Вам также может понравиться
- 10МДокумент34 страницы10Мanton.2002.07Оценок пока нет
- MM 9Документ21 страницаMM 9predator1990Оценок пока нет
- Abstract. The Development of Electric Vehicles Is The Highest Priority in The Development of MotorДокумент11 страницAbstract. The Development of Electric Vehicles Is The Highest Priority in The Development of MotorFarhodjon AbdusamatovОценок пока нет
- параллельная работа тртДокумент9 страницпараллельная работа тртmovaevgenijОценок пока нет
- Электротехника. Синхронные Электрические МашиныДокумент20 страницЭлектротехника. Синхронные Электрические Машиныzaur yarahmədovОценок пока нет
- Possible Methods of Implementation of Economic Control of Electromechanical Transmission in Large Trucks With DC Traction AlternatorДокумент4 страницыPossible Methods of Implementation of Economic Control of Electromechanical Transmission in Large Trucks With DC Traction AlternatorАлександр ШевченкоОценок пока нет
- Motor-Generatory Modifikatsii GrammaДокумент14 страницMotor-Generatory Modifikatsii GrammaEsteban MurilloОценок пока нет
- Бесконтактный двигатель постоянного тока. РефератДокумент19 страницБесконтактный двигатель постоянного тока. РефератЕвгений МарченкоОценок пока нет
- Лекция 1 ЕМС дополнДокумент7 страницЛекция 1 ЕМС дополнcxvbn124r4Оценок пока нет
- 2416 2905 1 PBДокумент17 страниц2416 2905 1 PBHà VũОценок пока нет
- Bazele Actionarilor Electrice 2Документ18 страницBazele Actionarilor Electrice 2Сергей ВолошинОценок пока нет
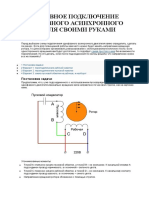
- РЕВЕРСИВНОЕ ПОДКЛЮЧЕНИЕ ОДНОФАЗНОГО ДВИГАТЕЛЯДокумент5 страницРЕВЕРСИВНОЕ ПОДКЛЮЧЕНИЕ ОДНОФАЗНОГО ДВИГАТЕЛЯAxioma AxiomaОценок пока нет
- 200Документ50 страниц200Bohdan Podhornyi75% (4)
- Sevik CepiДокумент16 страницSevik CepiSANS WDОценок пока нет
- Практическое руководство по устройствам свободной энергии часть 2 (Патрик Дж.К.) (Z-Library)Документ52 страницыПрактическое руководство по устройствам свободной энергии часть 2 (Патрик Дж.К.) (Z-Library)ZAKAVELO jean christianОценок пока нет
- Linear Generator ModelДокумент6 страницLinear Generator ModelAlex AbakumovОценок пока нет
- Подключение Генератора в Параллельную Работу с Другим Генератором.Документ10 страницПодключение Генератора в Параллельную Работу с Другим Генератором.VladimirОценок пока нет
- приоритетные вопросыДокумент32 страницыприоритетные вопросыAntonОценок пока нет
- 31 38Документ7 страниц31 38Данил МедведевОценок пока нет
- Конспект 3Документ12 страницКонспект 3ИгорьОценок пока нет
- Госэкз вопр по САЭП (Судовые автоматизированные электроприводы) - 2-й варДокумент124 страницыГосэкз вопр по САЭП (Судовые автоматизированные электроприводы) - 2-й варДмитрий ШпилевойОценок пока нет
- Сравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитамиДокумент7 страницСравнительный анализ векторного управления и прямого управления моментом синхронного электродвигателя с постоянными магнитамиamrrefkyОценок пока нет
- Info 28BYJ-48-5V ULN2003Документ8 страницInfo 28BYJ-48-5V ULN2003jonatanactosОценок пока нет
- Асинхроная машина БоднарчукДокумент8 страницАсинхроная машина БоднарчукmihaiОценок пока нет
- статья УстиновДокумент5 страницстатья УстиновНикита УстиновОценок пока нет
- ЛАБА 3 ОТВЕТЫДокумент5 страницЛАБА 3 ОТВЕТЫАндрей ВеричОценок пока нет
- Ekzamen Elektrotekhnika 5 22Документ7 страницEkzamen Elektrotekhnika 5 22Eugeniu ZamfirovОценок пока нет
- СВАРН (конспект 2021)Документ20 страницСВАРН (конспект 2021)maklaren5678Оценок пока нет
- Asinhronie MasiniДокумент14 страницAsinhronie MasinimihaiОценок пока нет
- Автомобильные генераторные установкиДокумент4 страницыАвтомобильные генераторные установкиYauheni KapeikinОценок пока нет
- 1-3 Датчики частоти обертання, момнту, переміщення, рівняДокумент24 страницы1-3 Датчики частоти обертання, момнту, переміщення, рівняТвой ХозяинОценок пока нет
- 5мДокумент5 страниц5мanton.2002.07Оценок пока нет
- Автоматическая коробка переключения передач с электронным управлениемДокумент24 страницыАвтоматическая коробка переключения передач с электронным управлениемYauheni KapeikinОценок пока нет
- Zasarinin Phi MashineДокумент4 страницыZasarinin Phi Mashineandis_aОценок пока нет
- Судовые Электроэнергетические СистемыДокумент446 страницСудовые Электроэнергетические СистемыD ArsenОценок пока нет
- BazeleДокумент7 страницBazeleСергей ВолошинОценок пока нет
- 3Документ37 страниц3zaur yarahmədovОценок пока нет
- Вопросы Для Электромехаников и Электрокадетов При Прохождении Собеседований в Крюингах - Судовой ЭлектромеханикДокумент7 страницВопросы Для Электромехаников и Электрокадетов При Прохождении Собеседований в Крюингах - Судовой ЭлектромеханикnarkomanizcaОценок пока нет
- ЭО ЛА 03 Авиационные генераторыДокумент21 страницаЭО ЛА 03 Авиационные генераторыtahir sadikovicОценок пока нет
- 13 Lekciya Transmissiya Traktorov I AvtomobilejДокумент20 страниц13 Lekciya Transmissiya Traktorov I AvtomobilejИванОценок пока нет
- Shevchenko A.I. Regimen Recuperation of Electrical Transmission in Large TruckДокумент5 страницShevchenko A.I. Regimen Recuperation of Electrical Transmission in Large TruckАлександр ШевченкоОценок пока нет
- File 20230603 173121 R4878Документ78 страницFile 20230603 173121 R4878thinhОценок пока нет
- DiiselgeneraatoridДокумент4 страницыDiiselgeneraatoridavtomaatikОценок пока нет
- ДокладДокумент5 страницДокладÉduardo LopesОценок пока нет
- Seminary 1Документ39 страницSeminary 1Даниил КамольцевОценок пока нет
- Книга.подключение 3х-Фазного ДвигателяДокумент1 страницаКнига.подключение 3х-Фазного ДвигателяDeadMikeОценок пока нет
- Занимательная электротехника. Электрические двигатели : мангаОт EverandЗанимательная электротехника. Электрические двигатели : мангаОценок пока нет
- Лекция №14.Преобразователи частоты.Документ6 страницЛекция №14.Преобразователи частоты.Андрей ШинкаренкоОценок пока нет
- Схема АТХ 250Документ24 страницыСхема АТХ 250Анатолий ШвецОценок пока нет
- UntitledДокумент16 страницUntitledMalgorzata LeszczynskaОценок пока нет
- Реверсор тока резонансный PDFДокумент8 страницРеверсор тока резонансный PDFSamvel YesayanОценок пока нет
- Магнето. Устройство и работа. Виды и применениеДокумент11 страницМагнето. Устройство и работа. Виды и применениеАлекс ИвановОценок пока нет
- Spos Puska Asdvig 2008Документ2 страницыSpos Puska Asdvig 2008cementsaimОценок пока нет
- доклад Рябченко А.С. НА СДАЧУ 30.03Документ10 страницдоклад Рябченко А.С. НА СДАЧУ 30.03антонОценок пока нет
- Самозапуск электродвигателей собственных нуждДокумент22 страницыСамозапуск электродвигателей собственных нуждemil.nuriyev1Оценок пока нет
- Реферат Управляемые трехфазные выпрямители (Копытин)Документ14 страницРеферат Управляемые трехфазные выпрямители (Копытин)DmitriОценок пока нет
- Презентация ЭиЭМиМ Электрические машины переменного токаДокумент38 страницПрезентация ЭиЭМиМ Электрические машины переменного токаКарим ТимеркаевОценок пока нет
- Резонансный инверторДокумент4 страницыРезонансный инверторДенис ЗюзинОценок пока нет
- 7мДокумент17 страниц7мanton.2002.07Оценок пока нет
- Clymer 7 RUДокумент43 страницыClymer 7 RUIgorОценок пока нет
- WTG-25 L1Документ41 страницаWTG-25 L1IvanОценок пока нет
- L1Документ24 страницыL1IvanОценок пока нет
- L1Документ24 страницыL1IvanОценок пока нет
- изображение - viber - 2023 01 05 - 10 01 37 314Документ2 страницыизображение - viber - 2023 01 05 - 10 01 37 314IvanОценок пока нет
- QT2Документ56 страницQT2Максим ЗапорожецьОценок пока нет
- 4 Strukturnye Urovni Organizatsii MateriiДокумент8 страниц4 Strukturnye Urovni Organizatsii MateriiОльгаОценок пока нет
- Parametricheskij GeneratorДокумент7 страницParametricheskij GeneratorEsteban MurilloОценок пока нет
- Aerodinamika T.Demonova PDFДокумент283 страницыAerodinamika T.Demonova PDFjexon1959ufm bobОценок пока нет
- Руководство пользователя - MATRIXДокумент99 страницРуководство пользователя - MATRIXandreОценок пока нет
- Основы гидравлики и теплотехники 2022 Замалеев, Посохин, ЧефановДокумент349 страницОсновы гидравлики и теплотехники 2022 Замалеев, Посохин, ЧефановdvabublikiОценок пока нет