 4.5 из 5 звезд4.5/5 (7)
- Математика с дурацкими рисунками: Идеи, которые формируют нашу реальностьОт EverandМатематика с дурацкими рисунками: Идеи, которые формируют нашу реальностьОценок пока нет
- Еда, которая лечит суставы, позвоночник, сердце, сосуды, диабет. 600 рецептов блюд, которые помогут вам выздороветь (Eda, kotoraja lechit sustavy, pozvonochnik, serdce, sosudy, diabet. 600 receptov bljud, kotorye pomogut vam vyzdorovet')От EverandЕда, которая лечит суставы, позвоночник, сердце, сосуды, диабет. 600 рецептов блюд, которые помогут вам выздороветь (Eda, kotoraja lechit sustavy, pozvonochnik, serdce, sosudy, diabet. 600 receptov bljud, kotorye pomogut vam vyzdorovet')Оценок пока нет
- Большой универсальный справочник лекарственных препаратов. Более 5000 современных средств и аналогов (Bol'shoj universal'nyj spravochnik lekarstvennyh preparatov. Bolee 5000 sovremennyh sredstv i analogov)От EverandБольшой универсальный справочник лекарственных препаратов. Более 5000 современных средств и аналогов (Bol'shoj universal'nyj spravochnik lekarstvennyh preparatov. Bolee 5000 sovremennyh sredstv i analogov)Оценок пока нет