Вам также может понравиться
- Лекция 4Документ19 страницЛекция 4oolleeggnnnОценок пока нет
- 811117Документ34 страницы811117nahidqasymov1Оценок пока нет
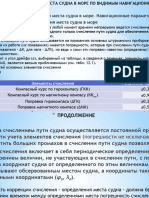
- ОПРЕДЕЛЕНИЕ МЕСТА В МОРЕДокумент34 страницыОПРЕДЕЛЕНИЕ МЕСТА В МОРЕGlebОценок пока нет
- Навигация и лоция .КРДокумент7 страницНавигация и лоция .КРAleksey ZhavronenkoОценок пока нет
- Чурин М Ю Навигация, ведение навигационной прокладки Курс лекцийДокумент136 страницЧурин М Ю Навигация, ведение навигационной прокладки Курс лекцийS Eshgin AlizadeОценок пока нет
- Лекция 3Документ36 страницЛекция 3oolleeggnnnОценок пока нет
- Navigation - копияДокумент38 страницNavigation - копияHead OwnerОценок пока нет
- СтворыДокумент4 страницыСтворыkristinaОценок пока нет
- КАК ВЫПОЛНЯЕТСЯ ПРОКЛАДКА НА МНКДокумент4 страницыКАК ВЫПОЛНЯЕТСЯ ПРОКЛАДКА НА МНКАлександр ГерасимовОценок пока нет
- Лекция 1Документ10 страницЛекция 1oolleeggnnnОценок пока нет
- Ответы ГКК НиколаевДокумент69 страницОтветы ГКК НиколаевViktor FominОценок пока нет
- Ответы ГКК НиколаевДокумент69 страницОтветы ГКК НиколаевViktor FominОценок пока нет
- САРПДокумент29 страницСАРПДима ОдиерОценок пока нет
- Lekcii Po NavigaciiДокумент25 страницLekcii Po NavigaciiЕвгений ОленюкОценок пока нет
- EnpДокумент57 страницEnpКуринаки КириллОценок пока нет
- Маневренный ПланшетДокумент9 страницМаневренный Планшетmiter53343Оценок пока нет
- Использования Электронавигационных Приборов в СудовожденииДокумент57 страницИспользования Электронавигационных Приборов в Судовожденииvladimer bogdanovОценок пока нет
- Лекция 5Документ24 страницыЛекция 5oolleeggnnnОценок пока нет
- рлсДокумент12 страницрлсНиколай ПышнякОценок пока нет
- ARPA KursyДокумент50 страницARPA KursyРуслан ДроголюбовОценок пока нет
- Лекция 2Документ19 страницЛекция 2oolleeggnnnОценок пока нет
- Все 35 Билетов. ГосыДокумент140 страницВсе 35 Билетов. ГосыВлад ТищенкоОценок пока нет
- Маневренный планшетДокумент24 страницыМаневренный планшетДмитрий КрымченкоОценок пока нет
- Лекция 1 МК МК2021-22у.гДокумент22 страницыЛекция 1 МК МК2021-22у.гКонстантин ПавленокОценок пока нет
- 971610Документ55 страниц971610Caesar videoОценок пока нет
- Manuvr Planshet PDFДокумент24 страницыManuvr Planshet PDFДанил КравченкоОценок пока нет
- Manuvr PlanshetДокумент24 страницыManuvr PlanshetРуслан ДроголюбовОценок пока нет
- Грузовая Марка СуднаДокумент6 страницГрузовая Марка СуднаjandiradminОценок пока нет
- Reshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobieДокумент108 страницReshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobiejОценок пока нет
- Reshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobieДокумент108 страницReshenie Osnovnykh Tipov Zadach Aeronavigatcii Uchebnoe PosobiejОценок пока нет
- GOSYДокумент224 страницыGOSYsky.pie.pОценок пока нет
- Metodika Provedenija Draft S Urvej 437602761Документ34 страницыMetodika Provedenija Draft S Urvej 437602761vDeepDiveОценок пока нет
- Dlya NaviqatorovДокумент78 страницDlya NaviqatorovS Eshgin AlizadeОценок пока нет
- Tema 6.Документ29 страницTema 6.efimОценок пока нет
- Полевое трассированиеДокумент14 страницПолевое трассированиеAnatolii BergОценок пока нет
- MK @MSITStore C Program Files (x86) QPS QINSy 8.17.0 HelpДокумент6 страницMK @MSITStore C Program Files (x86) QPS QINSy 8.17.0 HelpVladislav RomanovОценок пока нет
- SamoletovozhdenieДокумент80 страницSamoletovozhdenieTaso SadikovicОценок пока нет
- Вопросы к Экзамену - ШпораДокумент25 страницВопросы к Экзамену - Шпораsugaipov228Оценок пока нет
- Полёт с использованием маяков VORДокумент19 страницПолёт с использованием маяков VORIvanОценок пока нет
- Лекция TOFD МЭИДокумент31 страницаЛекция TOFD МЭИbaurzhannОценок пока нет
- GPS навигация. RAIMДокумент6 страницGPS навигация. RAIMAlexОценок пока нет
- Lektsii Po Navigatsii Morskaya Lotsia I Osobye SluchaiДокумент37 страницLektsii Po Navigatsii Morskaya Lotsia I Osobye SluchaiDmitry KarpikОценок пока нет
- Навигационный Индикатор HsiДокумент7 страницНавигационный Индикатор HsiMax VershОценок пока нет
- GEK Novy 1 30Документ156 страницGEK Novy 1 30Алексеи АлбулОценок пока нет
- Навигационная Линейка НЛ-10МДокумент7 страницНавигационная Линейка НЛ-10МSlavapilot BassmanОценок пока нет
- ПР Л № 1 (6.1) НАВИГАЦИЯ 5 ОСН СЕМЕСТРДокумент28 страницПР Л № 1 (6.1) НАВИГАЦИЯ 5 ОСН СЕМЕСТРsugaipov228Оценок пока нет
- Tema 3.Документ28 страницTema 3.efimОценок пока нет
- Lecture 7Документ24 страницыLecture 7rijexa1234Оценок пока нет
- вахтенный матрос билетыДокумент60 страницвахтенный матрос билетыВладимир ШепильОценок пока нет
- Антенная решетка из рупорно-линзовых антенн с электрическим качанием лучаДокумент24 страницыАнтенная решетка из рупорно-линзовых антенн с электрическим качанием лучаimax.max2017Оценок пока нет
- Навигация Урок 2Документ3 страницыНавигация Урок 28b6hjzhqwtОценок пока нет
- Лекция 14Документ5 страницЛекция 14oolleeggnnnОценок пока нет
- 3663-Voprosyi Bez Otvetov Dlya Agentstva 20200629 PDFДокумент1 170 страниц3663-Voprosyi Bez Otvetov Dlya Agentstva 20200629 PDFmarconiОценок пока нет
- ШТУРМАНСКИЙ СПРАВОЧНИКДокумент273 страницыШТУРМАНСКИЙ СПРАВОЧНИКviktorОценок пока нет
- Otvety Na Gosudarstvenny EkzamenДокумент20 страницOtvety Na Gosudarstvenny EkzamenDenis ShidlovskiyОценок пока нет
- Voyage Passage PlanДокумент7 страницVoyage Passage PlanКонстантин ПетрачковОценок пока нет
- Л № 1 (8,5) НАВИГАЦИЯ VI С.ОСНpptxДокумент27 страницЛ № 1 (8,5) НАВИГАЦИЯ VI С.ОСНpptxsugaipov228Оценок пока нет
- Лекция 10Документ72 страницыЛекция 10oolleeggnnnОценок пока нет
- Лекция 14Документ5 страницЛекция 14oolleeggnnnОценок пока нет
- Лекция 13Документ16 страницЛекция 13oolleeggnnnОценок пока нет
- Лекция 12Документ32 страницыЛекция 12oolleeggnnnОценок пока нет
- Лекция 10Документ72 страницыЛекция 10oolleeggnnnОценок пока нет
- Лекция 11Документ24 страницыЛекция 11oolleeggnnnОценок пока нет
- Лекция 5Документ24 страницыЛекция 5oolleeggnnnОценок пока нет
- Лекция 9Документ27 страницЛекция 9oolleeggnnnОценок пока нет
- Лекция 3Документ36 страницЛекция 3oolleeggnnnОценок пока нет
- Лекция 2Документ19 страницЛекция 2oolleeggnnnОценок пока нет
- Лекция 1Документ10 страницЛекция 1oolleeggnnnОценок пока нет
- Мощ дробных картДокумент9 страницМощ дробных картxena777555Оценок пока нет
- ПР РК 218-35-16 Инструкц. По Контролю Качества АвтодорогДокумент87 страницПР РК 218-35-16 Инструкц. По Контролю Качества АвтодорогKarligash UngarovaОценок пока нет
- Manual NavitelNavigator7 PND RUSДокумент57 страницManual NavitelNavigator7 PND RUSjonОценок пока нет
- Navigatsia I Lotsia-DmitrievДокумент516 страницNavigatsia I Lotsia-DmitrievKirill ShabanovОценок пока нет
- Метка места размещения: GPS HDOPДокумент50 страницМетка места размещения: GPS HDOPДмитрий ГалицкийОценок пока нет