Вам также может понравиться
- Задачи гидроупругостиДокумент22 страницыЗадачи гидроупругостиЕвгений БанинОценок пока нет
- ++1 КОЛЕБАНИЯ ПЛОСКОЙ СПИРАЛЬНОЙ ПРУЖИНЫ 2 3Документ8 страниц++1 КОЛЕБАНИЯ ПЛОСКОЙ СПИРАЛЬНОЙ ПРУЖИНЫ 2 3SherbekОценок пока нет
- 41 46Документ6 страниц41 46William VenegasОценок пока нет
- (Астафьев. Федорченко) АВТОМОДЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ О РАЗВИТИИДокумент8 страниц(Астафьев. Федорченко) АВТОМОДЕЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ О РАЗВИТИИAlex BaykinОценок пока нет
- Dvuhtsiklicheskoe Rasscheplenie Po Fizicheskim Protsessam Uravneniy Navie StoksaДокумент1 страницаDvuhtsiklicheskoe Rasscheplenie Po Fizicheskim Protsessam Uravneniy Navie Stoksabombardir.2001Оценок пока нет
- Расчетное задание LEMANHDATДокумент49 страницРасчетное задание LEMANHDATManh Dat LeОценок пока нет
- Point EstimatorsДокумент10 страницPoint EstimatorsEilen EspitiaОценок пока нет
- AttractorДокумент32 страницыAttractorzlataworkuwuОценок пока нет
- Aouaouda (01 06 2022)Документ37 страницAouaouda (01 06 2022)hisao fujita yashimaОценок пока нет
- 12 KharlamovДокумент4 страницы12 KharlamovsafОценок пока нет
- ШпоргалкаДокумент31 страницаШпоргалкаnano9valОценок пока нет
- Исследование прямолинейно-параллельного установившегосяДокумент7 страницИсследование прямолинейно-параллельного установившегосяmoustaphaОценок пока нет
- KöçürməДокумент4 страницыKöçürməFakhriyya GaflanovaОценок пока нет
- Тема2 2021 иДокумент24 страницыТема2 2021 иkesinkiОценок пока нет
- Конспект 2020 PDFДокумент138 страницКонспект 2020 PDFАлександр КонкинОценок пока нет
- Motylev 1990Документ12 страницMotylev 1990Ciprian ComanОценок пока нет
- Курсовая 8 семестрДокумент23 страницыКурсовая 8 семестрSajoura SalahОценок пока нет
- SA LaboratorДокумент24 страницыSA LaboratorAna Bița-ȚurcanОценок пока нет
- 69 74Документ6 страниц69 74Just Do itОценок пока нет
- Uhmj 7 2010 35Документ10 страницUhmj 7 2010 35Stevo JaćimovskiОценок пока нет
- Динамика вблизи твердой стенкиДокумент10 страницДинамика вблизи твердой стенкиmОценок пока нет
- ОИТ ЛБ №2Документ18 страницОИТ ЛБ №2popovanna71564Оценок пока нет
- Metod Rasschepleniya V Zadache MezometeorologiiДокумент1 страницаMetod Rasschepleniya V Zadache MezometeorologiiTan UmisomeОценок пока нет
- (Ю. Г. Коноплев и др.) - Динамическая устойчивость упругих пластин и оболочек - учебное пособие-Казанский ун-т (2012)Документ80 страниц(Ю. Г. Коноплев и др.) - Динамическая устойчивость упругих пластин и оболочек - учебное пособие-Казанский ун-т (2012)Fruit DivaОценок пока нет
- Lecture 10Документ2 страницыLecture 10Lanaya WizОценок пока нет
- доп задание омм №2Документ4 страницыдоп задание омм №2nuralievasaadat1506Оценок пока нет
- Postroenie Optimalnyh Traektoriy V Mnogomernyh Prostranstvah Na Osnove Fizicheskih ModeleyДокумент10 страницPostroenie Optimalnyh Traektoriy V Mnogomernyh Prostranstvah Na Osnove Fizicheskih ModeleyVartan Babayan4Оценок пока нет
- Особенности Термогидродинамических Процессов в Горизонтальных СкважинахДокумент19 страницОсобенности Термогидродинамических Процессов в Горизонтальных СкважинахTwirXОценок пока нет
- 1972 Кварц Термоанемом Для Розр Газу Гіперзвук ТечДокумент7 страниц1972 Кварц Термоанемом Для Розр Газу Гіперзвук ТечVitalii TkachukОценок пока нет
- Лекция 1.pdf (262 Кб)Документ14 страницЛекция 1.pdf (262 Кб)Вероника ЕреминаОценок пока нет
- Стоячая волна-ot-voln-na-strune-do-voln-de-broylyaДокумент7 страницСтоячая волна-ot-voln-na-strune-do-voln-de-broylyasugar marmelateОценок пока нет
- Lecture 13Документ2 страницыLecture 13Lanaya WizОценок пока нет
- MetodichkapeshevДокумент20 страницMetodichkapeshevlapushkin.2001.dimaОценок пока нет
- РА-ПЗ ч.1Документ49 страницРА-ПЗ ч.14aikaОценок пока нет
- Tasks Phys 11 Prak Reg 13 4Документ3 страницыTasks Phys 11 Prak Reg 13 4Arsen AsatryanОценок пока нет
- Var 11 2 Kvant PDFДокумент9 страницVar 11 2 Kvant PDFПётр КрюковОценок пока нет
- Guia5 2017Документ3 страницыGuia5 2017David GonzalezОценок пока нет
- Тема1 2021Документ46 страницТема1 2021kesinkiОценок пока нет
- Ур-е Фоккера-Планка акции РоснефтьДокумент7 страницУр-е Фоккера-Планка акции РоснефтьmuhfuhОценок пока нет
- 43457Документ6 страниц43457sergeyfanchenkoОценок пока нет
- Вестник РАУ. Российско-Армянский университет. 38Документ154 страницыВестник РАУ. Российско-Армянский университет. 38georgeblogОценок пока нет
- Elibrary 24406051 34429147Документ9 страницElibrary 24406051 34429147Vadim VoropayОценок пока нет
- Лабораторная работа №1 ИССЛЕДОВАНИЕ ПРЯМОЛИНЕЙНО-ПАРАЛЛЕЛЬНОГО УСТАНОВИВШЕГОСЯ ФИЛЬТРАЦИОННОГО ПОТОКА НЕСЖИМАЕМОЙ ЖИДКОСТИ В ОДНОРОДНОМ ПЛАСТЕДокумент16 страницЛабораторная работа №1 ИССЛЕДОВАНИЕ ПРЯМОЛИНЕЙНО-ПАРАЛЛЕЛЬНОГО УСТАНОВИВШЕГОСЯ ФИЛЬТРАЦИОННОГО ПОТОКА НЕСЖИМАЕМОЙ ЖИДКОСТИ В ОДНОРОДНОМ ПЛАСТЕмихаилОценок пока нет
- ⋅cos (ωt + ϕ)Документ2 страницы⋅cos (ωt + ϕ)Mxfxk ManeОценок пока нет
- MolLab Labwork 3-3Документ26 страницMolLab Labwork 3-3Ccc AaaОценок пока нет
- (Авраменко) О k-e модели турбулентностиДокумент21 страница(Авраменко) О k-e модели турбулентностиЕвгений Банин100% (1)
- TSДокумент15 страницTSadsasdОценок пока нет
- Задачи по аналитической механике PDFДокумент50 страницЗадачи по аналитической механике PDFАлександр КонкинОценок пока нет
- TOE Perekhodnye Protsessy Praktiki 1 2Документ23 страницыTOE Perekhodnye Protsessy Praktiki 1 2toe757Оценок пока нет
- Kriterii Narusheniya Vyvodov Teorii Veroyatnostey I Ih Primenenie V Himicheskoy KinetikeДокумент9 страницKriterii Narusheniya Vyvodov Teorii Veroyatnostey I Ih Primenenie V Himicheskoy KinetikeTan UmisomeОценок пока нет
- Lecture 11Документ2 страницыLecture 11Lanaya WizОценок пока нет
- 1Документ150 страниц1asyaОценок пока нет
- Lab 4Документ7 страницLab 4Fernando CasasОценок пока нет
- Lecture 8Документ2 страницыLecture 8Lanaya WizОценок пока нет
- Ustoychivost Matematicheskih Modeley Tipa Hischnik ZhertvaДокумент8 страницUstoychivost Matematicheskih Modeley Tipa Hischnik ZhertvaЕгор ДмитриенкоОценок пока нет
- КОЛЕБАНИЯ И ВОЛНЫ МИФИДокумент48 страницКОЛЕБАНИЯ И ВОЛНЫ МИФИКолобок ТрбОценок пока нет
- Ершов Д.С., Ершов С.В., Русанов А.В. - Численное моделирование турбулентности гибридными методами RANS - LESДокумент4 страницыЕршов Д.С., Ершов С.В., Русанов А.В. - Численное моделирование турбулентности гибридными методами RANS - LESСтепан ДовбенкоОценок пока нет
- 11 Есеп.жарат.закироваДокумент57 страниц11 Есеп.жарат.закироваSaltanat AskarovaОценок пока нет
- DZ 3Документ8 страницDZ 3iiubka6biОценок пока нет
- Применение системы ANSYS к решению задач геометрического и конечно-элементного моделированияДокумент115 страницПрименение системы ANSYS к решению задач геометрического и конечно-элементного моделированияAndrei ChornyОценок пока нет
- !!!!!!!Документ9 страниц!!!!!!!Andrei ChornyОценок пока нет
- News STB 1080-2011Документ27 страницNews STB 1080-2011Andrei ChornyОценок пока нет
- Движение Аэрозольных Частиц в ПотокеДокумент91 страницаДвижение Аэрозольных Частиц в ПотокеAndrei ChornyОценок пока нет
- Lek 11Документ67 страницLek 11Andrei ChornyОценок пока нет
- Марон В. И. - Гидравлика двухфазных потоков в трубопроводах (2012, Издательство - Лань -)Документ249 страницМарон В. И. - Гидравлика двухфазных потоков в трубопроводах (2012, Издательство - Лань -)Giovanni MedranoОценок пока нет
- Shacman F2000 WP10 EDC 17Документ2 страницыShacman F2000 WP10 EDC 17andreyuspeshnyiОценок пока нет
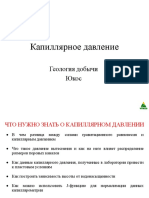
- Capillary Pressure - Rus - OkДокумент23 страницыCapillary Pressure - Rus - OkiskanderОценок пока нет
- PDS POWERGUARD™ 6051 - Rus PDFДокумент1 страницаPDS POWERGUARD™ 6051 - Rus PDFВиталий МельникОценок пока нет
- Регенерация ОМТИДокумент3 страницыРегенерация ОМТИВикторОценок пока нет
- Счастливый Карман, Полный Денег: Формирования сознания изобилияОт EverandСчастливый Карман, Полный Денег: Формирования сознания изобилияРейтинг: 5 из 5 звезд5/5 (1)
- Странные совпадения в твоей жизни. Маленькие любопытные события. Предчувствия. Телепатия. С тобой тоже такое случается? Квантовая физика и теория синхронизма объясняют экстрасенсорные явления.От EverandСтранные совпадения в твоей жизни. Маленькие любопытные события. Предчувствия. Телепатия. С тобой тоже такое случается? Квантовая физика и теория синхронизма объясняют экстрасенсорные явления.Оценок пока нет
- Всё, что движется: Прогулки по беспокойной Вселенной. От космических орбит до квантовых полейОт EverandВсё, что движется: Прогулки по беспокойной Вселенной. От космических орбит до квантовых полейОценок пока нет
- Как устроен мир на самом деле. Наше прошлое, настоящее и будущее глазами ученогоОт EverandКак устроен мир на самом деле. Наше прошлое, настоящее и будущее глазами ученогоОценок пока нет
- Вселенная разумна. Душа существует. Квантовые загадки, мультивселенная, квантовая запутанность, синхронность. Преодоление материализма для духовного видения космоса.От EverandВселенная разумна. Душа существует. Квантовые загадки, мультивселенная, квантовая запутанность, синхронность. Преодоление материализма для духовного видения космоса.Оценок пока нет
- Квантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.От EverandКвантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.Оценок пока нет
- Магия физики: Как управлять тайными силами материи, создавать вещества из квантового мира и вызывать кристаллы из хаосаОт EverandМагия физики: Как управлять тайными силами материи, создавать вещества из квантового мира и вызывать кристаллы из хаосаОценок пока нет
- Квантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.От EverandКвантовая запутанность и коллективное бессознательное. Физика и метафизика вселенной. Новые интерпретации.Оценок пока нет
- “ЛАБИРИНТЫ КОМБИНАТОРНОЙ ЛИТЕРАТУРЫ: от палиндрома к фракталу”От Everand“ЛАБИРИНТЫ КОМБИНАТОРНОЙ ЛИТЕРАТУРЫ: от палиндрома к фракталу”Оценок пока нет
- Во власти цифр. Как числа управляют нашей жизнью и вводят в заблуждениеОт EverandВо власти цифр. Как числа управляют нашей жизнью и вводят в заблуждениеОценок пока нет