Вам также может понравиться
- Чурин М Ю Навигация, ведение навигационной прокладки Курс лекцийДокумент136 страницЧурин М Ю Навигация, ведение навигационной прокладки Курс лекцийS Eshgin AlizadeОценок пока нет
- Лекция 4Документ19 страницЛекция 4oolleeggnnnОценок пока нет
- Лекция 3Документ36 страницЛекция 3oolleeggnnnОценок пока нет
- Лекция 15Документ17 страницЛекция 15oolleeggnnnОценок пока нет
- Лекция 1Документ10 страницЛекция 1oolleeggnnnОценок пока нет
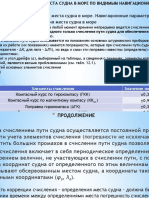
- ОПРЕДЕЛЕНИЕ МЕСТА В МОРЕДокумент34 страницыОПРЕДЕЛЕНИЕ МЕСТА В МОРЕGlebОценок пока нет
- Lekcii Po NavigaciiДокумент25 страницLekcii Po NavigaciiЕвгений ОленюкОценок пока нет
- ПР Л № 1 (6.1) НАВИГАЦИЯ 5 ОСН СЕМЕСТРДокумент28 страницПР Л № 1 (6.1) НАВИГАЦИЯ 5 ОСН СЕМЕСТРsugaipov228Оценок пока нет
- Маневренный планшетДокумент24 страницыМаневренный планшетДмитрий КрымченкоОценок пока нет
- Manuvr Planshet PDFДокумент24 страницыManuvr Planshet PDFДанил КравченкоОценок пока нет
- Manuvr PlanshetДокумент24 страницыManuvr PlanshetРуслан ДроголюбовОценок пока нет
- Navigation - копияДокумент38 страницNavigation - копияHead OwnerОценок пока нет
- РЕЧЬДокумент7 страницРЕЧЬAlexeyОценок пока нет
- SamoletovozhdenieДокумент80 страницSamoletovozhdenieTaso SadikovicОценок пока нет
- Ответы ГКК НиколаевДокумент69 страницОтветы ГКК НиколаевViktor FominОценок пока нет
- Ответы ГКК НиколаевДокумент69 страницОтветы ГКК НиколаевViktor FominОценок пока нет
- решение задач по мореходной астрономии PDFДокумент32 страницырешение задач по мореходной астрономии PDFАндрей АнисимовОценок пока нет
- решение задач по мореходной астрономии PDFДокумент32 страницырешение задач по мореходной астрономии PDFАндрей АнисимовОценок пока нет
- enpДокумент57 страницenpКуринаки КириллОценок пока нет
- Лекция 2Документ19 страницЛекция 2oolleeggnnnОценок пока нет
- Все 35 Билетов. ГосыДокумент140 страницВсе 35 Билетов. ГосыВлад ТищенкоОценок пока нет
- Использования Электронавигационных Приборов в СудовожденииДокумент57 страницИспользования Электронавигационных Приборов в Судовожденииvladimer bogdanovОценок пока нет
- САРПДокумент29 страницСАРПДима ОдиерОценок пока нет
- КАК ВЫПОЛНЯЕТСЯ ПРОКЛАДКА НА МНКДокумент4 страницыКАК ВЫПОЛНЯЕТСЯ ПРОКЛАДКА НА МНКАлександр ГерасимовОценок пока нет
- Metodika Provedenija Draft S Urvej 437602761Документ34 страницыMetodika Provedenija Draft S Urvej 437602761vDeepDiveОценок пока нет
- MiG 29 INS SamoletaДокумент68 страницMiG 29 INS SamoletaTaso SadikovicОценок пока нет
- Reshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobieДокумент108 страницReshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobiejОценок пока нет
- Reshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobieДокумент108 страницReshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobiejОценок пока нет
- Вознесенский, Шерстнев - Остойчивость Судна в Вопросах и ОтветахДокумент36 страницВознесенский, Шерстнев - Остойчивость Судна в Вопросах и Ответах2533 9564Оценок пока нет
- Вопросы к Экзамену — ШпораДокумент25 страницВопросы к Экзамену — Шпораsugaipov228Оценок пока нет
- 114903Документ67 страниц114903Амир ТаушкановОценок пока нет
- ARPA KursyДокумент50 страницARPA KursyРуслан ДроголюбовОценок пока нет
- disciplins_i_navigaciaДокумент57 страницdisciplins_i_navigaciaКуринаки КириллОценок пока нет
- OstoichivostДокумент31 страницаOstoichivostMaksim ZaritskiiОценок пока нет
- Курсовая Работа NewДокумент45 страницКурсовая Работа NewCydrek EvoraОценок пока нет
- ШТУРМАНСКИЙ СПРАВОЧНИКДокумент273 страницыШТУРМАНСКИЙ СПРАВОЧНИКviktorОценок пока нет
- Задачи ТССДокумент15 страницЗадачи ТССЕГорОценок пока нет
- GOSYДокумент224 страницыGOSYsky.pie.pОценок пока нет
- Л № 1 (8,5) НАВИГАЦИЯ VI С.ОСНpptxДокумент27 страницЛ № 1 (8,5) НАВИГАЦИЯ VI С.ОСНpptxsugaipov228Оценок пока нет
- Kamchatgtu 042Документ123 страницыKamchatgtu 042Сергей ПавленовОценок пока нет
- Красавцев Б.И. Мореходная Астрономия, 1986Документ509 страницКрасавцев Б.И. Мореходная Астрономия, 1986Sergio Casco GuardiolaОценок пока нет
- Красавцев Б.И. Мореходная астрономия, 1986 PDFДокумент509 страницКрасавцев Б.И. Мореходная астрономия, 1986 PDFJerzy IdzikowskiОценок пока нет
- Расчёт посадки и остойчивостиДокумент27 страницРасчёт посадки и остойчивостиBorys NeomenkoОценок пока нет
- Астрономические способы определения места судна и поправки компасаДокумент2 страницыАстрономические способы определения места судна и поправки компасаOleksandr DolovanyukОценок пока нет
- Sailing-Constanta - SuecДокумент102 страницыSailing-Constanta - SuecКрасимир ГиговОценок пока нет
- Навигация и Лоция - 2009Документ591 страницаНавигация и Лоция - 2009Николай КузьменкоОценок пока нет
- Lab 1Документ10 страницLab 1Денис ФесенкоОценок пока нет
- Metodika Rascheta Trass Kosmicheskih Apparatov Distancionnogo Zondirovanija Zemli Dlja Dvuhrezimnogo Sposoba Nabljudenija Zemnoj PoverhnostiДокумент5 страницMetodika Rascheta Trass Kosmicheskih Apparatov Distancionnogo Zondirovanija Zemli Dlja Dvuhrezimnogo Sposoba Nabljudenija Zemnoj Poverhnostitahir sadikovicОценок пока нет
- Навигация Урок 3Документ8 страницНавигация Урок 38b6hjzhqwtОценок пока нет
- 74 Тесты по управлению судномДокумент15 страниц74 Тесты по управлению судномlii liiОценок пока нет
- Навигация Урок 2Документ3 страницыНавигация Урок 28b6hjzhqwtОценок пока нет
- Voyage Passage PlanДокумент7 страницVoyage Passage PlanКонстантин ПетрачковОценок пока нет
- Навигационная Линейка НЛ-10МДокумент7 страницНавигационная Линейка НЛ-10МSlavapilot BassmanОценок пока нет
- Kobernik RGZДокумент11 страницKobernik RGZVladimir MirОценок пока нет
- Lecture 7Документ24 страницыLecture 7rijexa1234Оценок пока нет
- МЕТ УК ТУСДокумент21 страницаМЕТ УК ТУСsat65Оценок пока нет
- Navigatsia I Lotsia-DmitrievДокумент516 страницNavigatsia I Lotsia-DmitrievKirill ShabanovОценок пока нет
- Тема «Определение истинного и кажущегося ветра на судне»Документ1 страницаТема «Определение истинного и кажущегося ветра на судне»danilpizik2002Оценок пока нет
- СЭУ Учебное пособиеДокумент139 страницСЭУ Учебное пособиеAleksey ZhavronenkoОценок пока нет
- Демиденко П.П. Судовые радиолокационные и радионавигационные системы (2008) PDFДокумент334 страницыДемиденко П.П. Судовые радиолокационные и радионавигационные системы (2008) PDFAleksey ZhavronenkoОценок пока нет
- Sar 9Документ13 страницSar 9Aleksey ZhavronenkoОценок пока нет
- Jma-3300 Руководство По ЭксплуатацииДокумент222 страницыJma-3300 Руководство По ЭксплуатацииOlegОценок пока нет
- Остойчивость судна рефератДокумент9 страницОстойчивость судна рефератAleksey ZhavronenkoОценок пока нет
- Geometricheskaya Optika 1Документ10 страницGeometricheskaya Optika 1Милада КрапивинаОценок пока нет
- Practich ChastДокумент36 страницPractich ChastKorolev87Оценок пока нет
- 15 16 PDFДокумент8 страниц15 16 PDFfresher552Оценок пока нет
- 32857Документ216 страниц32857Ulyana GovenkoОценок пока нет
- 200 Занимательных Логических Задач 37Документ37 страниц200 Занимательных Логических Задач 37jaОценок пока нет
- KinsvДокумент15 страницKinsvIrina IrinaОценок пока нет
- Algebra 10kl Arefieva Rus 2019 PDFДокумент291 страницаAlgebra 10kl Arefieva Rus 2019 PDFEgor FilistovichОценок пока нет
- VratelaДокумент10 страницVratelaникитаОценок пока нет
- Таблица Значений Тригонометрических Функций НекотоДокумент4 страницыТаблица Значений Тригонометрических Функций НекотоЛёня ХаоситОценок пока нет
- Gost 30893.1-2002Документ6 страницGost 30893.1-2002евгений ивановОценок пока нет
- 2. Геометрические фигурыДокумент15 страниц2. Геометрические фигурыЕлизаветаОценок пока нет
- Sol Phys 10 Teor Reg 22 23Документ18 страницSol Phys 10 Teor Reg 22 23sadovyy.danylo1Оценок пока нет
- Upravlenie Sudnom (Vladivostok 2010)Документ508 страницUpravlenie Sudnom (Vladivostok 2010)Elijah SmelkoffОценок пока нет
- 3 четвертьДокумент22 страницы3 четвертьmiki mausОценок пока нет
- 1325Документ81 страница1325eladowskiОценок пока нет
- CNCAP3100-100 (год 2011) -1Документ61 страницаCNCAP3100-100 (год 2011) -1Valeriy KobaОценок пока нет
- 6019552503Документ17 страниц6019552503Saikal DaniyarovaОценок пока нет
- Алфутова Н.Б., Устинов А.В. - Алгебра и теория чисел - 2009 PDFДокумент336 страницАлфутова Н.Б., Устинов А.В. - Алгебра и теория чисел - 2009 PDFnumeprenume1981Оценок пока нет
- Геометрия 8 класс - 7 - Подобные фигуры PDFДокумент26 страницГеометрия 8 класс - 7 - Подобные фигуры PDFМария LolipopОценок пока нет
- 2819Документ575 страниц2819Кирило СизоненкоОценок пока нет